In this episode of Robots in Depth, Per Sjöborg speaks with Jana Tumova, Assistant Professor at the KTH Royal Institute of Technology, about formal verification of computer systems and synthesizing controllers from models.
We get an introduction to the relatively new, especially when applied to robotics, field of formal verification. Jana talks about the requirements and limits of formal verification and how she feels we are ready to start merging the computer science process with regulatory and business processes.
Artificial intelligence could emulate human bias, including sexism, if there is no oversight on data used to create it, experts at the world's largest mobile phone fair in Barcelona warned Thursday.
Rather than getting immersed in ambiguous statistics and marketing buzzwords like flexible or fixed automation, this paper looks at the specific applications that favor each technology to chart the future of palletizing automation.
The sub-group of surgical robotics is the fastest growing area of robotic and automation adoption in the healthcare industry. We now have the ability to perform surgery with a higher level of accuracy than ever before and even perform surgeries in remote locations
It seems likely robots will continue to be instrumental in helping companies cope with the persistent welding skills shortage. This is a strong example of how technology can assist with overcoming factors that can’t always be easy to control or solve.
The SnowBot Pro is a self-driving, GPS-navigated robot that clears walks more efficiently than shovelers -- dramatically reducing labor costs for snow management operators. The Left Hand Robotics team’s deep expertise spans software, automation and robotics, and in 2018 the
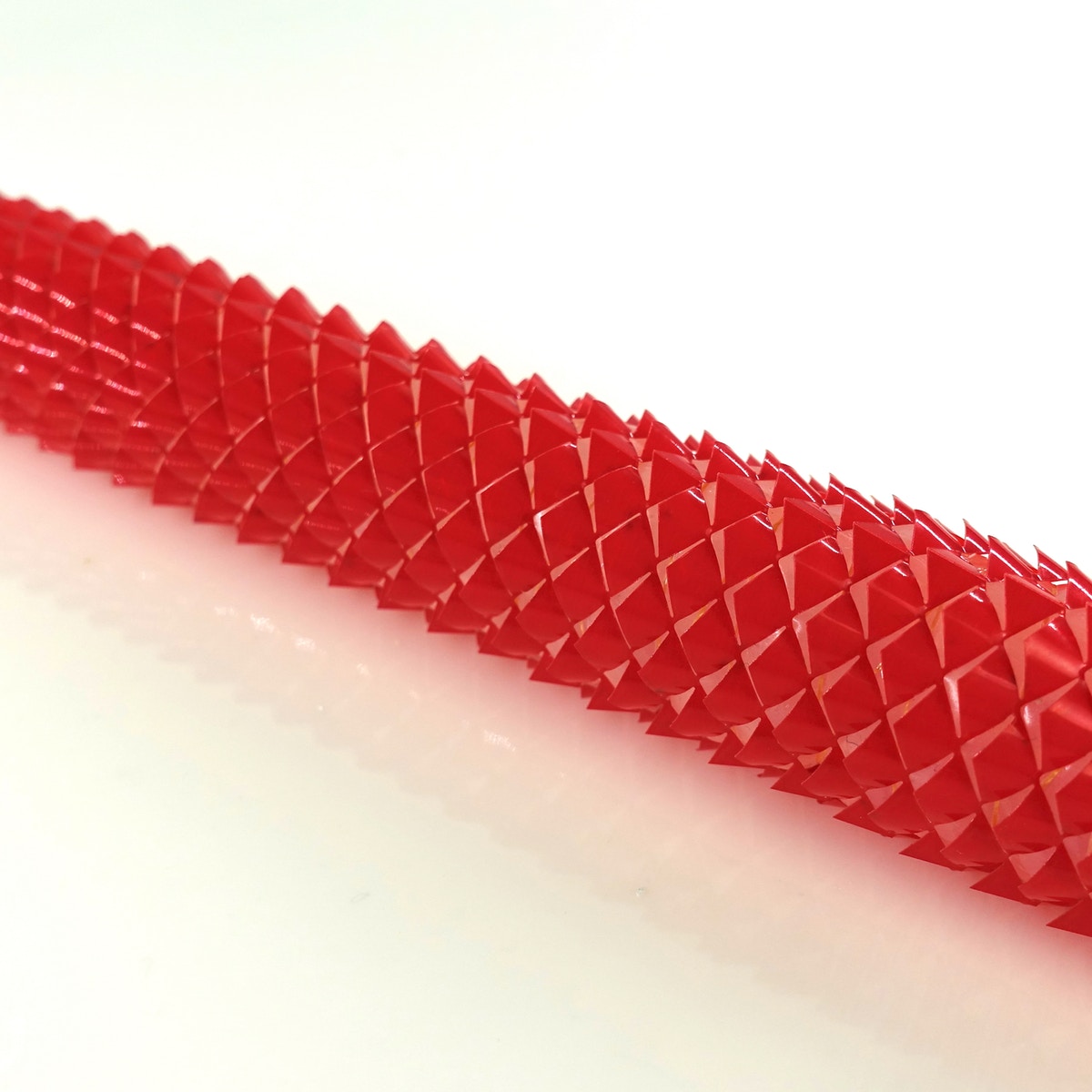
This soft robot is made using kirigami — an ancient Japanese paper craft that relies on cuts, rather than origami folds, to change the properties of a material. As the robot stretches, the kirigami is transformed into a 3D-textured surface. Credit: Ahmad Rafsanjani/Harvard SEAS
By Leah Burrows
Who needs legs? With their sleek bodies, snakes can slither up to 14 miles-per-hour, squeeze into tight spaces, scale trees, and swim. How do they do it? It’s all in the scales. As a snake moves, its scales grip the ground and propel the body forward — similar to how crampons help hikers establish footholds in slippery ice. This so-called “friction-assisted locomotion” is possible because of the shape and positioning of snake’s scales.
Now, a team of researchers from the Wyss Institute at Harvard University and the Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) has developed a soft robot that uses those same principles of locomotion to crawl without any rigid components. The soft robotic scales are made using kirigami — an ancient Japanese paper craft that relies on cuts, rather than origami folds, to change the properties of a material. As the robot stretches, the flat kirigami surface is transformed into a 3D-textured surface, which grips the ground just like snake skin.
“There has been a lot of research in recent years into how to fabricate these kinds of morphable, stretchable structures,” said Ahmad Rafsanjani, Ph.D., a postdoctoral fellow at SEAS and first author of the paper. “We have shown that kirigami principles can be integrated into soft robots to achieve locomotion in a way that is simpler, faster, and cheaper than most previous techniques.”
The researchers started with a simple, flat plastic sheet. Using a laser cutter, they embedded an array of centimeter-scale cuts, experimenting with different shapes and sizes. Once the sheet was cut, the researchers wrapped it around a tube-like elastomer actuator, which expands and contracts with air like a balloon.
When the actuator expands, the kirigami cuts pop out, forming a rough surface that grips the ground. When the actuator deflates, the cuts fold flat, propelling the crawler forward.
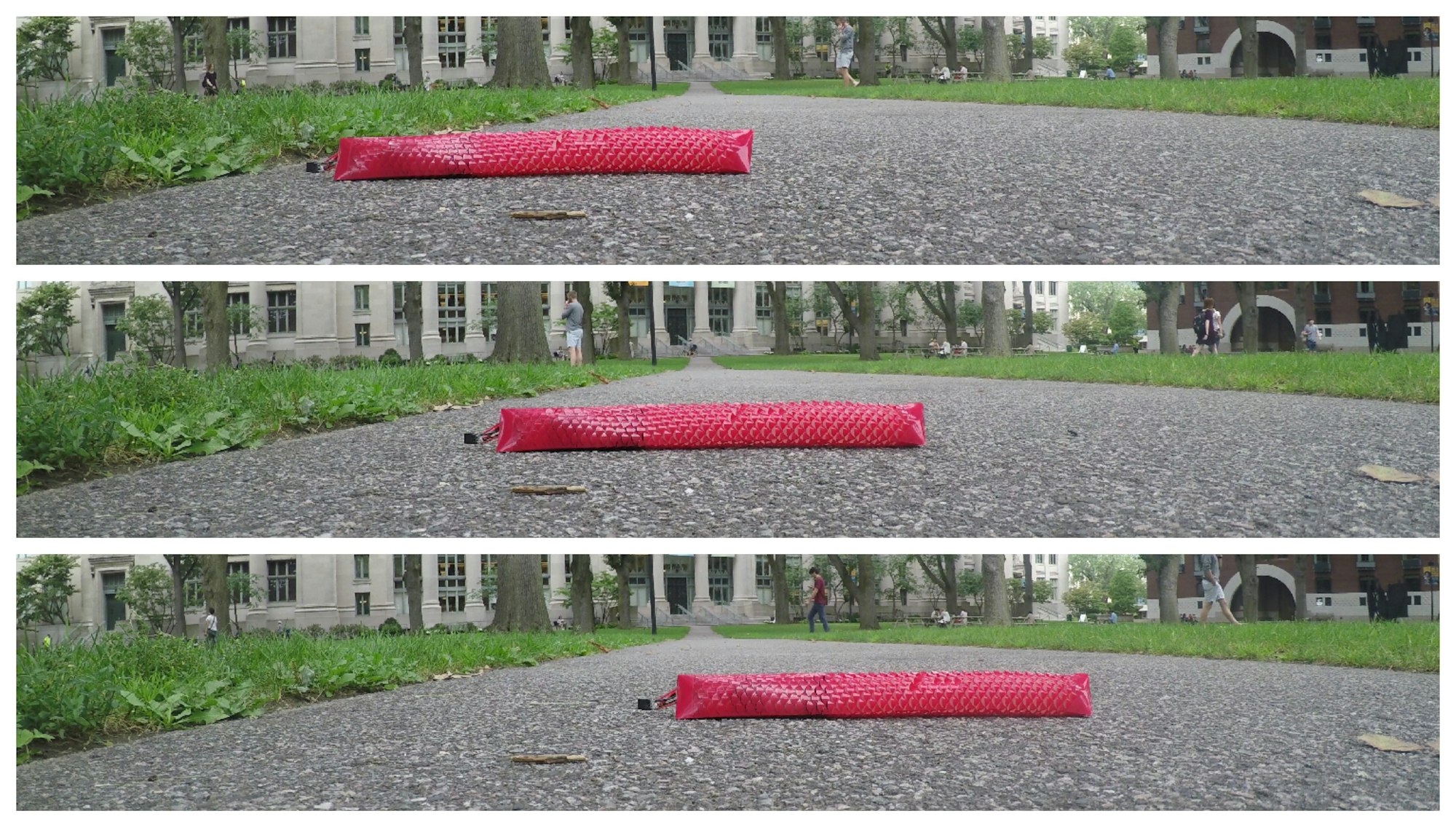
Wyss and Harvard researchers have built a fully untethered, soft robot, with integrated on-board control, sensing, actuation and power supply packed into a tiny tail. Credit: Ahmad Rafsanjani/Harvard SEAS
The researchers built a fully untethered robot, with its integrated on-board control, sensing, actuation, and power supply all packed into a tiny tail. They tested it crawling throughout Harvard’s campus.
The team experimented with various-shaped cuts, including triangular, circular, and trapezoidal. They found that trapezoidal cuts — which most closely resemble the shape of snake scales —gave the robot a longer stride.
“We show that the locomotive properties of these kirigami-skins can be harnessed by properly balancing the cut geometry and the actuation protocol,” said Rafsanjani. “Moving forward, these components can be further optimized to improve the response of the system.”
“We believe that our kirigami-based strategy opens avenues for the design of a new class of soft crawlers,” said the paper’s senior author Katia Bertoldi, Ph.D., an Associate Faculty member of the Wyss Institute and the William and Ami Kuan Danoff Professor of Applied Mechanics at SEAS. “These all-terrain soft robots could one day travel across difficult environments for exploration, inspection, monitoring, and search and rescue missions, or perform complex, laparoscopic medical procedures.”
This research was co-authored by Yuerou Zhang; Bangyuan Liu, a visiting student in the Bertoldi lab; and Shmuel M. Rubinstein, Ph.D., Associate Professor of Applied Physics at SEAS. It was supported by the National Science Foundation.
PhD student Adriana Schulz was co-lead on AutoSaw, which lets nonexperts customize different items that can then be constructed with the help of robots. Photo: Jason Dorfman, MIT CSAIL By Adam Conner-Simons and Rachel Gordon
In an effort to minimize injury and let carpenters focus on design and other bigger-picture tasks, a team from MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL) has created AutoSaw, a system that lets nonexperts customize different items that can then be constructed with the help of robots.
Users can choose from a range of carpenter-designed templates for chairs, desks, and other furniture. The team says that AutoSaw could eventually be used for projects as large as a deck or a porch.
“If you’re building a deck, you have to cut large sections of lumber to length, and that’s often done on site,” says CSAIL postdoc Jeffrey Lipton, who was a lead author on a related paper about the system. “Every time you put a hand near a blade, you’re at risk. To avoid that, we’ve largely automated the process using a chop-saw and jigsaw.”
The system also offers flexibility for designing furniture to fit space-constrained houses and apartments. For example, it could allow a user to modify a desk to squeeze into an L-shaped living room, or customize a table to fit in a microkitchen.
“Robots have already enabled mass production, but with artificial intelligence (AI) they have the potential to enable mass customization and personalization in almost everything we produce,” says CSAIL director and co-author Daniela Rus. “AutoSaw shows this potential for easy access and customization in carpentry.”
The paper, which will be presented in May at the International Conference on Robotics and Automation (ICRA) in Brisbane, Australia, was co-written by Lipton, Rus, and PhD student Adriana Schulz. Other co-authors include MIT Professor Wojciech Matusik, PhD student Andrew Spielberg, and undergraduate Luis Trueba.
How it works
Software isn’t a foreign concept for some carpenters. “Computer Numerical Control” (CNC) can convert designs into numbers that are fed to specially programmed tools to execute. However, the machines used for CNC fabrication are usually large and cumbersome, and users are limited to the size of the existing CNC tools.
As a result, many carpenters continue to use chop-saws, jigsaws, and other hand tools that are low cost, easy to move, and simple to use. These tools, while useful for customization, still put people at a high risk of injury.
AutoSaw draws on expert knowledge for designing, and robotics for the more risky cutting tasks. Using the existing CAD system OnShape with an interface of design templates, users can customize their furniture for things like size, sturdiness, and aesthetics. Once the design is finalized, it’s sent to the robots to assist in the cutting process using the jigsaw and chop-saw.
To cut lumber the team used motion-tracking software and small mobile robots — an approach that takes up less space and is more cost-effective than large robotic arms.
Specifically, the team used a modified Roomba with a jigsaw attached to cut lumber of any shape on a plank. For the chopping, the team used two Kuka youBots to lift the beam, place it on the chop saw, and cut.
“We added soft grippers to the robots to give them more flexibility, like that of a human carpenter,” says Lipton. “This meant we could rely on the accuracy of the power tools instead of the rigid-bodied robots.”
After the robots finish with cutting, the user then assembles the new piece of furniture using step-by-step directions from the system.
Democratizing custom furniture
When testing the system, the teams’ simulations showed that they could build a chair, shed, and deck. Using the robots, the team also made a table with an accuracy comparable to that of a human, without a real hand ever getting near a blade.
“There have been many recent AI achievements in virtual environments, like playing Go and composing music,” says Hod Lipson, a professor of mechanical engineering and data science at Columbia University. “Systems that can work in unstructured physical environments, such as this carpentry system, are notoriously difficult to make. This is truly a fascinating step forward.”
While AutoSaw is still a research platform, in the future the team plans to use materials such as wood, and integrate complex tasks such as drilling and gluing.
“Our aim is to democratize furniture-customization,” says Schulz. “We’re trying to open up a realm of opportunities so users aren’t bound to what they’ve bought at Ikea. Instead, they can make what best fits their needs.”
The project was supported in part by the National Science Foundation.
“We are demonstrating that it is possible to have a much better customer experience when robots and humans work together,” says Sam Blum, Community Manager at Cafe X.
Researchers at Harvard University have built soft robots inspired by nature that can crawl, swim, grasp delicate objects and even assist a beating heart, but none of these devices has been able to sense and respond to the world around them.
These embedded module solutions or COM are being used in an increasing number of drone applications because they allow for a greater degree of flexibility, scalability, as well as longevity, within a very small form factor.
The entire focus of this still quite new trade fair is on drones and unmanned systems, how they can be used to improve security, and also how to defend against these technologies in structures that are relevant from a security perspective.
The absence of required machine safeguarding remains a perennial member of OSHA’s Top 10 Most Cited Violations, and 2017 was no exception. It was named number eight on the list with a total of 1,933 violations.
Can a robot have a better bedside manner than a doctor? Perhaps. But a humanoid robot packed with the latest technology can certainly spend more time with a child in the hospital, become his or her confidant and utilize technological abilities that exceed humans.
Faye Flam for Bloomberg View: And in terms of gathering data, we can’t catch up to the robots, which have in recent years been plunging beneath Jupiter’s thick cloud cover and exploring the exotic moons of Saturn with their methane lakes and roiling ice geysers.