As it is clear that industrial robotics would continue to transform every sector in several ways, here are some of the prominent trends that would play a vital role in the coming years.
Each of the four types of collaborative robot operation permit varying amounts of interaction between people and robots. Based on the risk assessment, each type will also allow you to remove a portion or all of the safety fencing.
The traditional vision architecture is changing, with an evolution from cameras and sensors to networked and smart-enabled, compact embedded devices with the processing power required for real-time analysis.
The good news is that space-based exploration, travel and research are all ramping up not just at renowned organizations like NASA, but also at privatized operations such as Space-X and Made In Space.
The challenge is that traditional robots have been designed to perform a single task extremely efficiently. But when the item or the task changes these traditional machines need to be reintegrated and reprogrammed.
Full reference
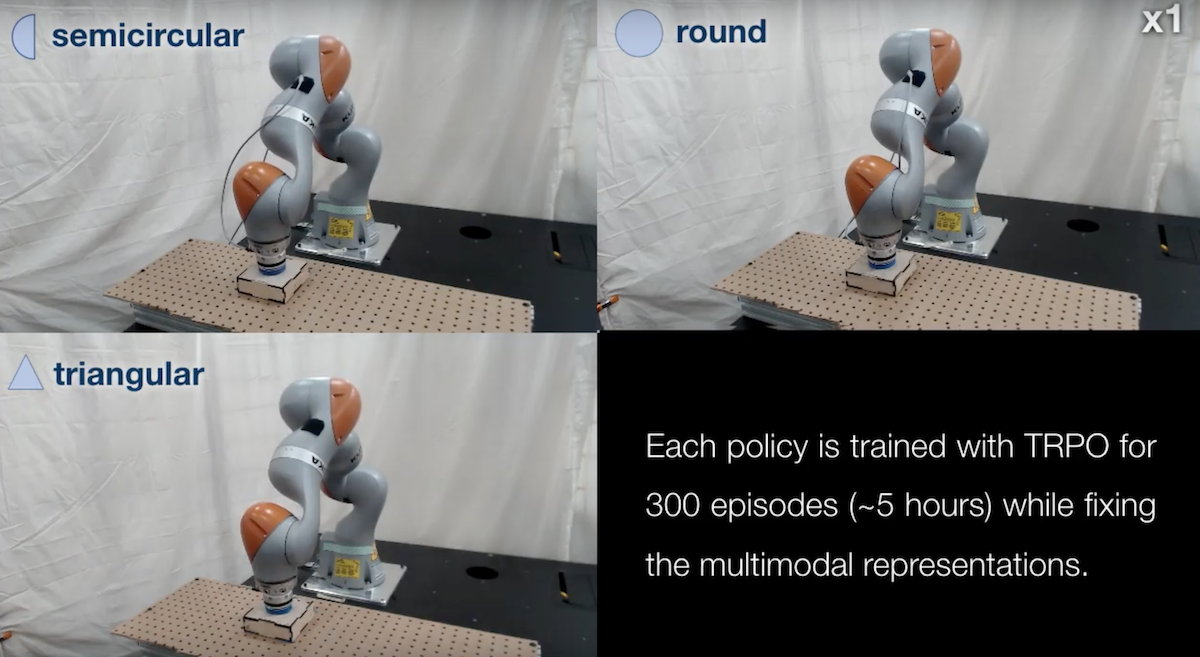
Lee, Michelle A., Yuke Zhu, Krishnan Srinivasan, Parth Shah, Silvio Savarese, Li Fei-Fei, Animesh Garg, and Jeannette Bohg. “Making sense of vision and touch: Self-supervised learning of multimodal representations for contact-rich tasks.” arXiv preprint arXiv:1810.10191 (2018).
Our concentration is to develop a surgical robot to go where it is needed the most, bringing the best competencies to where the injury happened. After all, if we can pilot a drone we should be able to operate a surgical robot.
The terms accuracy and repeatability are often used interchangeably. However, accuracy is not possible without repeatability, but repeatability is achievable without accuracy. There are other errors, too, non-linearity errors, and linearity errors caused by thermal effects.
In order for electrical vacuum generators, grippers and compact ejectors to be visible to the smart factory, they must provide digital energy and process data in real time.
Hirth Engines Head of International Business Development, Peter Lietz, highlights the importance for engine manufacturers to advance endurance capabilities of unmanned aerial vehicles (UAVs) in extreme terrains.
In France’s Bordeaux region, robots ensure that the wine is organically good. They autonomously eliminate grass and weeds between the vines, making pesticides unnecessary. To enable the robots to navigate the hilly terrain, the developers took some cues from Mars rovers.
AirBox Technology is a patented product invented by Mr. Pargoe to provide remote secure delivery access points to anyone in the world. Its core product, the AirBox Home, includes a proprietary Internet of Things (IOT) board capable of communicating with both service provider
In this episode, Lauren Klein interviews Michal Luria, a PhD candidate in the Human-Computer Interaction Institute at Carnegie Mellon University, about research that explores the boundaries of Human-Robot Interaction. Michal draws inspiration from the Medieval Times for her project to test how historical automata can inform modern robotics. She also discusses her work with cathartic objects to support emotional release.
Michal Luria
Michal Luria is a PhD candidate in the Human-Computer Interaction Institute at Carnegie Mellon University, advised by Professors Jodi Forlizzi and John Zimmerman. Michal’s research centers on exploring alternative ways for humans to interact with agents and social robots. Prior to her PhD, Michal studied Interactive Communication at the Interdisciplinary Center Herzliya in Israel.
In this episode of Robots in Depth, Per Sjöborg speaks with Federico Pecora about AI and robotics. Federico Pecora is Associate Professor in Computer Science at the Center for Applied Autonomous Sensor Systems at Örebro University, Sweden.

 Michal Luria is a PhD candidate in the Human-Computer Interaction Institute at Carnegie Mellon University, advised by Professors Jodi Forlizzi and John Zimmerman. Michal’s research centers on exploring alternative ways for humans to interact with agents and social robots. Prior to her PhD, Michal studied Interactive Communication at the Interdisciplinary Center Herzliya in Israel.
Michal Luria is a PhD candidate in the Human-Computer Interaction Institute at Carnegie Mellon University, advised by Professors Jodi Forlizzi and John Zimmerman. Michal’s research centers on exploring alternative ways for humans to interact with agents and social robots. Prior to her PhD, Michal studied Interactive Communication at the Interdisciplinary Center Herzliya in Israel. In this episode of
In this episode of