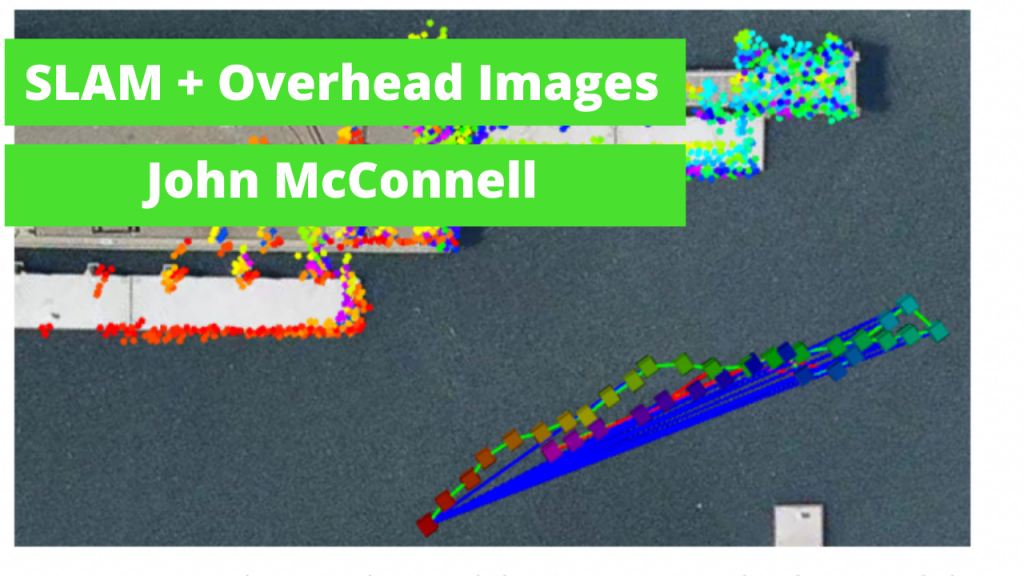
Underwater Autonomous Vehicles face challenging environments where GPS Navigation is rarely possible. John McConnell discusses his research, presented at ICRA 2022, into fusing overhead imagery with traditional SLAM algorithms. This research results in a more robust localization and mapping, with reduced drift commonly seen in SLAM algorithms.
Satellite imagery can be obtained for free or low cost through Google or Mapbox, creating an easily deployable framework for companies in industry to implement.
Links
- Download mp3 (12.2 MB)
- Sonar SLAM opensource repo
- Research Paper
- Subscribe to Robohub using iTunes, RSS, or Spotify
- Support us on Patreon