Have you ever seen a bridge collapse on TV? We only care about inspection and maintenance if it does not work. However, robotics are changing the inspection & maintenance landscape, and significant societal and political implications follow the magnitude of innovation. To pay due attention to these developments, the communication on innovation in robotics for inspection & maintenance has to play a role in informing and influencing the target groups for the successful adoption of robotics technologies.
The question on what role communications play in forming the perception of innovative technology was discussed in the workshop “Communicating innovation: What can we do better?” on May 25th, 2022. Experts explained how the innovation uptake should be supported by effective communication of innovations: explaining the benefits, tackling risks and fears of the audiences, and taking innovation closer to the general public.
Innovation & communication experts Marta Palau Franco and Juan Antonio Pavón Losada presented these topics in depth. Also, the recipe for successful innovation communication in robotics in inspection and maintenance was presented by Carlos Matilla Codesal, CEO of FuVeX.
Marta Palau Franco, project officer at euRobotics, working on digital innovation, presented how social context and perception can affect the way we communicate innovative technologies. For example, mentioning the word “drone” in 2014 and in 2022 may not bring the same images to mind to a person. This is due to changes in context and perception around the technology over the years, going from a more military-surveillance use to others such as logistics (e.g. Amazon shipping), entertainment (e.g. drone lights, filming, drone races, etc.), inspection & maintenance, agriculture, etc.
This example emphasizes that intentional engagement with the audience requires a good understanding of the different communication contexts (i.e. social, physical, cultural) and their perception or future expectations of the technology. How can we change someone‘s perception or expectations? We can do that by changing their current references or their interpretation of their prior references.
The people’s perception of innovation might not necessarily correlate with the technological level of innovation. Marta introduced how good and bad communication can create different impressions on the technology. She presented 4 scenarios depending on the level of technological innovation and perception of being innovative (by people) (see the picture below).
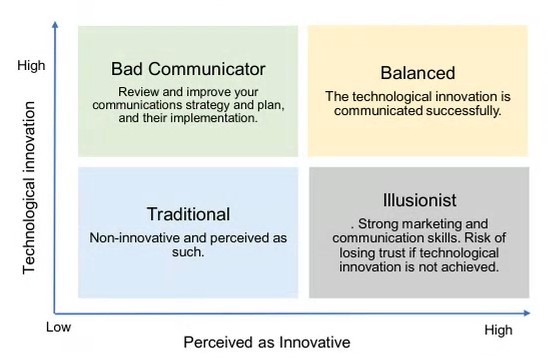
The Balanced scenario is where the company’s technological innovation is high and the company is perceived as such. When there is a high level of technological innovation, but the company is not perceived as innovative, we are in the scenario of the Bad communicator. Companies that find themselves in this group should review their communications and marketing strategy and plan. The scenario of the Illusionists presents a company with low technological innovation, but with strong communication and marketing skills.The company manages to raise audience’s expectations, but risks losing the audience’s trust if the technological innovation is not delivered.
To escape the trap of a bad communicator, whose message does not come across to the audience, Marta offered some advice:
- Be aware of your communication context(s).
- Do you know what people’s perception of your company and technology is? If the perception is negative, try to change it.
- Communicate strategically at different stages of technology development. Be flexible and adapt your communication strategy/plan when necessary. If you are in silence for a prolonged period, you are losing attention. Others will be filling in this gap.
-
Listen to feedback provided by your audience and value other perspectives. (e.g., surveys). Burst your bubble, and let in the external input.
-
Look for professional marketing and communications advice when needed. Take it seriously.
-
By communicating about your innovative technology, you are changing the social and cultural context, contributing to smoother (and safer) adoption of your technology.
-
Failure is part of the learning process.
The advice on building trust with stakeholders and communicating in a crisis was suggested by Juan Antonio Pavón Losada, a Project Manager Assistant at PRISMA Lab in the Department of Electrical Engineering and Information Technology at the University of Naples Federico II. Juan is working on the internal and external design and management of European projects’ communication and dissemination.
Juan presented what symptoms define inefficient communication. Firstly, the communication misses the point if it is not consistent and relies on minimal efforts, i.e., “checking the boxes”. In addition, the lack of a defined value proposition (communicating features and activities instead of value) and strategic positioning for the different audiences drives the communication astray from its goal.
How can we solve these mistakes and create efficient communication for inspection and maintenance? Juan has elaborated on the key concepts that are especially relevant in the field of inspection & maintenance. First, the goal of communication is to build relationships, not explain things. Trust, reliability and good reputation are the key goals. In the worst-case scenario, even when an accident happens, if the relationship with stakeholders is firm it will endure the crisis. The trust will absorb the impact of the issue. Also, sufficient attention to communication includes preparation for crisis – identifying who is eligible to speak? What would be the best channel to communicate? What should be the outputs: press release? Press conference? What would be the messages and possible consequences of the messages? Such preparation would help to react quicker and mitigate the crisis.
But, to build trust you need time. That means that the communication about your innovative solution has to be consistent and start early in the process. Apart from this, Juan proposed other tips for effective communication of innovation:
- To be an engaged listener, know the domain and stakeholders, and learn the domain-specific language.
- Express yourself clearly & constantly. Communication is like any relationship – don’t expect people to be there to hear you when you have time. Make some time and show up more than once each 6 months.
- Connect your content to the events happening in the world simultaneously.
- Get communication professionals to do the work and develop high-quality material.
- Engage in new collaborations & break the bubble of your organization to receive new inputs.
- Make intentional language choices and find a balance between technical language and superficial claims without evidence (see the picture below).
Even though robotics in inspection & maintenance seems to be a rather technical and hardly engaging field for the general audience, Juan encouraged the audience to pay substantial attention to communication in their projects. The due attention converts to allocated budget, planning efforts, strategic positioning, and consistency. However, the main idea for the communication in this field revolves around the TRUST, which is built among stakeholders, whether they are tech providers, projects, institutions, developers, politicians, citizens, etc.
FuVex is a practical example of the successful communication of innovative robotics solutions in inspection & maintenance. FuVeX is a start-up whose mission is to replace manned helicopters with long-range drones in power line inspection and other aerial data capture operations. Carlos Matilla Codesal, CEO and co-founder of FuVeX, highlighted the importance of the intent behind the communication – every word must serve to reach the goal, whether it is to raise awareness, attract investment or find clients. In addition, instead of talking about technical details, which might be the most exhilarating on earth for the developers and engineers, the communication must revolve around the problem you solve. In robotics, this problem is not obviously and easily relatable to the general public (compared to, for example, problems in medicine). However, the responsibility to identify this value proposition and story is not on the audience but the one delivering the message. Vanity is not a strategy. Do not get into the trap of doing things because it feels great but is not valuable for the company. If you are communicating to an audience that is neither your customer nor your investor, but it feels great at the end of the day, you are wasting the resources on the things that matter just to your ego.
The next workshop “Policy issues in Robotics for Infrastructure & Maintenance” will be held during the European Robotics Forum in Rotterdam. If you happen to participate in the Forum, you are welcome to join the workshop on June 29th, at 9.50am (CEST). The experts will discuss how AI regulation affects the domain of Robotics for Infrastructure and Maintenance, what direction the policy is moving to and what are the issues in the pan-European legislation.