By Hayley Dunning and Caroline Brogan
The prototype drone, called FireDrone, could be sent into burning buildings or woodland to assess hazards and provide crucial first-hand data from danger zones. The data would then be sent to first responders to help inform their emergency response.
The drone is made of a new thermal aerogel insulation material and houses an inbuilt cooling system to help it withstand temperatures of up to 200°C for ten minutes. Currently at prototype stage, the researchers believe FireDrone could eventually be used to scope out fires for people and extra hazards to bolster firefighting.
Principal Investigator Professor Mirko Kovac, Director of the Aerial Robotics Lab at Imperial College London and Head of the Laboratory of Sustainability Robotics at Empa, said: “Until they enter the danger zone, firefighters can’t be certain of what or who they’ll find, and what challenges they’ll encounter.
“FireDrone could be sent in ahead to gather crucial information so that responders can prepare accordingly to keep themselves safe and potentially save more lives.”
– Professor Mirko Kovac
Animal-inspired trailblazers
Drones are already used from afar in firefighting to take aerial footage, hoist fire hoses up skyscrapers, or drop fire retardant in remote areas to slow the spread of wildfires. However, current drones developed for firefighting are unable to fly much closer lest their frames melt and their electronics fail.
Based on interviews with firefighters, the researchers knew drones that could get much closer could help to prepare first responders for entering burning buildings or woodland. Drones equipped with cameras and carbon dioxide (CO2) sensors, for example, could provide crucial information about the layout and composition of fires.
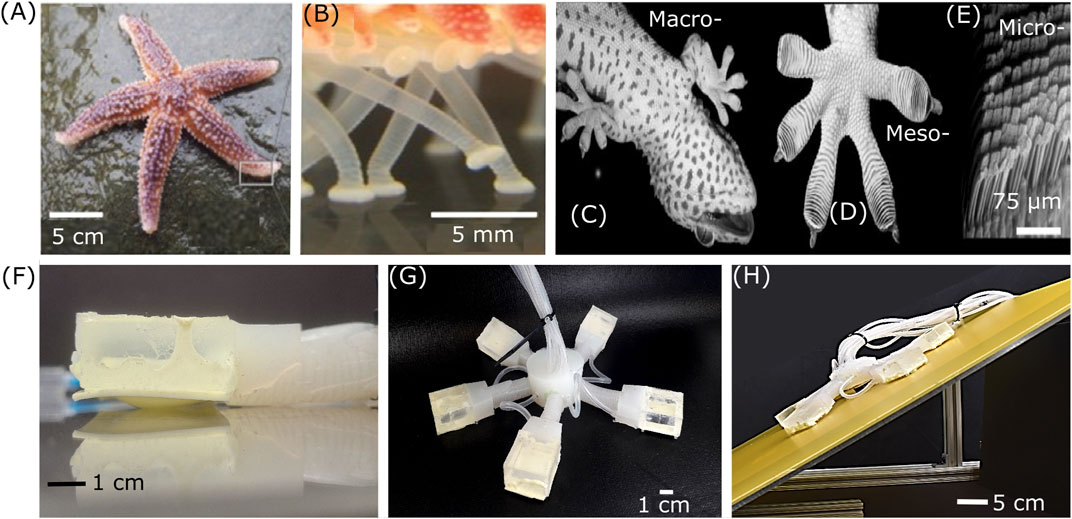
They looked to animals that live in extreme temperatures like the penguin, arctic fox, and spittlebug, for inspiration. All these have appropriate layers of fat, fur, or produce their own layers of thermoregulating material that allow them to thrive in extreme conditions.

Inside the drone, showing the layer of aerogel. Credit: Empa
To build the drone, they created a protective structural shell made of lightweight, thermally super-insulating materials like polyimide aerogel, and glass fibres. They coated this with super-reflecting aluminium to reflect heat. The super-insulation prevents the materials from shrinking and pore structures from degrading after exposure to high temperatures.
Within the protective exoskeleton, they placed the temperature-sensitive components, such as regular and infrared cameras, CO2 sensors, video transmitters, flight controllers, batteries, and radio receivers. They also used the release and evaporation of gas from the CO2 sensors to build a cooling system to keep temperatures down.
Temperature extremes
They tested the drone in temperature-controlled chambers and flew it close to flames at a firefighter training centre. They hope that their further work to miniaturise and add more sensors to the drone might lead to its deployment in real-life firefighting missions and help save lives.
FireDrone can also be used in extreme cold environments, in polar regions and in glaciers. The team has also tested the robot in a glacier tunnel in Switzerland to study how the system behaves in very cold temperatures.

FireDrone tested in a glacier
Although FireDrone is at prototype stage, the researchers say it is a step forward for the development of other drones that can withstand extreme temperatures and the team is now validating the technology with key industrial stakeholders and partners.
Professor Kovac said: “The application of drones is often limited by environmental factors like temperature. We demonstrate a way to overcome this and are convinced our findings will help to unleash the future power of drones for extreme environments”.
“Deploying robots in extreme environments provides great benefits to reducing risks to human lives, and who better to look to than animals that have evolved their own ways of adapting to these extremes using inspirating from how animals keep cool in heat.”
- PAPER – FireDrone: Multi-Environment Thermally Agnostic Aerial Robot.
David Häusermann, Sam Bodry, Fabian Wiesemüller, Aslan Miriyev, Severin Siegrist, Fan Fu, Sabyasachi Gaan, Matthias M. Koebel, Wim J. Malfait, Shanyu Zhao, and Mirko Kovač. Advanced Intelligent Systems (2023): 2300101.