Robot developments and the study of social processes can happen side-by-side in RoboHouse. Because we feel that technology should learn to look beyond its own horizons, if we aim to make the workplace more attractive. Why are people leaving the jobs they used to love? What’s going on in crucial sectors like healthcare, agriculture and manufacturing?
To explore these questions, we go into the field with scientists and innovators. Under the banner of FRAIM, our new transdisciplinary research centre dedicated to the future of work. What do robot specialists notice when they travel to places where people and robots work together?
Our latest instalment of FRAIM in the Field follows Maria Luce Lupetti as she meets with Henk Verdegaal on a grey November day. Last August Verdegaal, flower bulb farmer in the Netherlands, finally saw what an agricultural robot could do on his lands. The Agbot by developer AgXeed was humming along, managed by a “smart and ready to use autonomy system with a full suite of vehicle peripherals.”
As the Agbot demonstration progressed, flower bulb farmer Henk Verdegaal became more and more convinced of the potential of this particular way of implementing robotics: “I feel this could be deployed for all things related to light ground work. The only issue is: can the system run for enough hours to make it worthwhile financially. That seems hard at the moment.”
Henk Verdegaal experiments with smart technology to reduce his use of pesticides. He expects that systems like Agbot can also reduce his reliance on labour and liberate him from field work, so that he can focus on more important processes. Drones however, have so far failed to impress Verdegaal. Connectivity issues caused the drone to lose its way and communicate poorly with the camera.
Assistant professor Maria Luce Lupetti, specialised in critical design for AI systems at TU Delft, arrives at a sobering insight during FRAIM in the Field: “In a place like a farm there are clear problems like not finding people to drive the truck. So it automatically makes you think: ‘OK, you make it autonomous. You have a clear need for that, the technology is there.’ But there are reasons why people have a hard time finding workers. These problems are systemic. There are financial issues, there are sustainability issues. There is a pressing housing crisis that makes the price of the land rise. A lot of different forces are coming together to influence the work of people on a farm.”
Watch the rest of the series here, or on our youtube channel.
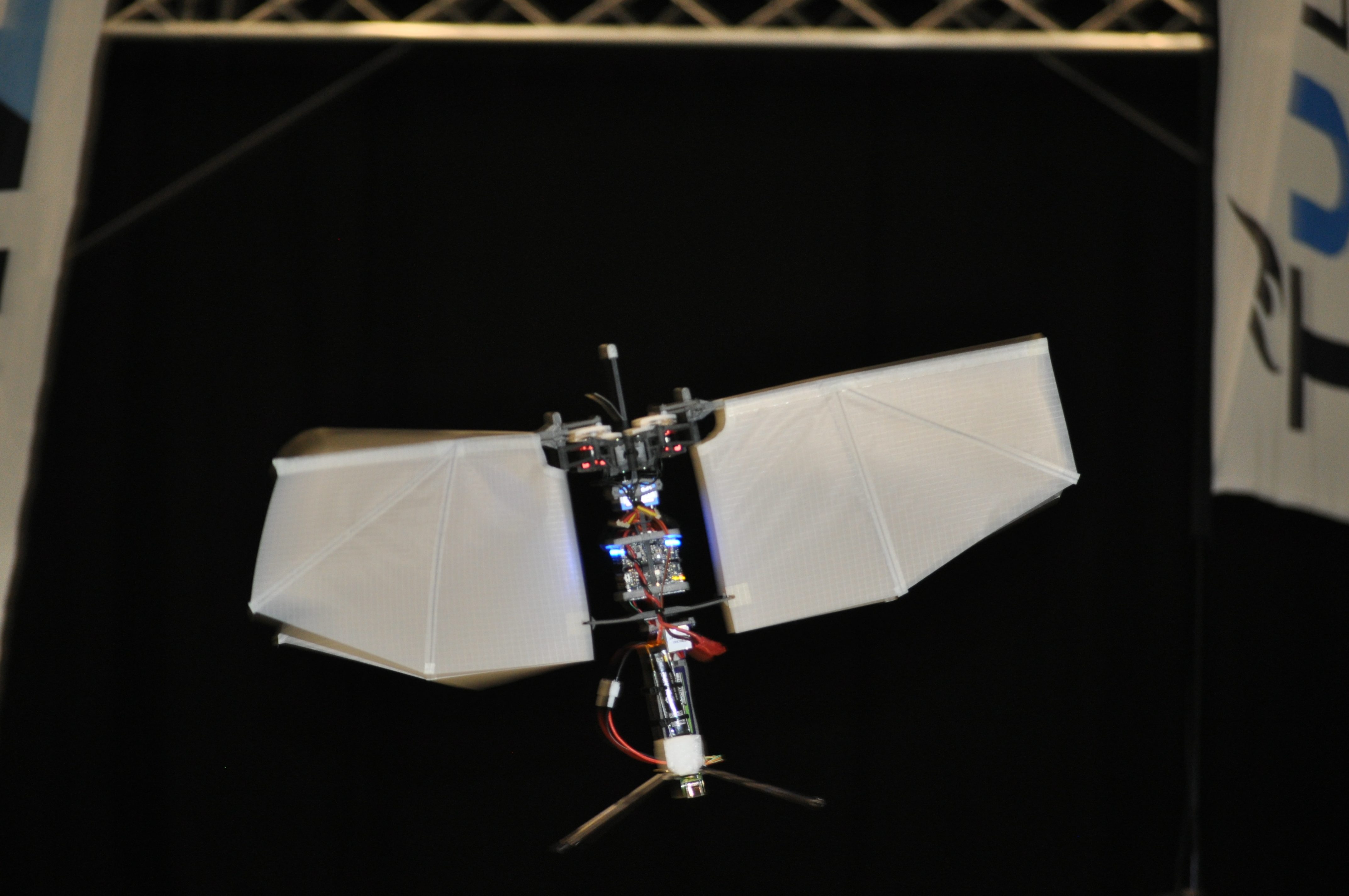
Scientists have developed a theory that can explain how flying insects determine the gravity direction without using accelerometers. It also forms a substantial step in the creation of tiny, autonomous drones.
Scientists have discovered a novel manner for flying drones and insects to estimate the gravity direction. Whereas drones typically use accelerometers to this end, the way in which flying insects do this has until now been shrouded in mystery, since they lack a specific sense for acceleration. In an article published in Nature, scientists from TU Delft and Aix Marseille Université / CNRS in France have shown that drones can estimate the gravity direction by combining visual motion sensing with a model of how they move. The study is a great example of the synergy between technology and biology.
On the one hand, the new approach is an important step for the creation of autonomous tiny, insect-sized drones, since it requires fewer sensors. On the other hand, it forms a hypothesis for how insects control their attitude, as the theory forms a parsimonious explanation of multiple phenomena observed in biology.
The importance of finding the gravity direction
Successful flight requires knowing the direction of gravity. As ground-bound animals, we humans typically have no trouble determining which way is down. However, this becomes more difficult when flying. Indeed, the passengers in an airplane are normally not aware of the plane being slightly tilted sideways in the air to make a wide circle. When humans started to take the skies, pilots relied purely on visually detecting the horizon line for determining the plane’s “attitude”, that is, its body orientation with respect to gravity. However, when flying through clouds the horizon line is no longer visible, which can lead to an increasingly wrong impression of what is up and down – with potentially disastrous consequences.
Also drones and flying insects need to control their attitude. Drones typically use accelerometers for determining the gravity direction. However, in flying insects no sensing organ for measuring accelerations has been found. Hence, for insects it is currently still a mystery how they estimate attitude, and some even question whether they estimate attitude at all.
Optic flow suffices for finding attitude
Although it is unknown how flying insects estimate and control their attitude, it is very well known that they visually observe motion by means of “optic flow”. Optic flow captures the relative motion between an observer and its environment. For example, when sitting in a train, trees close by seem to move very fast (have a large optic flow), while mountains in the distance seem to move very slowly (have a small optic flow).
“Optic flow itself carries no information on attitude. However, we found out that combining optic flow with a motion model allows to retrieve the gravity direction.”, says Guido de Croon, full professor of bio-inspired micro air vehicles at TU Delft, “Having a motion model means that a robot or animal can predict how it will move when taking actions. For example, drones can predict what will happen when they spin their two right propellers faster than their left propellers. Since a drone’s attitude determines in which direction it accelerates, and this direction can be picked up by changes in optic flow, the combination allows a drone to determine its attitude.”
The theoretical analysis in the article shows that finding the gravity direction with optic flow works almost under any condition, except for specific cases such as when the observer is completely still. “Whereas engineers would find such an observability problem unacceptable, we hypothesise that nature has simply accepted it”, says Guido de Croon. “In the article we provide a theoretical proof that despite this problem, an attitude controller will still work around hover at the cost of slight oscillations – reminiscent of the more erratic flight behaviour of flying insects.”
Implications for robotics
The researchers confirmed the theory’s validity with robotic implementations, demonstrating its promise for the field of robotics. De Croon: “Tiny flapping wing drones can be useful for tasks like search-and-rescue or pollination. Designing such drones means dealing with a major challenge that nature also had to face; how to achieve a fully autonomous system subject to extreme payload restrictions. This makes even tiny accelerometers a considerable burden. Our proposed theory will contribute to the design of tiny drones by allowing for a smaller sensor suite.”
Biological insights
The proposed theory has the potential to give insight into various biological phenomena. “It was known that optic flow played a role in attitude control, but until now the precise mechanism for this was unclear.”, explains Franck Ruffier, bio-roboticist and director of research at Aixe Marseille Université / CNRS, “The proposed theory can explain how flying insects succeed in estimating and controlling their attitude even in difficult, cluttered environments where the horizon line is not visible. It also provides insight into other phenomena, for example, why locusts fly less well when their ocelli (eyes on the top of their heads) are occluded.”
”We expect that novel biological experiments, specifically designed for testing our theory will be necessary for verifying the use of the proposed mechanism in insects”, adds Franck Ruffier.
Click here for the original publication in Nature. The scientific article shows how the synergy between robotics and biology can lead to technological advances and novel avenues for biological research.
Robots that move about by themselves must be able to adapt to the dynamic and challenging conditions in a supermarket. Hernández Corbato says: “My research focuses on using artificial intelligence to make machines smarter and more reliable by teaching them symbolic knowledge. The goal is to develop robotic ‘brains’ for intelligent robots that can be trusted to work alongside people, because they can explain their decisions.”
A supermarket is typically a place where unexpected things happen all the time. Not only are there thousands of products with different shapes and looks, there are also people walking in and out. How can an independently operating machine handle this safely, efficiently and intelligently? By activating symbolic knowledge that we humans also use, says Hernández. “We recognize a tray with four legs underneath as a symbol: ‘table’. We don’t need a photo for it. When we encode such ‘symbol language’ and make it suitable for robots, they can perform more complex tasks.”
Researcher Carlos Hernández Corbato of the Department of Cognitive Robotics in the retail lab at RoboHouse.
One look with its camera eyes and the robot knows it is facing an object on which plates and cups can be placed. Based on this, it can decide what to do. The acceleration that this produces, should enable robots to perform multiple actions at the same time: navigate, pick up and move objects, and ultimately communicate with people.
Symbolic knowledge
For Hernández, the AI for Retail Lab research program of supermarket chain Ahold Delhaize brings together everything that fascinates him about artificial intelligence. Retail requires robots to use a broad diversity of skills: to perceive the environment, navigate around it, manipulate objects or collaborate with humans. For him, it’s all about the question of which algorithms are needed to make a machine respond just as intelligently as a human brain. As a specialist in software for autonomously operating robots, he already won the Amazon Picking Challenge in 2016 with a team from TU Delft. At this occasion a robotic arm placed products from a container in their place on a shelf.
“Retail requires robots to use a broad diversity of skills: to perceive the environment, navigate around it, manipulate objects or collaborate with humans.”
– Carlos Hernández Corbato, researcher
The ‘supermarket robot’ is even more challenging. It requires the leap from a static factory environment to the dynamics of a store. The traditional way, in which robots learn from the data they collect, is too cumbersome for that. The robot would already get stuck in stock management. Programming a customized robot treatment for every orange, bottle, soup can, milk carton or cucumber would be too much work. “We want to inject symbolic knowledge into the robot’s operating system all at once,” says Hernández. “If that knowledge is available, the robot can continuously adapt to his changing environment. For example, by downloading a different hand movement.”
The robot must be able to independently choose a different algorithm if it encounters a problem along the way. So that he can pick up a can that falls from his hands, or change the grip of his hand slightly when picking up an unknown object. The technicians have already set up a test shop where robot ‘Tiago’ can practice with it. In about five years’ time, it should deliver a machine with a mobile base, two arms and two camera eyes, which independently refills supermarket shelves 24 hours a day. And it must be able to do that under all circumstances, day and night.
Sensor broken
The latter does not only apply to the supermarket robot. In fact, every robot should have a next generation operating system to better cope with changing circumstances. Hernández Corbato: “Beyond integrating different robot skills, cognitive skills for robots need to enable them to reason about those skills, to understand how they can use them, and what are the consequences of their own actions. In sum, we need to endow robots (or any intelligent autonomous system build) with self-awareness so that we can trust them.”
“We need to endow robots (or any intelligent autonomous system build) with self-awareness so that we can trust them.”
– Carlos Hernández Corbato, researcher
It is the core idea behind the European project Metacontrol for ROS2 systems (MROS) that the Cognitive Robotics department recently completed. The AI technique that Hernández used for this is called the metacontrol method. It describes the properties and skills of the robot in a structured way, so that the robot can use the knowledge to adapt and overcome problems.
As part of this research, he developed multiple prototypes of these next generation robots together with Bosch Corporate Research, Universidad Rey Juan Carlos, Universidad Politecnica de Madrid and IT University in Copenhagen.
Does it perform better than traditional robots? “Yes, he navigated more safely and, thanks to its symbolic knowledge, was able to adapt to the circumstances. When one sensor broke, it switched to another independently,” says Hernández enthusiastically. “That is where we want to go to: a robot with sufficient intelligence to deal with failures.”
(in the middle) Corrado Pezzato, PhD candidate at AIRLab , (right) Stefan Bonhof, research engineer and project manager at AIRLab in RoboHouse.
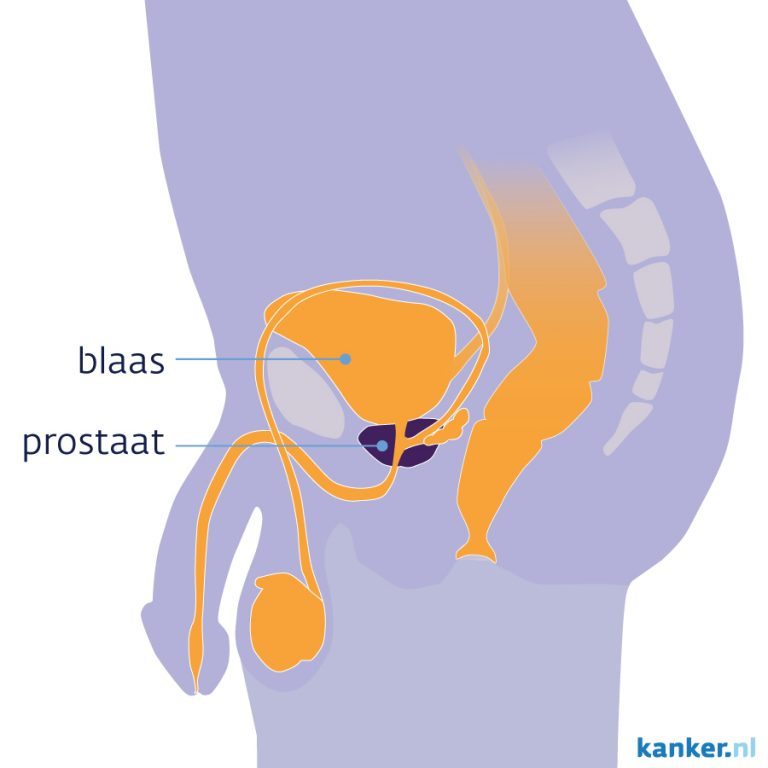
Prostate cancer is the most common form of cancer in men. Every year about 13,000 Dutch men are diagnosed with this disease. According to the Prostate Cancer Foundation, about 1 in 10 men suffers from prostate cancer at some point in their lives.
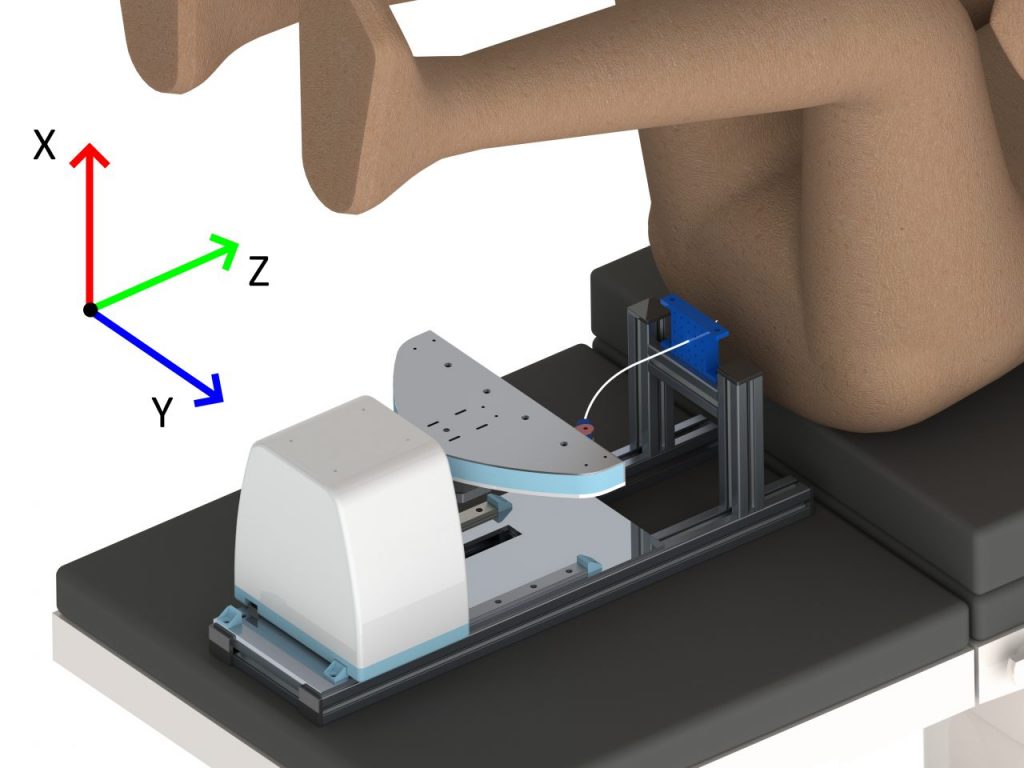
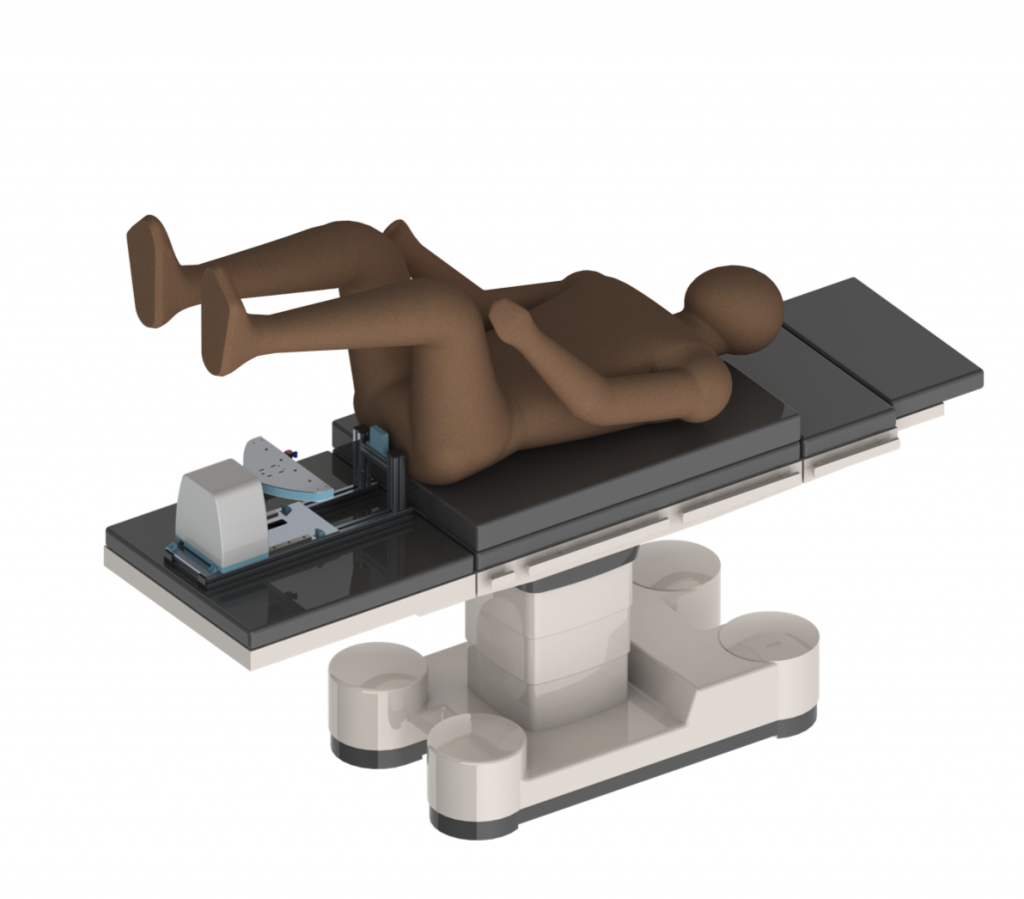
When an all-male TU Delft student team started working with PhD researcher Martijn de Vries to design a robot that can precisely place a radiation source in your body with a steerable needle, it took a while for these statistics to sink in. But once that happened, motivation shot up.
TU Delft bachelor student Pepijn van Kampen, mechanical engineering, collaborated with fellow students Rolf Bavelaar, Niels Dee, Tetsuo Martynowicz and PhD supervisor Martijn de Vries to improve the current medical procedure for treating prostate cancer.The steerable needle tries to overcome the limited effectiveness of current straight needles, which are hampered by obstacles and limited reach in area of the body that holds the prostate.
Pepijn van Kampen, mechanical engineering student and minor robotics graduate, says: “The first six months we spent on researching literature. Then we began to actually build our robot. And we started to wonder: are we going to see this robot again when we are 60 years old?”
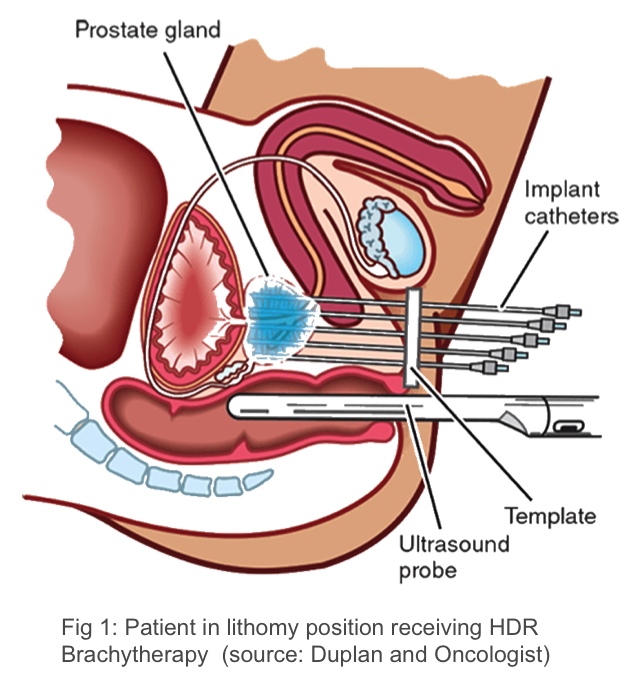
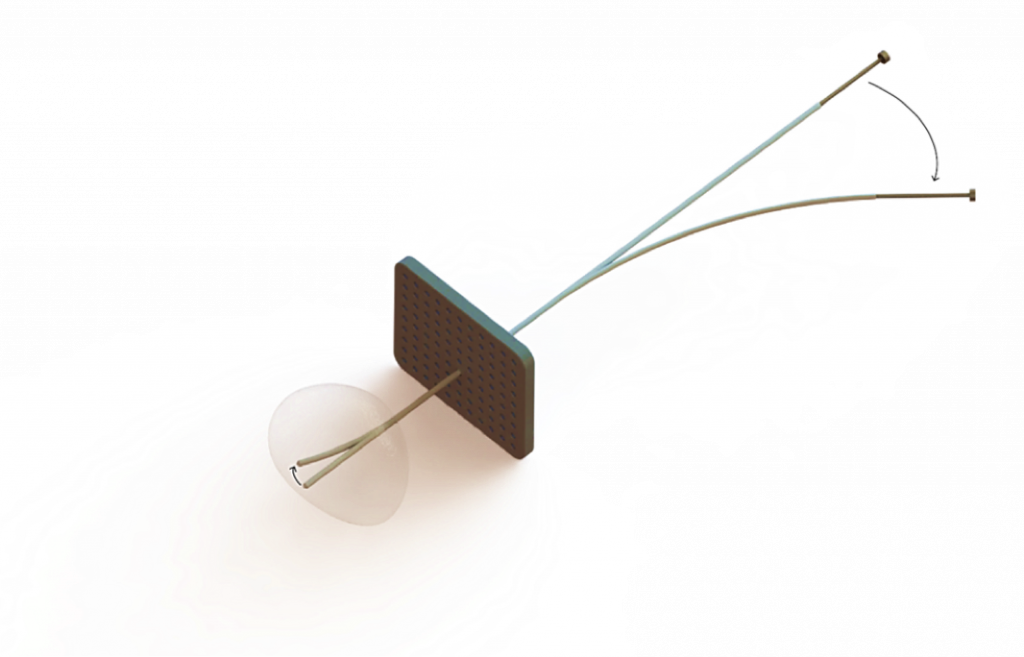
Current Brachy therapy uses straight needles to reach the prostate and place radioactive material close to a tumor. This method is not always accurate, which may damage healthy tissue and can result in less intense treatment of the tumor. It also leads to additional attempts to get it right, which additional harm to the body.The steerable needle deploys robotic assistance to, potentially, improve precision and control.
For a tumor located in the prostate, serveral treatments are availabe: surgery to remove the prostate, internal radiation therapy — also called brachytherapy or seed implantation – and external radiotherapy, which uses a machine outside the body to direct radiation beams at the cancer.
Brachytherapy places seeds, ribbons, or capsules that contain a radiation source near the tumor. It delivers a high dose of radiation directly to the tumor and helps spare nearby tissues. The treatment is most frequently applied to the prostate. It is also used to treat cancers of the head and neck, breast, cervix and eye.
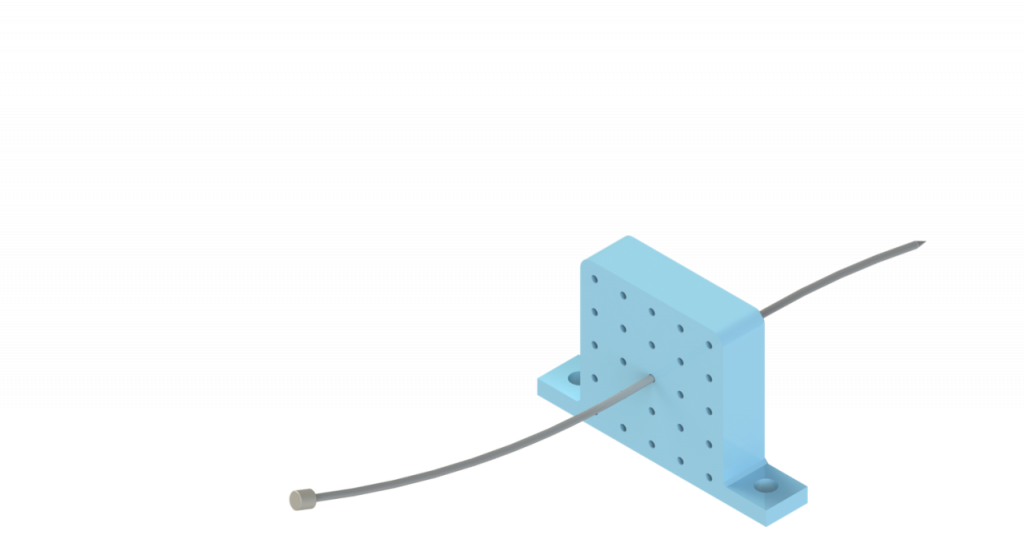
Brachytherapy is put in place through a catheter, which is a small stretchy tube. Current treatment of prostate cancer uses a straight, inflexible needle. This method is not always accurate. “The flexible needle designed by Martijn de Vries has four segments, enabling the surgeon to steer the tip in a range of directions,” says Pepijn van Kampen, of the Steerable Needle Project. “Our robotic system aims to enhance and augment its steering precision, like with power steering in a car. And this works, in principle. Needle buckling is still a challenge. ”
The Steerable Needle Project has received high ratings. The student team graduated cum laude from their bachelor programme. For less needle buckling and more control, they recommend some form of feedback loop in combination with high end visualisation like Magnetic Resonance Imaging (MRI). Accurate robotic control may also depend on predictive models to guide the interaction between needle and patient tissue. Because that is also how a surgeon’s hand-eye coordination works: our human body makes predictions that enable us to intervene in the world with agility and speed, apparently without the cumbersome calculations and feedback loops that most robots still rely on.
Intrigued? Follow Martijn de Vries, and his fellow collaborators to see where this project heads next.
Normally, students and scientists walk here, but today a drone is flying through a corridor on TU Delft Campus. Seemingly effortlessly, it whizzes past and between a variety of obstacles: rubbish bins, stacked boxes and poles. But then suddenly a person appears, walking straight towards the drone in the same space. This is not a stationery object but an actual moving person. ‘This is much more difficult for the drone to process. Because how fast is someone moving and are they going to make unexpected movements?’ asks Javier Alonso-Mora. This goes well too. As the drone approaches the walker, it moves to the side and flies on. The flying robot completes the obstacle course without a hitch.
This experiment, conducted by Alonso-Mora and his colleagues, is a good reflection of their research field. They investigate mobile robots that move on wheels or fly through the air and take their surroundings into account – which is why they can move safely alongside us in a corridor, room or hallway.
The new generation of robots that we’re now developing work with people and other robots. Dr. Javier Alonso Mora
That’s something new. For decades, robots were mainly used in factories, where they were separated from people and could assemble cars in a screened-off area or put something on a conveyor belt, for example. ‘The new generation of robots that we’re now developing work with people and other robots. So they have to take into account how others behave. They deliver packages, for example, or cooperate by assembling or delivering something. Moreover, they’re not fixed but can move freely in space,’ he says.
Adapting at lightning speed
For this to work, it’s important that the robots always make the right decision. This is achieved based on models that the scientists, including Alonso-Mora, are currently developing. ‘They perceive their environment on the basis of these models. It helps them to complete a task safely,’ he says.
Humans are highly skilled at this. We’re masters at correctly predicting what will happen and avoiding other people in time or adjusting our route accordingly to avoid a collision if things don’t happen as predicted after all. Busy intersections in major cities are good examples. Cyclists, cars, pedestrians, scooters, trams and trucks weave in and out of each other. It looks chaotic, but usually goes smoothly. ‘This is more difficult for a robot. It has to constantly predict what action is safe. There are many potential outcomes, and the robot has to calculate the various permutations. That takes time. Humans, on the other hand, have so much experience that we can assess a situation at lightning speed and adapt immediately if necessary. Our models are trying to achieve the same with robots.’
It’s important that the robots that complete difficult tasks work as well and safely as possible. Dr. Javier Alonso Mora
An interesting example of Alonso-Mora’s research is the Harmony project he’s working on. Scientists are developing robots that help nurses, doctors and patients. For example, they bring food to patients in bed or medicine to nurses. ‘They need to calculate the best route and how to behave on the way. How do they safely navigate an area with a moving bed, a patient on crutches or a surgeon who’s in a hurry?’
Testing the robots in hospitals
Not only do the robots have to cover small distances, but they also have to open doors and plan a route. Moreover, it’s important that they understand whether their task needs to be carried out quickly or can wait a while. ‘So the robots have to process a great deal of information, and on top of that, they have to analyse their environment and work with people and other robots. We’ve just launched this international project, and our goal is to start using demonstration robots in hospitals in Switzerland and Sweden in three years’ time. We’re creating and testing the algorithm that will allow the robots to move safely.’
It’s no coincidence that Alonso-Mora is working on this particular project. He was already fascinated by robots as a young boy. ‘I used to love playing with Lego; I could spend hours building things with it. We’re now doing something similar with robots, but in a more complicated way, because they too consist of many different parts. I’m interested in whether we can make the robots of the future intelligent. As a child, I loved reading Isaac Asimov’s science fiction, which often featured robots. The novel I, Robot, which was made into a film starring Will Smith, is a good example. It’s fiction, of course, but increasingly we’re getting closer to robots that are smart and can work with us. Whether they’re autonomous cars, drones or robots moving around in hospitals. It’s important that the robots that complete difficult tasks work as well and safely as possible.’
Dutch brewing company Heineken is one of the largest beer producers in the world with more than 70 production facilities globally. From small breweries to mega-plants, its logistics and production processes are increasingly complex and its machinery ever more advanced. The global beer giant therefore began looking for robotics solutions to make its breweries safer and more attractive for employees while enabling a more flexible organisation.
The environment is constantly changing and the robot has to be able to respond immediately.
Shobhit Yadav, mechatronics engineer smart industries and robotics at TNO
Automatically adapting to the situation
Dennis van der Plas, senior global lead packaging lines at Heineken, says, “We are becoming a high-tech company and attracting more and more technically trained staff. Repetitive tasks – like picking up fallen bottles from the conveyor belt will not provide them job satisfaction.” As part of the SMITZH innovation programme, Heineken and RoboHouse fieldlab, with support from the Netherlands Organisation for Applied Scientific Research (TNO), have developed a solution on the basis of flexible manufacturing: automated handling of unexpected situations.
According to Shobhit Yadav of TNO, flexible manufacturing is one of the most important developments in smart industry. “Today, manufacturing companies mainly produce small series on demand. It means that manufacturers have to be able to make many different products. This can be achieved either with a large number of production lines or with a small number that are flexible enough to adapt.” The Heineken project fell into the second category and involved developing a robot that could recognise different kinds of beer bottles that had fallen over on the conveyor. The robot had to pick them up while the belt was still moving. “The environment is constantly changing and the robot has to be able to respond immediately”, explains Shobhit. “This is a typical example of a flexible production line that automatically adapts to the situation.”
Robotics for a safe and enjoyable working environment
Industrial robots have obviously been around for a while. “The automotive industry deploys robots for welding car parts, whereas our sector uses them for automatically palletising products”, says Dennis. “But with this project we took a different approach. Our starting point was not a question of which robots exist and how they could be used. Instead, we focused on the needs and wishes of the people in the breweries, the operators who control and maintain the machines and how robots could support them in their work.”
The solution, in other words, had to lead not only to process optimisation but also – especially – to improved safety and greater job satisfaction. In addition, it would result in Heineken becoming a better employer. It is why Dennis and his colleague Wessel Reurslag, global lead packaging engineering & robotics, asked the operators what they would need to make their work safer and more interesting. One of the use cases that emerged was picking up bottles that had fallen over on the conveyor belt: repetitive but also unsafe as the glass bottles could break.
The lab is the place to meet for anyone involved in robotics.
Wessel Reurslag, global lead packaging engineering & robotics at Heineken
Dennis van der Plas, senior global lead packaging lines at Heineken, has a single minded focus: “Our first priority is to keep our people safe.”
Experimenting without a business case
Heineken initially made contact with RoboHouse field lab through a sponsorship project with X!Delft, an initiative that strengthens corporate innovation and closes the gap between industry and Delft University of Technology. “The lab is the place to meet for anyone involved in robotics”, says Wessel. “It is also linked to SMITZH and thus connected to TNO.”
The parties soon realised that their ambitions overlapped. Heineken was seeking independent advice and both TNO and RoboHouse were looking for an applied research project that focused on flexible manufacturing. “This kind of partnership is very valuable to all involved”, says Shobhit. “SMITZH allows us at TNO to work with current issues in the industry and establish valuable contacts, which makes our research more relevant. In turn, manufacturers have somewhere to go with their questions and problems regarding smart technologies.”
Accessible way to do research and experiment
The guys at Heineken have nothing but praise for the innovative collaboration with TNO and RoboHouse. Dennis says, “The great thing is that all project partners were in it to learn something. At RoboHouse, we had access to the expertise of robotics engineers and state-of-the-art technologies like robotic arms. We supplied the bottle conveyor ourselves and TNO also added knowledge to the mix. It is an accessible way to do research and experiment. This would be a lot more difficult with a business case, which must involve an operational advantage from the start.”
Through close cooperation, we really developed a joint product.
Bas van Mil, mechanical engineer and robot gripper expert at RoboHouse
A joint product by TNO and RoboHouse
TNO and RoboHouse distilled two research goals from the use cases presented by Heineken: enabling real-time robot control and using vision technology to direct the robots with cameras. The main challenge involved devising a solution that could be applied to Heineken’s high-speed packaging lines. TNO worked on the control and movements of the robot, while RoboHouse took on the vision technology aspect. This entailed recognising the fallen bottles, developing the system’s software-based control and building the ‘gripper’ to pick up the bottles.
In many existing robotic systems, […] the robot will do a ‘blind pick.’
Bas van Mil, mechanical engineer and robot gripper expert at RoboHouse
“Communication between the robot and the computer is very important”, explains Bas van Mil, mechanical engineer at RoboHouse. “Our input and TNO’s work were complementary. For example, RoboHouse did not possess Shobhit’s knowledge of control technology, which is indispensable for controlling the robot. Through close cooperation, we really developed a joint product.”
Every millisecond counts
The biggest challenge in detecting and tracking fallen beer bottles is that they never stop moving. As Bas explains, “They do not just move in the direction of the bottle conveyor but can also roll around on the belt itself. In many existing robotic systems, the camera takes a single photo that informs the movements of the robot. The robot will do a ‘blind pick’ with no way of knowing whether anything has changed since the photo was taken. This only works if the environment stays the same – but in this case, it doesn’t.”
The solution involves a system in which the camera and the movements of the robot are constantly connected to each other. Bas says, “Every millisecond counts as the bottle will disappear from view and the robot will still try to pick it up from the spot where it was half a second ago.” A RoboHouse programmer developed the camera software to be as fast and efficient as possible. The field lab even purchased a powerful computer running an advanced AI system especially for the project.
Shobhit Yadav, mechatronics engineer smart industries and robotics at TNO, was crucial for the controlling the robot.
We are receiving feedback as well as requests for the new robotic systems from breweries all over the globe.
Dennis van der Plas, senior global lead packaging lines at Heineken
TNO and RoboHouse then wrote a programme together that determines the speed of the robot from the moment a fallen bottle is detected. This enables the robot to move with the bottle based on its calculated speed. It is what makes this robot so different from existing ones. “The robot responds immediately to changes”, says Shobhit. “In fact, it is 30 per cent faster than the current top speed of Heineken’s bottle conveyors. As a result, it has a wide range of applications and can be used in a variety of environments with different production speeds.”
Smarter thanks to independent partners
Heineken valued not just the successful innovation but also the independent character of TNO and RoboHouse during the development process. Dennis says, “We now have a much better idea of what is technically feasible, what the challenges are and what we can realistically ask of our technical suppliers. Thanks to this project, we can act much more like a smart buyer and make smarter demands of our suppliers. This information is relevant to have, especially as we operate in such an innovative field where we do not just buy parts off the shelf. After all, if I ask too little, I will not get the best out of my project. But if I ask too much, it affects our relationship with the supplier.”
The project has also served as a source of inspiration for Dennis’s colleagues worldwide. “We have been sharing videos and reports from SMITZH on the intranet, building a kind of community within Heineken. We are receiving feedback as well as requests for the new robotic systems from breweries all over the globe.” To meet the demand, Dennis and Wessel want to supply breweries with a ready-to-use version. “We are currently looking for parties that can make the technology available and provide support services.”
Wessel Reurslag, global lead packaging engineering & robotics at Heineken, is already looking for the next step: “A robotic solution that is plug-and-play, flexible and easy to integrate in the brewery.”
Meanwhile, RoboHouse and TNO aim to continue optimising the robot. “This is only the pilot version”, says Bas. “We can still improve its flexibility, for example by installing a different vision module, thereby making the technology even more widely applicable.” Both organisations are therefore looking for use cases in which they can use the same technology to solve other problems. “We are looking at the bigger picture”, explains Shobhit. “This project could serve as a model for similar challenges in other industries.”
Platform for valuable connections
All parties emphasise the benefits of working together and sharing knowledge to achieve a successful and relevant innovation. “There are very few places like SMITZH where manufacturing companies can go with these kinds of questions”, says Shobhit. “SMITZH is quite unique in that sense and is vitally important because it offers a specific platform for appropriate collaborations.” Wessel agrees: “If there is one thing this project has made clear, it is that producers like Heineken, tech companies and knowledge institutions should collaborate more intensively to substantiate these kinds of projects. You won’t find a solution in a PDF or a presentation. There can be no genuine solution until it is made real and put into practice.”
Do you have a similar use case and are you, like Heineken, searching for a practical solution? Or would you first like to learn more about RoboHouse or this specific project? Feel free to contact our lead engineer Bas van Mil, or email SMITZH with questions about its collaboration programme, or contact Shobhit Yadav at TNO more information.
SMITZH and future of work fieldlab RoboHouse SMITZH is an innovation programme focused on smart manufacturing solutions in West Holland. It brings together supply and demand to stimulate the industrial application of smart manufacturing technologies and help regional companies innovate. Each SMITZH project consists of at least one manufacturing company and a fieldlab. RoboHouse served as the fieldlab in this project.
Combining drone imagery with weather data and planting schemes to forecast how much fresh vegetables a harvest is going to yield; that’s what predictive modelling intern Berend Klaver from TU Delft is sweating on at VanBoven, while his bosses are entertaining the American west coast.
VanBoven is one of the ten winners of the Academic Startup Competition 2020, currently on tour in Silicon Valley for a 4-week incubator programme.
“The market of fresh vegetables is one of constant shortages and surpluses. VanBoven predicts the harvest of fresh produce to perfectly align supply and demand. The result is decreased food waste, a resilient value chain and fair prices,” says the startup on its website.
The result is decreased food waste, a resilient value chain and fair prices.
So this firm from The Hague does not favour any particular party in the value chain, even though we do get a sense that it may have special empathy for farmers. What’s unique about the robot-powered predictions made by Klaver and his colleagues, is their cooperative deployment. The models are being used to foster symbiotic relations between all players in the system: growers of fresh vegetables, distributors and processors, agricultural service providers and retailers too. These parties can now all work together to anticipate fluctuations and coordinate a joint response to the unpredictability of nature and markets.
A refreshing proposition that could point towards a more positive future of work.
As an alternative to cutthroat, winner-takes-all capitalism, it seems a refreshing proposition that could point towards a more positive future of work. Maybe today’s tech startups from The Netherlands are not just soaking up insights during their missions to Silicon Valley, but are dishing them out too. ‘How Dutch-style Cosiness Breeds Resilience and Wellbeing’; we can already picture that headline in WIRED.
The Academic Startup Competition is an initiative of the Association of Universities in the Netherlands (VSNU), the Netherlands Academy of Technology and Innovation (AcTI), the Netherlands Federation of University Medical Centres (NFU) and Techleap.nl. It is also supported by the Ministry of Economic Affairs and Climate Policy.
The competition aims to highlight the importance of valorisation in the academic world. In addition to a Silicon Valley tour hosted by Holland in the Valley, an ecosystem for Dutch entrepreneurs in the San Francisco Bay Area, the winners are also being showered with perks such as introductions to networks, coaching programmes and the right to carry the title ‘Best Academic Startup of 2020’.
Multidisciplinary teams of minor students have designed and built a functional robotic prototype for a project customer with a challenge to improve the lives of working people. Streaming live from RoboHouse on the TU Delft Campus, you can join a virtual celebration of ideas en technology with some of our communities finest talent.
How does it work?
On Thursday 28 January 3pm (CET) you can visit the streaming website that we have created for the occasion. There you will find live video streams for a programme with a project overview and demonstrations by each student team. This all happens between 3pm and 4:30pm.
Our hosts will be running around RoboHouse for you, going from robot to robot and from team to team, followed by highly mobile camera people, all with the purpose of giving you the most intimate and direct experience. We want you feel as if you are able to touch the robots yourself.
After toasting on another successful Demo Day, the programme will go into free flow. You are invited to plunge into the various projects and splash around with anyone you like during the Breakouts. These start around 4:40pm and can be joined via Zoom-links that are available on the website.
And of course, most appreciation and respect go to the eight talented student teams, who this edition go by the illustrious names of: Krill + ARMS + D.I.R.T + BikeBotics + Oxillia + BoxBot + Shino + Althea.
Welcome to the future of work!
About the TU Delft Minor Robotics
The Minor Robotics is a 5-month educational program for third year BSc students of Mechanical Engineering, Industrial Design, Computer Science, and Electrical Engineering from Delft University of Technology. A team of students from all above disciplines (to make sure they cover all knowledge needed in robotics) are working on building a robot for a customer.
Students follow multidisciplinary courses, and work in multidisciplinary teams to design, build, and program robots for customers. During the first months of the minor the students will focus on taking courses outside their own discipline (for example, the Industrial Design student will learn about programming and electronics, while a Computer Science student will learn about statics and prototyping). But they will also work on the design of their robot in close collaboration with the customer.
The last months are dedicated full time on building the robot and ends with a demo together with all other teams from the Minor Robotics.
Here’s a video of last year’s TU Delft Minor Robotics event at RoboHouse.