Still early in testing, Nike is blending art and science to reach performance readiness,?working alongside robotics partner Dephy to bring the footwear system to a broad consumer launch in the coming years.
Designing your own PCB isn’t just about cutting costs — it’s about taking full control of your robot’s electronics. A custom board lets you integrate everything you need into one compact, reliable system, eliminating messy wiring and improving performance. While it can make your robot cheaper in the long run and if you mass produced […]
More screen time among children and teens is linked to higher risks of heart and metabolic problems, particularly when combined with insufficient sleep. Danish researchers discovered a measurable rise in cardiometabolic risk scores and a metabolic “fingerprint” in frequent screen users. Experts say better sleep and balanced daily routines can help offset these effects and safeguard lifelong health.
Two machines resembling robotic vacuum cleaners sped around a ring colliding, shooting sparks and catching fire, as Iranian engineering students watched from behind plexiglass.
Claire chatted to Edith-Clare Hall from the Advanced Research and Invention Agency (ARIA) about accelerating scientific and technological breakthroughs.
Edith-Clare Hall is a PhD student at the University of Bristol, Frontier Specialist at ARIA, and leader of Women in Robotics UK. She focuses on the critical interfaces where interconnected systems meet, working to close the gap between academic research and real-world deployment to unlock cyber-physical autonomy. At ARIA, she works as a technical generalist, accelerating breakthroughs across emerging and future programmes. Her PhD research focussed on creating bespoke robotic systems that deliver support for people with progressive conditions such as motor neurone disease (MND).
he milestone marks a significant step for OTTO by Rockwell Automation, part of the company’s 2023 acquisition of Clearpath Robotics, and reinforces Rockwell’s commitment to advancing smart manufacturing through automation.
One year after the international Cybathlon 2024 competition, an Italian team has published a focus article in Science Robotics on the Omnia bionic leg, which took first place in the leg prosthesis race.
Don't be fooled by the fog machine, spooky lights and fake bats: the robotics lab at Worcester Polytechnic Institute lab isn't hosting a Halloween party.
Pop culture has often depicted robots as cold, metallic, and menacing, built for domination, not compassion. But at Georgia Tech, the future of robotics is softer, smarter, and designed to help.
Whether OxDrive’s next application is in agritech, construction, forestry, warehouse logistics or any other untapped use, chances are good that it will need a reliable actuator. And when it does, Horton will likely continue specifying Thomson linear motion solutions.
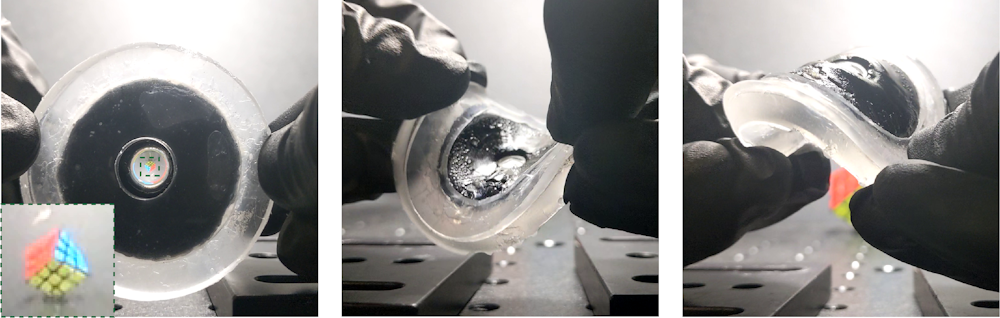
Inspired by the human eye, our biomedical engineering lab at Georgia Tech has designed an adaptive lens made of soft, light-responsive, tissuelike materials.
Adjustable camera systems usually require a set of bulky, moving, solid lenses and a pupil in front of a camera chip to adjust focus and intensity. In contrast, human eyes perform these same functions using soft, flexible tissues in a highly compact form.
Our lens, called the photo-responsive hydrogel soft lens, or PHySL, replaces rigid components with soft polymers acting as artificial muscles. The polymers are composed of a hydrogel − a water-based polymer material. This hydrogel muscle changes the shape of a soft lens to alter the lens’s focal length, a mechanism analogous to the ciliary muscles in the human eye.
The hydrogel material contracts in response to light, allowing us to control the lens without touching it by projecting light onto its surface. This property also allows us to finely control the shape of the lens by selectively illuminating different parts of the hydrogel. By eliminating rigid optics and structures, our system is flexible and compliant, making it more durable and safer in contact with the body.
Why it matters
Artificial vision using cameras is commonplace in a variety of technological systems, including robots and medical tools. The optics needed to form a visual system are still typically restricted to rigid materials using electric power. This limitation presents a challenge for emerging fields, including soft robotics and biomedical tools that integrate soft materials into flexible, low-power and autonomous systems. Our soft lens is particularly suitable for this task.
Soft robots are machines made with compliant materials and structures, taking inspiration from animals. This additional flexibility makes them more durable and adaptive. Researchers are using the technology to develop surgical endoscopes, grippers for handling delicate objects and robots for navigating environments that are difficult for rigid robots.
The same principles apply to biomedical tools. Tissuelike materials can soften the interface between body and machine, making biomedical tools safer by making them move with the body. These include skinlike wearable sensors and hydrogel-coated implants.
This variable-focus soft lens, shown viewing a Rubik’s Cube, can flex and twist without being damaged. Image credit: Corey Zheng/Georgia Institute of Technology.
What other research is being done in this field
This work merges concepts from tunable optics and soft “smart” materials. While these materials are often used to create soft actuators – parts of machines that move – such as grippers or propulsors, their application in optical systems has faced challenges.
Many existing soft lens designs depend on liquid-filled pouches or actuators requiring electronics. These factors can increase complexity or limit their use in delicate or untethered systems. Our light-activated design offers a simpler, electronics-free alternative.
What’s next
We aim to improve the performance of the system using advances in hydrogel materials. New research has yielded several types of stimuli-responsive hydrogels with faster and more powerful contraction abilities. We aim to incorporate the latest material developments to improve the physical capabilities of the photo-responsive hydrogel soft lens.
We also aim to show its practical use in new types of camera systems. In our current work, we developed a proof-of-concept, electronics-free camera using our soft lens and a custom light-activated, microfluidic chip. We plan to incorporate this system into a soft robot to give it electronics-free vision. This system would be a significant demonstration for the potential of our design to enable new types of soft visual sensing.
The Research Brief is a short take on interesting academic work.
Researchers at ETH Zurich have developed artificial muscles that contain microbubbles and can be controlled with ultrasound. In the future, these muscles could be deployed in technical and medical settings as gripper arms, tissue patches, targeted drug delivery, or robots.
Scientists at TU Delft, the Netherlands, have developed a new algorithm that allows multiple autonomous drones to work together to control and transport heavy payloads, even in windy conditions. Drones are ideal for reaching and maintaining hard-to-reach infrastructure, like offshore wind turbines. With often harsh weather, limited payload capacity and unpredictable contact with the environment, it is difficult for current drones to operate safely and effectively.

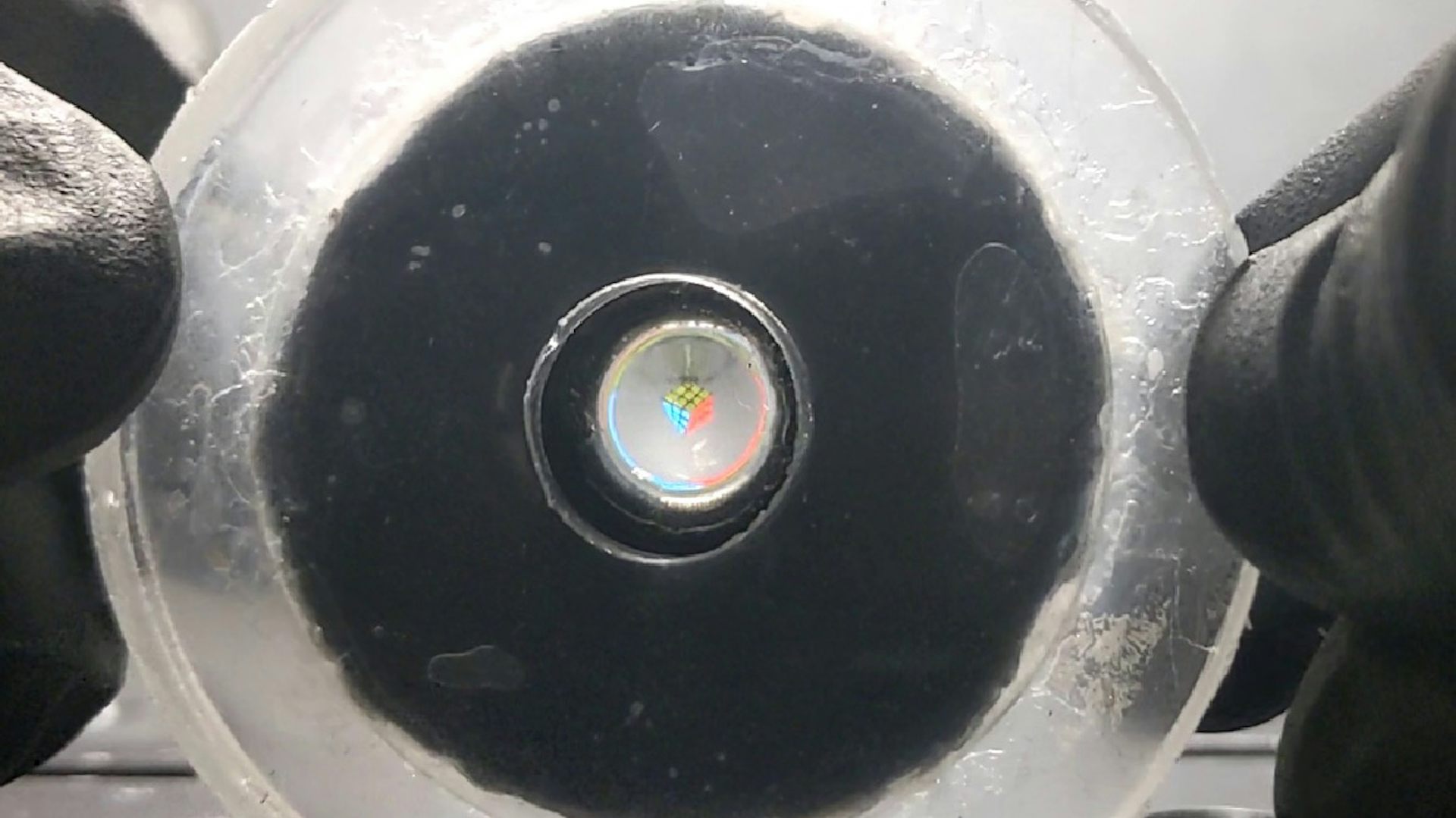 This rubbery disc is an artificial eye that could give soft robots vision. Image credit: Corey Zheng/Georgia Institute of Technology.
This rubbery disc is an artificial eye that could give soft robots vision. Image credit: Corey Zheng/Georgia Institute of Technology.