
Robotics and AI can help build healthier bee colonies, benefitting biodiversity and food supply. © 0 Lorenzo Bernini 0, Shutterstock.com
The robotic bee replicants home in on the unsuspecting queen of a hive. But unlike the rebellious replicants in the 1982 sci-fi thriller Blade Runner, these ones are here to work.
Combining miniature robotics, artificial intelligence (AI) and machine learning, the plan is for the robotic bees to stimulate egg laying in the queen by, for example, feeding her the right foods at the right time.
Survive and thrive
‘We plan to affect a whole ecosystem by interacting with only one single animal, the queen,’ said Dr Farshad Arvin, a roboticist and computer scientist at the University of Durham in the UK. ‘If we can keep activities like egg laying happening at the right time, we are expecting to have healthier broods and more active and healthy colonies. This will then improve pollination.’
While that goes on above the surface, shape-morphing robot roots that can adapt and interact with real plants and fungi are hard at work underground. There, plants and their fungal partners form vast networks.
These robotic bees and roots are being developed by two EU-funded projects. Both initiatives are looking into how artificial versions of living things central to maintaining ecosystems can help real-life organisms and their environment survive and thrive – while ensuring food for people remains plentiful.
“If we can keep activities like egg laying happening at the right time, we are expecting to have healthier broods.”
– Dr Farshad Arvin, RoboRoyale
That could be crucial to the planet’s long-term future, particularly with many species currently facing steep population declines as a result of threats that include habitat loss, pollution and climate change.
One of those at risk is the honeybee, a keystone species in the insect pollination required for 75% of crops grown for human food globally.
Fit for a queen
The RoboRoyale project that Arvin leads combines microrobotic, biological and machine-learning technologies to nurture the queen honeybee’s well-being. The project is funded by the European Innovation Council’s Pathfinder programme.
A unique aspect of RoboRoyale is its sole focus on the queen rather than the entire colony, according to Arvin. He said the idea is to demonstrate how supporting a single key organism can stimulate production in the whole environment, potentially affecting hundreds of millions of organisms.
The multi-robot system, which the team hopes to start testing in the coming months, will learn over time how to groom the queen to optimise her egg laying and production of pheromones – chemical scents that influence the behaviour of the hive.
The system is being deployed in artificial glass observation hives in Austria and Turkey, with the bee replicants designed to replace the so-called court bees that normally interact with the queen.
Foods for broods
One aim is that the robot bees can potentially stimulate egg laying by providing the queen with specific protein-rich foods at just the right time to boost this activity. In turn, an expected benefit is that a resulting increase in bees and foraging flights would mean stronger pollination of the surrounding ecosystem to support plant growth and animals.
The system enables six to eight robotic court bees, some equipped with microcameras, to be steered inside an observation hive by a controller attached to them from outside. The end goal is to make the robot bees fully autonomous.
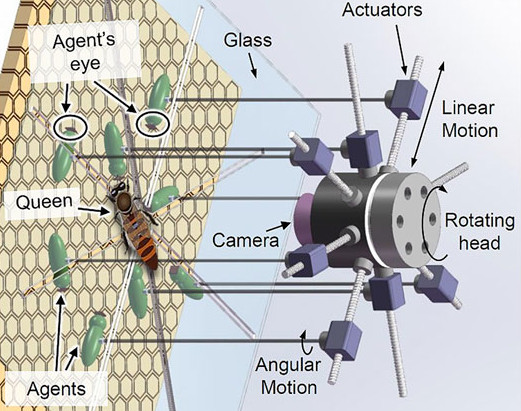
The concept design of RoboRoyale robotic controller. © Farshad Arvin, 2023
Prior to this, the RoboRoyale team observed queen bees in several hives using high-resolution cameras and image-analysis software to get more insight into their behaviour.
The team captured more than 150 million samples of the queens’ trajectories inside the hive and detailed footage of their social interactions with other bees. It is now analysing the data.
Once the full robotic system is sufficiently tested, the RoboRoyale researchers hope it will foster understanding of the potential for bio-hybrid technology not only in bees but also in other organisms.
‘It might lead to a novel type of sustainable technology that positively impacts surrounding ecosystems,’ said Arvin.
Wood Wide Web
The other project, I-Wood, is exploring a very different type of social network – one that’s underground.
Scientists at the Italian Institute of Technology (IIT) in Genoa are studying what they call the Wood Wide Web. It consists of plant roots connected to each other through a symbiotic network of fungi that provide them with nutrients and help them to share resources and communicate.
“Biomimicry in robotics and technology will have a fundamental role in saving our planet.”
– Dr Barbara Mazzolai, I-Wood
To understand these networks better and find ways to stimulate their growth, I-Wood is developing soft, shape-changing robotic roots that can adapt and interact with real plants and fungi. The idea is for a robotic plant root to use a miniaturised 3D printer in its tip to enable it to grow and branch out, layer by layer, in response to environmental factors such as temperature, humidity and available nutrients.
‘These technologies will help to increase knowledge about the relationship between symbionts and hosts,’ said Dr Barbara Mazzolai, an IIT roboticist who leads the project.
Mazzolai’s team has a greenhouse where it grows rice plants inoculated with fungi. So far, the researchers have separately examined the growth of roots and fungi.
Soon, they plan to merge their findings to see how, when and where the interaction between the two occurs and what molecules it involves.
The findings can later be used by I-Wood’s robots to help the natural symbiosis between fungi and roots work as effectively as possible. The team hopes to start experimenting with robots in the greenhouse by the end of this year.
The robotic roots can be programmed to move autonomously, helped by sensors in their tips, according to Mazzolai. Like the way real roots or earthworms move underground, they will also seek passages that are easier to move through due to softer or less compact soil.
Tweaks of the trade
But there are challenges in combining robotics with nature.
For example, bees are sensitive to alien objects in their hive and may remove them or coat them in wax. This makes it tricky to use items like tracking tags.
The bees have, however, become more accepting after the team tweaked elements of the tags such as their coating, materials and smell, according to Arvin of RoboRoyale.
Despite these challenges, Arvin and Mazzolai believe robotics and artificial intelligence could play a key part in sustaining ecosystems and the environment in the long term. For Mazzolai, the appeal lies in the technologies’ potential to offer deeper analysis of little-understood interactions among plants, animals and the environment.
For instance, with the underground web of plant roots and fungi believed to be crucial to maintaining healthy ecosystems and limiting global warming by locking up carbon, the project’s robotic roots can help shed light on how we can protect and support these natural processes.
‘Biomimicry in robotics and technology will have a fundamental role in saving our planet,’ Mazzolai said.
This article was originally published in Horizon, the EU Research and Innovation magazine.

 Claire chatted to Alessandra Rossi from the University of Naples all about social robotics, theory of mind, and robots playing football.
Claire chatted to Alessandra Rossi from the University of Naples all about social robotics, theory of mind, and robots playing football.