With the Robot Launch 2018 competition in full swing – deadline May 15 for entries wanting to compete on stage in Brisbane at ICRA 2018 – we thought it was time to look at last years’ Robot Launch finalists. And a very successful bunch they are too!
Tennibot won the CES 2018 Innovation Award, was covered in media like Times, Discovery Channel and LA Times. Tennibot also won $40,000 from the Alabama Launchpad competition and are launching a crowdfunding campaign today!
Tennibot uses computer vision and artificial intelligence to locate/pick up tennis balls and navigate on the court. Tennibot is the world’s first autonomous tennis ball collector. The Tennibot team has already won the Tennis Industry Innovation Challenge. So, if you think that Tennis + Robots = Your kind of sport – then head over to Tennibot.com to learn more and purchase your Tennibot before it’s too late!
Other 2017 finalists include
- Semio, from California have a software platform for developing and deploying social robot skills.
- Apellix from Florida who provide software controlled aerial robotic systems that utilize tethered and untethered drones to move workers from harm’s way.
- Mothership Aeronautics from Silicon Valley have a solar powered drone capable of ‘infinity cruise’ where more power is generated than consumed.
- Kinema Systems, impressive approach to logistical challenges from the original Silicon Valley team that developed ROS.
- BotsandUs, highly awarded UK startup with a beautifully designed social robot for retail.
- Fotokite, smart team from ETHZurich with a unique approach to using drones in large scale venues.
- C2RO, from Canada are creating an expansive cloud based AI platform for service robots.
- krtkl, from Silicon Valley are high end embedded board designed for both prototyping and deployment.
Apellix were also winners of Automate 2017 startup competition. Mothership have raised a $1.25 million seed round from the likes of Draper Ventures. Kinema Systems has just won the NVIDIA Inception Challenge out of more than 200 entrants and splits $1 million prize money with two other AI startups. BotsAndUs have trialled Bo in more than 11,000 customer service interactions. Krtkl is focused on revenue not fundraising, C2RO is building partnerships with companies like Qihan. And Fotokite just won the $1 million Genius NY competition.

Fotokite CEO Christopher McCall holds a ceremonial $1 million check after the company received the top prize in the Genius NY business competition at the Marriott Syracuse Downtown on Monday. (Rick Moriarty | rmoriarty@syracuse.com) via Syracuse.com

NVIDIA CEO and founder Jensen Huang, Kinema Systems CEO and founder Sachin Chitta, NVIDIA founder Chris Malachowsky, NVIDIA VP of healthcare and AI business development Kimberly Powell. via NVIDIA blog
You can watch the pitch presentation here: https://youtu.be/BzcrREvD8k0
You’ll also see some other familiar names from the shortlist for 2017, not to mention lots of success for our 2016 top startups. We can’t wait to see who will be finalists in 2018!
The Robot Launch startup competition has been running since 2014 and has helped robotics startups reach investors, build a reputation and grow their markets. We’ve had entries from all over the world and one of the significant trends has been how rapidly the stage of startup entrants has advanced. We now judge startups in several divisions: Preseed, Seed and PostSeed (or Pre Series A)
Do you have a startup idea, a prototype or a seed stage startup in robotics, sensors or AI?
Submit your entries by May 15 2018, if you want to be selected to pitch on the main stage of ICRA 2018 on May 22 in Brisbane Australia for a chance to win $3000 AUD prize from QUT bluebox!
The top 10 startups will pitch live on stage to a panel of investors and mentors including:
- Martin Duursma, Main Sequence Ventures
- Chris Moehle, The Robotics Hub Fund
- Yotam Rosenbaum, QUT bluebox
- Roland Siegwart, ETH Zurich
Entries are also in the running for a place in the QUT bluebox accelerator*, the Silicon Valley Robotics Accelerator*, mentorship from all the VC judges and potential investment of up to $250,000 from The Robotics Hub Fund*. (*conditions apply – details on application)
CONDITIONS:
Pre Seed category consists of an idea and proof of concept or prototype – customer validation is also desirable.
Seed category consists of a startup younger than 24 months, with less than $250k previous investment.
Post Seed category consists of a startup younger than 36 months, with less than $2.5m previous investment.
CAN’T MAKE IT TO AUSTRALIA?
No problems, mate! We’ll be continuing the Robot Launch competition with additional rounds in the US and in Europe through out the summer. Go ahead and enter now anyway!
Enter the Robot Launch Startup Competition at ICRA 2018 here.
FOR YOUR GUIDE ON GOOD PITCH DOCUMENTS:
A sample Investor One Pager can be seen here. And your pitch should cover the content described in Nathan Gold’s 13 slide format.
 In this episode of
In this episode of 

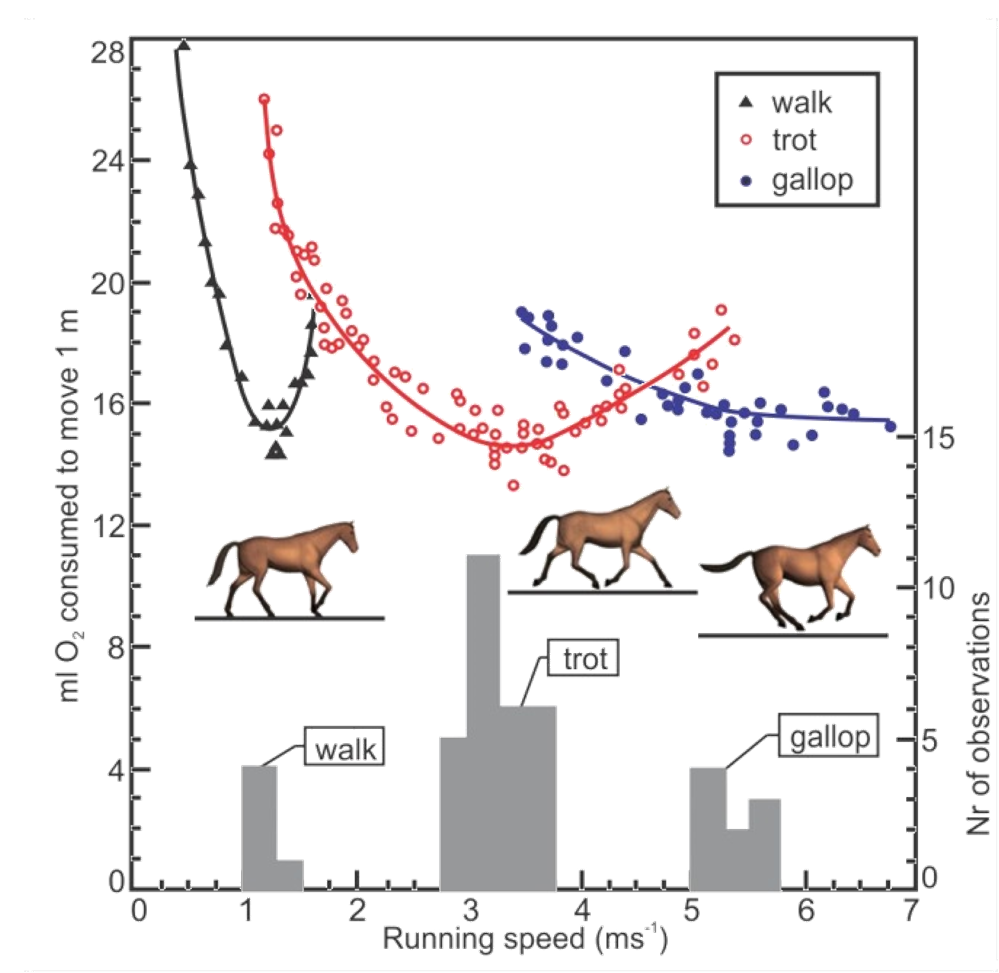
 The choice of gait, that is whether we walk or run, comes to us so naturally that we hardly ever think about it. We walk at slow speeds and run at high speeds. If we get on a treadmill and slowly crank up the speed, we will start out with walking, but at some point we will switch to running; involuntarily and simply because it feels right. We are so accustomed to this, that we find it rather amusing to see someone walking at high speeds, for example, during the racewalk at the Olympics. This automatic choice of gait happens in almost all animals, though sometimes with different gaits. Horses, for example, tend to walk at slow speeds, trot at intermediate speeds, and gallop at high speeds. What is it that makes walking better suited for low speeds and running better for high speeds? How do we know that we have to switch, and why don’t we skip or gallop like horses? What exactly is it that constitutes walking, running, trotting, galloping, and all the other gaits that can be found in nature?
The choice of gait, that is whether we walk or run, comes to us so naturally that we hardly ever think about it. We walk at slow speeds and run at high speeds. If we get on a treadmill and slowly crank up the speed, we will start out with walking, but at some point we will switch to running; involuntarily and simply because it feels right. We are so accustomed to this, that we find it rather amusing to see someone walking at high speeds, for example, during the racewalk at the Olympics. This automatic choice of gait happens in almost all animals, though sometimes with different gaits. Horses, for example, tend to walk at slow speeds, trot at intermediate speeds, and gallop at high speeds. What is it that makes walking better suited for low speeds and running better for high speeds? How do we know that we have to switch, and why don’t we skip or gallop like horses? What exactly is it that constitutes walking, running, trotting, galloping, and all the other gaits that can be found in nature?