Italy’s Pompeii tests new guard dog—a robot named Spot
Under the amused gaze of many tourists, a robot dog wanders the ancient stone alleys of Pompeii's famous archaeological park.

One of the essential factors for widespread robotics adoption, especially in the inspection and maintenance area, is the regulatory landscape. Regulatory and legal issues should be addressed to establish effective robotics deployment legal frameworks. Common goals of boosting the widespread adoption of robotics can only be achieved by creating networks between the robotics community and regulators.
On the 23rd of March, Maarit Sandelin, Peter Voorhans and Dr Carlos Cuevas Garcia were invited by Robotics4EU and RIMA network to discuss how cooperation among regulators and the robotics community can be fostered and what are the most pressing legal challenges for the inspection & maintenance application area of robotics.
Maarit Sandelin and Peter Voorhans from Robotic Innovation Department in SPRINT Robotics have opened the workshop with the question of why robotics are important in inspection and maintenance? Speakers highlighted three main aspects: safety, efficiency and costs. Firstly, robotic solutions allow for reducing the fatalities and risks of accidents in the environments of heights, confined spaces or under-water. Secondly, the preparation work for inspection and maintenance (shutting down the facilities, clearing and cleaning the spaces, air sampling, getting the permits) is not required for inspection and maintenance done by a robot. The bureaucracy – applying and waiting for permits – is reduced as well.
However, the integration of robots faces barriers in two main dimensions: differences in cross-border standards and acceptance of robotics by inspectors. Speaking of regulatory challenges, Peter Voorhans identified the main problems:
To move further with the integration of robots into Inspection and maintenance, the Europe-wide acceptance and legislation of robots are needed. First, the acceptance of robotics (for example, remote visual techniques) by notified bodies would be a big step further. Also, the training of inspectors should involve robotics training, so the inspectors would understand the advantages and consequences of the integration of robotics and could advocate themselves for the uptake of robotics.
Different legislation and regulations across borders mean that in each country, inspection has to be performed by local certified inspectors. For example, a Dutch company is performing an in-service inspection in France. Due to differences in legislation, a certified inspector from the Netherlands is not allowed to perform the remote visual inspection in France. A local notified body needs to be involved.
Leaving aside the national & cross-border legislation issues, Peter Voornhans has drawn attention to the company-level of policies. As an example, the internal policies in DOW, chemical and plastics manufacturer, defined that people will not be allowed in confined spaces starting from 2025. This leadership position gave a strong incentive to introduce robotics and convince inspectors to use them. The internal programme ensured the recognition and celebration of robotic use cases and best practices, ensuring higher levels of robotics acceptance overall.
Dr Carlos Cuevas Garcia, a postdoctoral researcher at the Innovation, Society and Public Policy Research Group at the Munich Center for Technology in Society (MCTS), Technical University Munich, has shared his experience in following the EU-funded projects for uptake of robotics in I&M. Dr Garcia has evaluated the policy goals and results, following the cycle of the projects, as policy instruments.
From the sociology of technology perspective, robotics in I&M plays at the unique intersection of innovation and maintenance. Innovation is done by heroic people, entrepreneurs, it is celebrated, and covered in news. Maintenance is done by invisible people, it is usually overlooked. However, such projects as RIMA, bring the two dimensions together. As innovation aims at improving maintenance, what can innovation learn from maintenance? How can maintenance improve innovation?
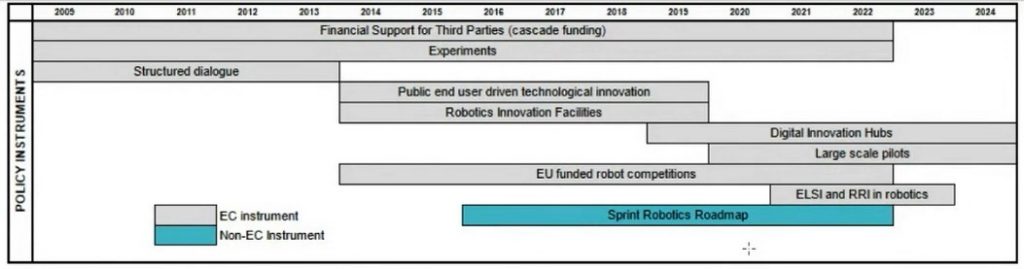
Speaking of the policy role in this intersection, Dr Garcia has presented the innovation policy landscape from the instrument’s perspective.
In order to improve this landscape, he identified two ways forward:
The examination could be implemented considering the vulnerabilities in the policy instruments. Drawing from the experience in observing and analysing the EU-funded projects, as instruments to achieve policy goals, Carlos identified several vulnerabilities:
.
Speaking of ways to improve the policy process, Carlos identified that besides technical progress (for example, going beyond technological readiness level from 2 to 5), instruments should consider other metrics of success, e.g.:
Dr Carlos concluded by suggesting a couple of policy recommendations:
Finally, the session was concluded with a panel discussion thematizing previous presentations, and engaging the audience. As a final conclusion, the experts suggested beginning with industry-led insights to change the paradigm of policy framework on a larger scale.
This article is a cutout of my forthcoming book that you can sign up for here: https://www.danrose.ai/book
When interviewing domain experts for artificial intelligence solutions, it's essential to avoid discussing a specific solution but instead focus on the business outcome and the problem at hand. When you interview experts, they sometimes settle on a particular solution too early, even without knowing it. As the solution architect, you might also do the same and miss out on better alternatives. I often catch myself doing that as finding the perfect solution is the most satisfying part of the discovery phase. To focus on the problem and business outcome, I use the following guide as inspiration for questions.
Question: Tell me about the last time you did X (E.g. forecasted sales or did shift planning at the ice cream store)
The question works better than "How do you do forecasting?". Asking this way will provide you with a polished best-case answer. The subject matter expert will tell you how everything is supposed to be done. We all want to present our best version of ourselves, and we can be a little afraid of admitting that we jump hoops when we are busy or things are a little messy. But we are all busy, and everyday work is messy. Teresa Torres has a great example in her book "Continues Discovery Habits.": When you ask people how they buy jeans, they will tell you that they go by brand and quality. When you ask them how they bought jeans the last time, they will tell you that there was a nice discount.
When building AI, you are looking to identify all the mess and procedure bypassing. That is where you will face challenges, and can you decrease these with AI; you can provide much value.
Question: How will you use the information provided by the AI? (E.g. Information about how many ice creams are sold on a given day)
That question focuses on the business need and outcome and not just the wish for the information or the technical solution. The value in any AI can be found in what action we decide on based on the information provided by the model. Uncovering the intended actions reveals the potential value of the AI solution. It also exposes the reasoning (And sometimes the lack of) behind the need for the AI solution.
Question: How would the solution help your new colleague?
Experienced employees can have a hard time seeing the idea of assistance (from AI or not). They can always find a solution to challenges. They don't need help. But when their inexperienced colleagues become the subject, they have an easier time seeing the value and can explain how a solution will help them.
Question: Why can't you solve this problem in any other way than AI?
That will often result in the subject telling you how they think AI will solve the problem. It uncovers potential misunderstandings about what AI can and cannot do.
It also uncovers how well thought through the idea is. Is AI just solutions chosen due to the hype, or have alternatives seriously been considered? Don't be afraid to challenge the idea of using AI. Any good decision can stand that test and is it not a good decision, you will know at some point no matter what. Better sooner than later.
Question: Why will this solution fail?
Have you ever heard people say: "I knew that would fail"? If that is true, even occasionally, then asking this question can save you trouble. You might also know the feeling that you ignored the signs of challenges when you were too excited about a solution. I certainly do.
When asking this question, I often get the answer: "We will fail because we will try to solve everything and not get it done." That is a usual challenge and making the subjects say this brings some realism to the project.
Question: Show me how you do X?
Make the person show you how they do their work. Observing a subject's actions will uncover intangible knowledge. What has become type 1 and routine for the subject will confuse you, and you can point that out and ask what is going on.
Question: What will be hard about (X, Y, Z)?
I often ask questions such as "What will be hard about getting a high accuracy?" or "What will be hard about onboarding users to the solution?". Questions like that uncovers will uncover data features that might not be as trustworthy as you thought. Answers like "We changed the way we log data for X recently" are typical here.
For tips, sign up for the book here: https://www.danrose.ai/book

Dr. Sihao Sun discusses his award-winning research in the area of controlling the flight of a drone when faced with a sudden rotor failure.
Typical research in this area addressed the case where one of the four rotors in a quadrotor suddenly, spontaneously stops working. This previous research does not take into full account real-life scenarios where rotor failure is common. This includes collisions with other drones, walls, birds, and operating in degraded GPS environments.
Dr. Sihao Sun is a postdoctoral research assistant at the Robotics and Perception Group (RPG) in University of Zurich directed by Prof. Davide Scaramuzza. Currently, he is working on control and perception for aerial robots (drones).
In December 2020, he received his PhD degree in Aerospace Engineering from the Control and Simulation Group of Delft University of Technology. His works on quadrotor fault-tolerant flight control have been featured by reputable media, such as IEEE Spectrum.