As the next edition of the Swiss Robotics Day is in preparation in Lausanne, let’s revisit the November 2021 edition, where the vitality and richness of Switzerland’s robotics scene was on full display at StageOne Event and Convention Hall in Zurich. It was the first edition of NCCR Robotics’s flagship event after the pandemic, and it surpassed the scale of previous editions, drawing in almost 500 people. You can see the photo gallery here.
Welcome notes from ETH President Joël Mesot and NCCR Robotics Director Dario Floreano opened a dense conference programme, chaired by NCCR Robotics co-Director Robert Riener and that included scientific presentations from Marco Hutter (ETH Zurich), Stéphanie Lacour and Herb Shea (both from EPFL), as well as the industry perspective from ABB’s Marina Bill, Simon Johnson from the Drone Industry Association and Hocoma co-founder Gery Colombo. A final roundtable – including Robert Riener, Hocoma’s Serena Maggioni, Liliana Paredes from Rehaklinik and Georg Rauter from the University of Basel – focused on the potential and the challenges of innovation in healthcare robotics.
Over 50 exhibitors – including scientific laboratories as well as start-ups and large companies – filled the 3,300 square-meter venue, demonstrating technologies ranging from mobile robots to wearable exoskeletons, from safe delivery drones to educational robots and much more. Sixteen young companies presented their innovations in a start-up carousel. Dozens of professional meetings took place throughout the day, allowing a diverse audience of entrepreneurs, funders, academics and policy makers to network and explore possible collaborations. A crowd of young researchers participated in a mentoring session where Marina Bill (ABB), Auke Ijspeert (EPFL) and Iselin Frøybu (Emovo Care) provided advice on academic and industrial careers. Sixteen students participated in the Cybathlon @school competition, experimenting with robotic technologies for disability, and in the end officially announcing CYBATHLON 2024.
During the event, the next chapter for Swiss robotics was also announced: the launch of the NTN Innovation Booster on robotics, which will run from 2022 to 2025 and will be led by EPFL’s Aude Billard. Funded by Innosuisse, the NTN will act as a platform for new ideas and partnerships, supporting innovation through “idea generator bubbles” and specific funding calls.
The 2021 Swiss Robotics Day marked the beginning of NCCR Robotics’s final year. The project, launched in 2010, is on track to meet all its scientific goals in the three areas of wearable, rescue and educational robotics, while continuing to focus on supporting spin-offs, advancing robotics education and improving Swiss Robotics Day showcases innovation equality of opportunities for all robotics researchers. The conclusion of NCCR Robotics will be marked by the next edition of the Swiss Robotics Day as larger, two-days public event that will take place in Lausanne on 4 and 5 November 2022.
Wearable robotics
The goal of the NCCR Grand Challenge on Wearable Robotic is to develop a novel generation of wearable robotic systems, which will be more comfortable for patients and more extensively usable in a clinical environment. These new technological solutions will help in the recovery of movement and grasping after cardiovascular accidents and spinal cord lesions. They can be used to enhance physiotherapy by improving training, thus encouraging the brain to repair networks (neurorehabilitation). And they can be used as assistive devices (e.g. prosthetic limbs and exoskeletons) to support paralysed people in daily life situations.
While current wearable robots are making huge advances in the lab, there is some way to go before they become part of everyday life for people with disabilities. In order to be functional, robots must work with the user and not cause damage or irritation (in the case of externally worn devices) or be rejected by the host (in the case of implants), they must have their own energy source that does not need to be constantly plugged in or re-charged, and they need to be affordable.
Rescue robotics
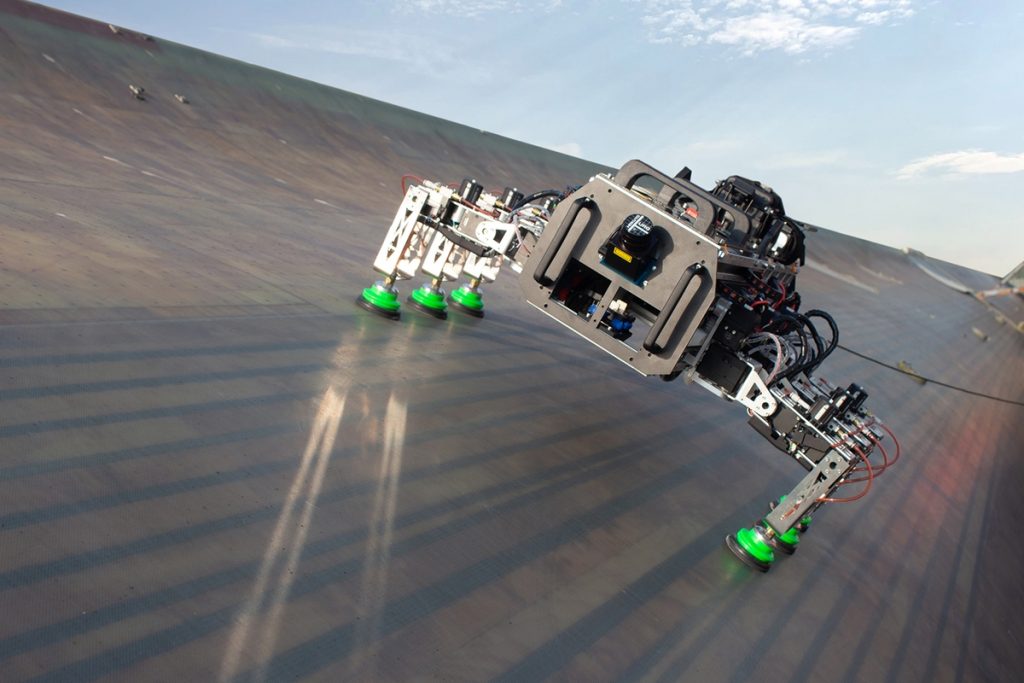
After a natural disaster such as an earthquake or flood, it is often very dangerous for teams of rescue workers to go into affected areas to look for victims and survivors.
The idea behind robots for rescue activities is to create robust robots that can travel into areas too dangerous for humans and rescue dogs. Robots can be used to assess the situation and to locate people who may be trapped and to relay the location back to the rescue teams, so that all efforts can be concentrated on areas where victims are known to be. Robots are also being developed to carry medical supplies and food, thereby focusing resources where they are most needed.
The main research issues within the field of mobile robotics for search and rescue mission are durability and usability of robots – how to design robots that are easily transported, can function efficiently in all weather conditions and that have long lasting power, and robots that can navigate themselves and have effective enough sensors to pick out victims.
Educational robotics
In the 1970’s and 1980’s, robots were typically introduced in schools as a tool for teaching robotics or other Science, Technology, Engineering and Mathematics (STEM) subjects. However, this specificity held back their adoption for wider educational purposes. This early failure of adoption of robots in classrooms happened because they were unreliable, expensive and with limited applications.
Nowadays, with robots being cheaper and more easily deployable, applications in education have become easier. In the past fifteen years, there have been an increasing number of extracurricular robotics activities showing the popularity of robotics in an informal educational context. However, robots are still underused in schools for formal education. Although there is no agreement over the exact reasons for this situation, it seems clear, from different studies, that teachers play a key role in the introduction of technology in schools.
During the first two phases of NCCR Robotics two products were developed: the Thymio robot— a mobile robot increasingly used to teach robotics and programming, and Cellulo — a small, inexpensive and robust robot that kids can move with their hands and use in groups.
Current research focuses on two aspects. The first one is inventing new forms of interactions between learners and tangible swarms based on the Cellulo robot, and studying the learning outcomes enabled by these interactions.
The second aspect is investigating teacher adoption of robotics from two points of view: platform usability and teacher training. Research will show how to train teachers and exploit Thymio and Cellulo in their daily activities and how to minimize their orchestration load. Activities relating to computational thinking skills are the main target, with school topics outside the STEM domains also included.