Spoken dialogue is the most natural way for people to interact with complex autonomous agents such as robots. Future Army operational environments will require technology that allows artificial intelligent agents to understand and carry out commands and interact with them as teammates.
From lizards to kangaroos, many animals with tails possess an agility that allows them to turn or self-right after a foot slip. Cheetahs demonstrate tremendous precision and maneuverability at high speeds due, in part, to their tails. Translating this performance to robots would allow them to move more easily through natural terrain. However, adding a tail to a robot carries disadvantages like increased mass, high inertia, and a higher energy cost.
In this technical talk, Amanda Prorok, Assistant Professor in the Department of Computer Science and Technology at Cambridge University, and a Fellow of Pembroke College, discusses her team’s latest research on what, how and when information needs to be shared among agents that aim to solve cooperative tasks.
Abstract
Effective communication is key to successful multi-agent coordination. Yet it is far from obvious what, how and when information needs to be shared among agents that aim to solve cooperative tasks. In this talk, I discuss our recent work on using Graph Neural Networks (GNNs) to solve multi-agent coordination problems. In my first case-study, I show how we use GNNs to find a decentralized solution to the multi-agent path finding problem, which is known to be NP-hard. I demonstrate how our policy is able to achieve near-optimal performance, at a fraction of the real-time computational cost. Secondly, I show how GNN-based reinforcement learning can be leveraged to learn inter-agent communication policies. In this case-study, I demonstrate how non-shared optimization objectives can lead to adversarial communication strategies. Finally, I address the challenge of learning robust communication policies, enabling a multi-agent system to maintain high performance in the presence of anonymous non-cooperative agents that communicate faulty, misleading or manipulative information.
Biography
Amanda Prorok is an Assistant Professor in the Department of Computer Science and Technology, at Cambridge University, UK, and a Fellow of Pembroke College. Her mission is to find new ways of coordinating artificially intelligent agents (e.g., robots, vehicles, machines) to achieve common goals in shared physical and virtual spaces. Amanda Prorok has been honored by an ERC Starting Grant, an Amazon Research Award, an EPSRC New Investigator Award, an Isaac Newton Trust Early Career Award, and the Asea Brown Boveri (ABB) Award for the best thesis at EPFL in Computer Science. Further awards include Best Paper at DARS 2018, Finalist for Best Multi-Robot Systems Paper at ICRA 2017, Best Paper at BICT 2015, and MIT Rising Stars 2015. She serves as Associate Editor for IEEE Robotics and Automation Letters (R-AL), and Associate Editor for Autonomous Robots (AURO). Prior to joining Cambridge, Amanda Prorok was a postdoctoral researcher at the General Robotics, Automation, Sensing and Perception (GRASP) Laboratory at the University of Pennsylvania, USA. She completed her PhD at EPFL, Switzerland.
The next technical talk will be delivered by Koushil Sreenath from UC Berkeley, and it will take place on April 23 at 3pm EDT. Keep up to date on this website.
Our recent discussions with key players in the field confirm that MRO’s operations will increase significantly in late 2021 or 2022. How will maintenance centres efficiently restart their operations? What impact can technology have in this recovery?
Despite artificial intelligence and robotics adapting to many other areas of life and the work force, construction has long remained dominated by humans in neon caps and vests. Now, the robotics company Baubot has developed a Printstones robot, which they hope to supplement human construction workers onsite.
Following Grabit’s inception in 2013, Nike Inc. made an investment in the company and later became one of the first customers to buy its materials handling robot system, Stackit. Using Stackit, Nike can manufacture 600 pairs of shoes in just one eight-hour shift.
Since 2007, two professors at the TU Delft have been researching ways to harvest energy from the wind using a kite. The robotic kite looks set to make its debut in the energy sector, but often inventions are used in unexpected ways. In this series of articles, we take robot innovations from their test-lab and bring them to a randomly selected workplace in the outside world. From kindergarten teacher Fransien, we learn that big kites could also be child’s play, quite literally.
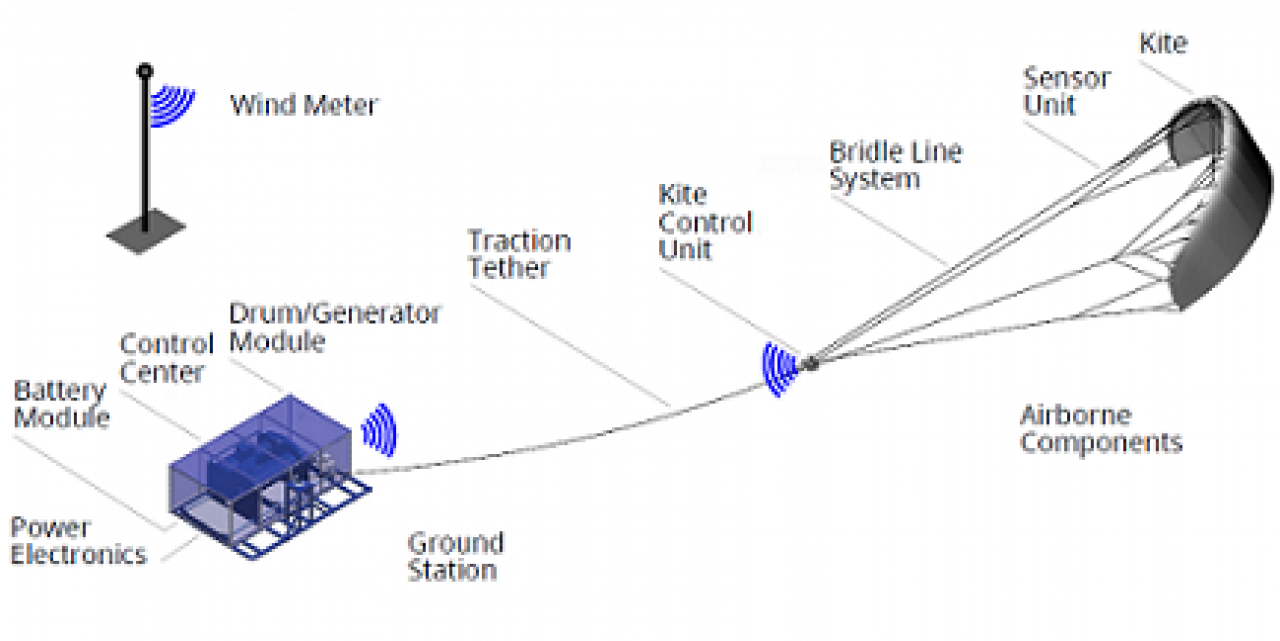
A robot wheels in the kite and then slowly releases it, painting 8-shaped loops on the sky. As this happens, the motion of the unwinding rope generates electricity. This innovative solution harmonises power generation with the flows of the atmosphere. Kitepower uses wind to provide us with energy, but rather than simply sticking a big fan in the air and waiting for air flows to come and go, it latches on to the wind and stays with it.
Professor Schmehl explains his research: “We explored the idea of wind energy through the use of robotically engineered kites”. The result is a big sail floating high up in the air with a small unit that automatically steers, controls the pulling force and connects to the ground station. This ground station senses when to reel in the kite to convert a maximum of motion – or kinetic energy – into electricity. Using only the vital parts of a wind-turbine, KitePower is cheaper to make, less noisy and more durable than traditional windmills.
KitePower is the company founded to bring this product to market. In England, the idea is to build kite stations in the sea, but in the Netherlands, KitePower is looking to launch them on solid land. The technical challenge now is to get fly the kite above a certain altitude and make its flight autonomous so the system can work without human interaction. While this technology is being optimised, we were wondering: could there be a different, totally unexpected way of using this technology?
To explore this, we took Kitepower to Fransien Godeke, a kindergarten teacher in the Bilt. She has been educating four to six year-old children for 36 years. Her understanding of how kids grow and learn is incredible, and we were curious how Fransien would use this robot innovation in the context of her work.
Copied by a six-year old
“We once tried to build our own mini-parachutes in class, maybe we could make this as well?”, is her first thought. Fransien tells me that children learn most through playing and making things themselves. A re-engineering process would allow them to experience what is needed to keep a kite like this floating in the wind, without any help. She says: “We could use straws to make the shape, pull through little cords and find very thin paper to lift the entire toy in the air.”
Make a big dragon
Children also love pretending to be something they’re not. “Kitepower looks like it has a futuristic dragon skin”, Fransien fantasises. With a kite this large, the kids could transform into a ten meter long dragon. They could jump and run around and show of to other kids. Or build a big hut to shelter in and maybe also become a train. In short, she imagines that kids would make anything they want with this versatile piece of kite fabric created by Professor Schmehl and his colleagues.
Physics of flight
If the class would get access to a real Kitepower kite, we could try to get it up in the air together says Fransien: “Children somehow have the impulse to start running when they want to get something airborne. Perhaps this robot could show them how speed translates to lift and power”.
A theatrical flying dragon show for entertaining people in nature that also generates green dragon energy. How cool is that as a spectacle?
Finally, we come to the question whether childer would be clever enough to understand the concept of Kitepower. Fransien says: “If you show them the physics, they will understand it”. To illustrate how fast Fransien’s kids learn, she tells me her toddlers already code their own programs: “They get a little matrix, I tell them where the little robot – called Bbot – should go and they program it within minutes”.
KitePower is being developed to solve the world’s energy crisis, but in the kindergarten it becomes a wonderful tool for irreverent experimentation by the world’s youngest engineers. Just imagining what children would do with Kitepower, already opens up exciting new avenues that we didn’t see before. A theatrical flying dragon show for entertaining people in nature that also generates green dragon energy: how cool is that as a spectacle?
The challenge for many companies is how to consistently maintain a safe workplace without creating barriers to productivity or innovation. Enter autonomous mobile robots (AMRs).
Carnegie Mellon University's acclaimed snake-like robot can now slither its way underwater, allowing the modular robotics platform to inspect ships, submarines and infrastructure for damage.
A team of researchers at the University of California, Berkeley, has built a two-legged robot with t he ability to teach itself to walk using reinforcement learning. The team has written a paper describing their work and has uploaded it to the arXiv preprint server.
In this webinar we will look at how integrating robotics into the working world means that both cobots and autonomous systems will be important differentiators for production, processes, and innovation.
Waypoint Robotics/Productive Robotics omnidirectional 7 DoF mobile manipulator combines the easiest to use, most capable omnidirectional autonomous mobile robot with the simplest and most flexible 7 axis collaborative robot arm. The Vector AMR’s omnidirectional mobility enables fast, precise docking in any direction or orientation so the OB7 can perform accurate and precise grasping or picking tasks, taking full advantage of the cobots’ 7 degrees of freedom (7 DoF) and superior dexterity. It can be powered using Waypoint’s EnZone wireless charger that provides on-demand energy and opportunity charging for longer run times. Workers can use this mobile platform to perform repetitive tasks such as machine tending, quality assurance sampling, material replenishment, packaging, and many others, so they can focus on the high skilled jobs for which they are uniquely qualified. It has never been easier or more cost effective to deploy a mobile manipulator for manufacturing and logistics applications.
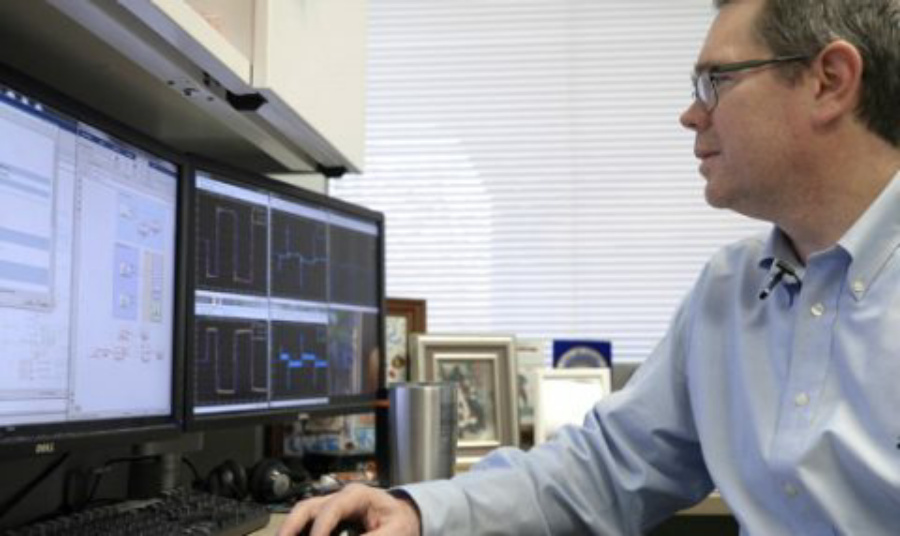
Physician driving CorPath GRX from the interventional cockpit. Image Credit: Corindus
In 2018, five patients at the Apex Heart Institute in Ahmedabad, India, received treatment for coronary artery disease (CAD) the same way 3 million others do each year: a small balloon was inserted into an artery in the heart and inflated, making way for the placement of a stent to keep the vital pathway open.
The procedure, known as percutaneous coronary intervention (PCI), is the standard treatment for atherosclerosis, a common CAD marked by the buildup of plaque inside the arteries and a subsequent restriction of blood flow. Like many patients before them, their operation was assisted by a robot—the CorPath GRX robotic platform from Corindus, A Siemens Healthineers Company.
Yet unlike anyone else before them, these five patients were part of an amazing first: their principal physician was not in the room with them during the procedure. In fact, he was 20 miles away, guiding the robot—performing the operation to perfection—from a remote workstation.
Welcome to the new frontier of telemedicine.
Robotic Surgery Tackles Leading Cause of Death
According to the World Health Organization (WHO), cardiovascular disease (CVD) is the number one cause of death globally, claiming 17.9 million lives per year. The impact is greatest in locations lacking ready access to critical care, such as developing countries and rural areas.
The WHO notes that over three-quarters of deaths from CVD occur in low- and middle-income countries. In developed countries, the issue arises in rural communities where smaller hospitals often do not have specialists, such as interventional cardiologists, on staff. It is in these areas where remote solutions like the one Corindus has pioneered offer hope and tantalizing possibilities.
Dr. Tejas Patel performed these remote interventions and wrote about them with his colleagues Sanjay Shah and Samir Pancholy in EClinicalMedicine. According to the article, “The vast majority of patients with CAD or acute coronary syndrome in developing countries have little or no access to immediate interventional therapy. Current robotic technology combined with improvements in network connectivity and operator expertise in R-PCI [robot-assisted PCI] procedures can be employed as a front-line service in regions where such expertise is not available.” The article also noted that the system could be used as a supplemental service to provide expertise to a larger number of patients.
“Go Remote or Go Home”
Reaching patients around the world wherever and whenever they need treatment has been on the mind of the Corindus team since the introduction of their CorPath robotic platform. So has physician safety.
While CorPath’s robotic advances have provided physicians with exceptional precision and control during PCI procedures, the system still needed to do more to safeguard physician health—exposure to radiation from imaging techniques used in the procedures was common, as were orthopedic injuries stemming from the necessary heavy protective equipment doctors were forced to wear.
“Sensing an opportunity to increase the safety of surgeons while at the same time addressing the growing global need for innovative telemedicine solutions, Corindus CEO Mark Toland famously told our team that it was time for us to ‘go remote or go home,’” recalls Nicholas Kottenstette, Ph.D., R&D Fellow at Corindus. “This battle cry resonated across the company, forcing us to push the envelope, further evolve the capabilities and possibilities of our CorPath system, and achieve another industry milestone: enabling the first remote robotic-assisted PCI.”
Technology for Aircraft Control Leads to Robotic Surgery
Kottenstette has worked on the robot product line since joining Corindus. But he started his career in a different field. He received his Ph.D. in electrical engineering at Notre Dame, where he designed a framework to control systems over networks, ensuring stability while accounting for time delay and data loss. He then began his career at Vanderbilt University, developing robotic control systems for aircraft using Model-Based Design. It was this work that led to a different type of control system that operated over the network: the surgical robot.
All of that work, which involved Model-Based Design using MATLAB and Simulink, has proven integral to meeting the challenges of developing our precision robotic systems.
Nicholas Kottenstette, Ph.D., R&D Fellow at Corindus
To understand the complex workings of the robotic system, it helps to take a basic inventory of its key components. The system comprises two main stations: a bedside unit, the part of the system which allows for device manipulation within the patient, and an interventional cockpit, from which the physician guides the devices during an intervention.
The bedside unit has an extended reach arm and bedside touch screen. This is operated by the scrub staff. Image Credit: CorindusThe interventional cockpit comprises a radiation shield, monitor, and control console that enable the interventional cardiologist to work from a seated position without wearing lead. Image Credit: Corindus
The bedside unit consists of the extended reach arm, the robotic drive, and the single-use sterile cassette. The arm positions the robotic drive and cassette. The robotic drive, which receives inputs from the control console in the cockpit, guides the cassette, which in turn manipulates the guidewire, balloon/stent catheter, and guide catheter in the patient’s body.
The interventional cardiologist works from the interventional cockpit, which contains both the robot control subsystem and a telepresence communication system, and links the physician to the robot in the bedside unit.
“The robot control substation contains a control computing system, monitors, networking equipment (i.e., connectivity) and a robotic console with three joysticks,” says Dr. Patel. “The monitors display real-time hemodynamic variables and fluoroscopic video, providing the operator enhanced visualization of the PCI procedure. One joystick is for balloon/stent manipulation, one for guidewire manipulation, and the third for guide catheter manipulation.”
A closer look at these two main systems—the bedside unit and interventional cockpit—reveals a collaboration and interdependence essential to the successful performance of the robotic system. Combined, these systems have delivered quantifiable benefits, including increased accuracy in measuring anatomy to determine lesion size and stent length, and increased precision in stent positioning.
Long-Distance Surgery
Performing an intricate procedure remotely posed significant design challenges, chief among them real-time, end-to-end video capture and processing: physicians may operate less effectively when there is significant lag or latency in the images they see and commands they send over a network. In addition, it is important that the physician is aware of the quality of the network connection, which includes network latencies and received frames of images per second (throughput). The system should limit the physician from operating under poor networking conditions in order to limit risks of patient harm.
To overcome the challenges of real-time systems operations, Kottenstette drew on his track record of innovation using Model-Based Design.
MATLAB, Simulink, and Simulink Real-Time have long been staples of my application-development work on the CorPath system, from embedded motor controls for guiding the robotic arm’s motions, to the way the fluoroscopic images are communicated with the workstations. My team modeled the remote system using Model-Based Design.
Nicholas Kottenstette, Ph.D., R&D Fellow at Corindus.
That approach has paid dividends. For example, as Corindus began to develop its next generation platform, CorPath GRX, it used universal cameras well before there was real-time support for USB 3.0 devices.
“As we pushed to develop an advanced real-time video capability that didn’t interrupt the physicians’ normal workflow, MathWorks worked hand in hand with us to develop the needed support,” says Kottenstette. “Once we had that, we could compress and decompress images as needed to facilitate their real-time transmission and consumption by the remote operator.”
As for ensuring a dedicated real-time network capability, Corindus used the Speedgoat family of target machines—high-performance computers optimized for specific applications—to execute his system’s mission-critical applications. With a Speedgoat target at the operating site and one at the remote location, where it supported the interventional cockpit, CorPath GRX performed admirably.
Dr. Patel notes in his report, “The remote R-PCI procedure was successful in all aspects. The remote interventionalist operator rated the functionality of the robotic platform and the network connection system as equivalent to an in-lab manual PCI procedure with no significant procedural delays or technical difficulties. This was corroborated by the 53 millisecond mean delay recorded by the network, which is most likely imperceptible to the operator.”
Kottenstette designed Simulink Real-Time models that control the bedside unit.
Encouraged by its breakthrough success with remote R-PCI procedures, Corindus is continuing to think big—big enough to lead a telemedicine revolution in brain treatment as well.
“Every second matters for stroke victims, just as it does for those who suffer heart attacks,” says Kottenstette. “Our ability to treat patients wherever they are with our remote robotic protocol is the wave of the future and is driving our next set of CorPath innovations as we take on strokes, which is the number one cause of disability and fifth leading cause of death in the U.S.”
Watch this video (3:11) to see how Corindus runs real-time applications on Speedgoat targets, using Precision Time Protocol to synchronize the local and remote site clocks.