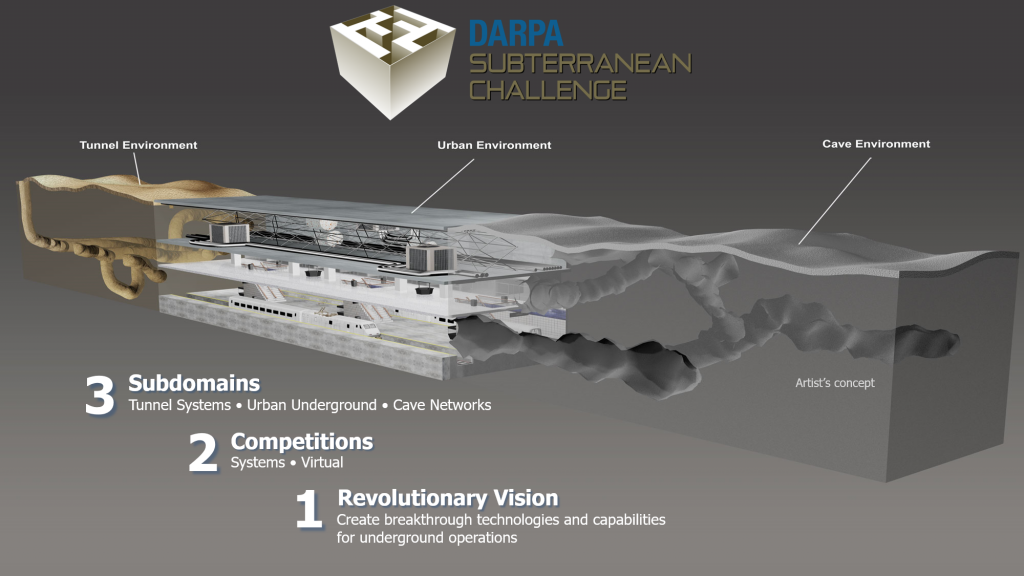
The DARPA Subterranean Challenge planned to develop novel approaches to rapidly map, explore and search underground environments in time-sensitive operations critical for the civilian and military domains alike. In the Final Event, DARPA designed an environment involving branches representing all three challenges of the “Tunnel Circuit”, the “Urban Circuit” and the “Cave Circuit”. Robots had to explore, search for objects (“artifacts”) of interest, and report their accurate location within underground tunnels, infrastructure similar to a subway, and natural caves and paths with extremely confined geometries, tough terrain, and severe visual degradation (including dense smoke).
Team CERBERUS deployed a diverse set of robots with the prime systems being four ANYmal C legged systems. In the Prize Round of the Final Event, the team won the competition and scored 23 points by correctly detecting and localizing 23 of 40 of the artifacts DARPA had placed inside the environment. The second team, “CSIRO Data61” also scored 23 points but reported the last artifact with a slight further delay to DARPA thus the tiebraker was in favor of Team CERBERUS. The third team, “MARBLE” scored 18 points.
The DARPA Subterranean Challenge was one of the rare types of global robotic competition events pushing the frontiers for resilient autonomy and calling teams to develop novel and innovative solutions with the capacity to help critical sectors such as search and rescue personnel and the industry in domains such as mining and beyond. The level of achievement of Team CERBERUS is best understood by looking at all the competitors in the “Systems Competition” of the Final Event. The participating teams including members from top international institutions, namely:
- CERBERUS (Score = 23): University of Nevada, Reno, ETH Zurich, NTNU, University of California Berkeley, Oxford Robotics Institute, Flyability, Sierra Nevada Corporation
- CSIRO Data61 (Score = 23): CSIRO, Emesent, Georgia Institute of Technology
- MARBLE (Score = 18): University of Colorado Boulder, University of Colorado Denver, Scientific Systems Company, University of California Santa Cruz
- Explorer (Score = 17): Carnegie Mellon University, Oregon State University
- CoSTAR (Score = 13): NASA Jet Propulsion Laboratory, California Institute of Technology, MIT, KAIST, Lulea University of Technology
- CTU-CRAS-NORLAB (Score = 7): Czech Technological University, Université Laval
- Coordinated Robotics (Score = 2): Coordinated Robotics, California State University Channel Islands, Oke Onwuka, Sequoia Middle School
- Robotika (Score = 2): Robotika International, Robotika.cz, Czech University of Life Science, Centre for Field Robotics, Cogito Team
We congratulate all members of the team and we are proud of this incredible and historic achievement! Most importantly, we are excited to be part of this amazing community pushing the frontier of resilient robotic autonomy in extreme environments.


