In order to effectively navigate real-world environments, legged robots should be able to move swiftly and freely while maintaining their balance. This is particularly true for humanoid robots, robots with two legs and a human-like body structure.
A new San Francisco-based startup develops AI guidance systems to transform heavy equipment into fully autonomous robots. Their guidance systems are deployed today across the $1 trillion earthmoving industry.
University of Wollongong (UOW) researchers have mimicked the supercoiling properties of DNA to develop a new type of artificial muscle for use in miniature robot applications. Their research is published today in Science Robotics.
In this series of articles, we take robot innovations from their test-lab and bring them to a randomly selected workplace in the outside world. We discovered that Lunar Zebro is not only good for risky endeavours on extraterrestrial terrains, but that these sturdy self-organising little rovers can also simplify the life of hardworking interior decorators.
‘Shoot for the moon’ is taken quite literally by this team of students and professors from TU Delft. “We want to make the exploration of the moon available for a wider audience”, says Pieter van Santvliet, partnerships coordinator at Lunar Zebro. “So we build the world’s smallest and lightest rover.”
And what is the key to making a robust space vehicle as simple and cheap as possible? Korneel Somers, the team’s content creator, says: “The key is to not focus on one thing, but to create an entire system of collaborations”.
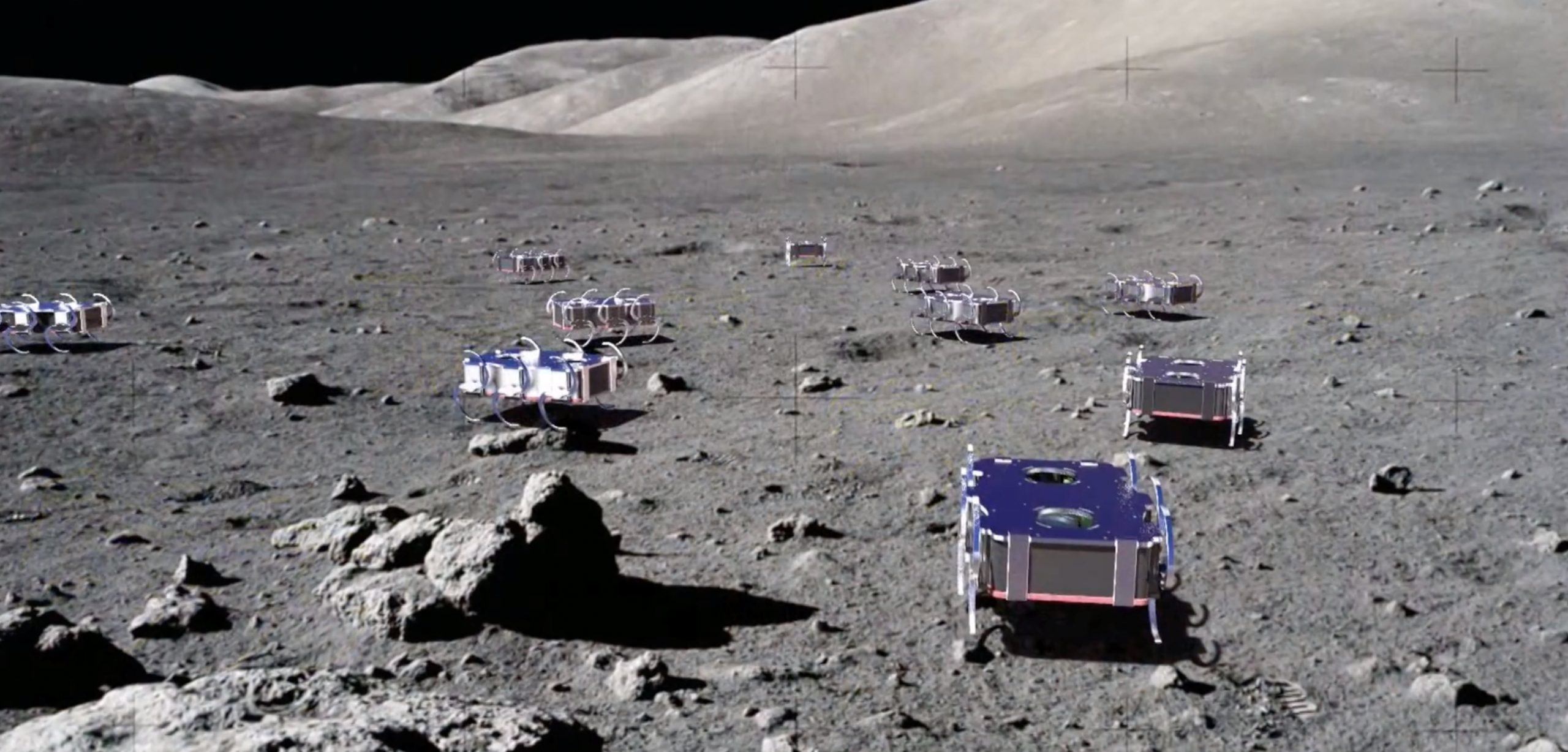
The Lunar Zebro discovering moon-like landscapes in HawaiiA render of how the swarm would look on the moonTesting the Lunar Zebro on a rugged terrain
Genius steals and this project is always looking for existing robotic innovations to combine and improve upon. Zebro’s distinctive C-shaped legs were sourced in this way. These plastic half-circles rotate over the highest point in the C, enabling the robot to take little steps on uneven terrain. The Lunar Zebro Legs Team coordinates these 6 identical parts with a special algorithm, resulting in a walking motion. Other teams are Team Thermal, Team Body, Team Power and so on.
A collection of Lunar Zebro’s on the lawn
Lunar Zebro’s oddly shaped leg allows it to move around rough terrains
The power of the concept manifests itself through the collective. Individually, the rovers have a simple design and are highly customisable. But collectively, they can in theory accomplish complex tasks. Zebros can work in a swarm, each robot making autonomous spur-of-the-moment decisions while the collective is achieving a common goal. And because they are cheap, losing one robot is not the end of the mission.
Sounds good. Current space missions are expensive and therefore highly focused. Affordable robots could open up moon exploration to a much wider range of research projects. Imagine we let rovers swarm the moon’s far side (the quietest radio location near Earth), to look for cosmic signals from intelligent life. Also, the extremely harsh conditions on the moon challenges Lunar Zebro students to become exceptional engineers.
But we are also curious what the Zebros may do on planet earth. Like all inventions, they will surely pop-up in unexpected places. To catch a glimpse of a possible future, we asked a professional decorator: “What would happen if you would use this?”
Selma making a big piece of decorSelma having wall-paper with care for detail
Meet Selma van Gent. An inspiring professional who works as a decorator and interior designer. Which means she builds decors, is trained in decorative painting and is an expert in hanging wall paper. She first tells us she is “anti-computer and actually anti-anything-technological”. But then she sees the Zebros and starts exploring the possibilities of these little machines, and her ideas keep flowing.
Mapping the building site
“When I build something on-site, I have to take into account everything about the entire space”, she explains. “I have to measure distances and corners, estimate what sound does, how high things can be. Sometimes I get bogged down in details.” With a legion of Zebros at her command, Selma could just send them out to map the physical dimensions of the place, while she looks at the overall picture.
Intelligent robotic scaffolding
When she does paper hanging, Selma usually needs a structure to stand on. This scaffolding must be sturdy and safe, but also perfectly tailored so every wall is within reach. It often takes endless tinkering to get it just right. If Zebro rovers would be strong enough, and able to crawl on top of each other and interlock, a swarm of Zebros could be a wonderful self-constructing scaffold says Selma: “If they can analyse the required heights and combine these with my preferences, they could make the entire structure without me. That would be such a relief.”
Always bring me the right tools for the job
Our handy-woman can do all kinds of jobs, and she is blessed with all kinds of tools. Sometimes this blessing becomes a curse. When Selma is painting on Tuesday, and on Wednesday hanging wall-paper, and making props on Thursday, there are so many changes that she doesn’t always have all the right tools with her in the van. “I would tell the rovers what job I had today and they would know which tools I would need,” she says. “And they would stock the van for me and then always bring me the right tools for the job.” This would save a lot of headspace and allow Selma to focus on what she likes to do most.
These cheap robots are now made to explore the moon and withstand the harsh environment of space, but who knows what the future holds? Maybe they will eventually land on planet earth: in the creative spaces of professional decoration.
Below you will find ten different options for controlling linear actuators. This list is intended to give you an overview of what's possible for linear actuator control. It's not exhaustive, there are other options, but these are the ones that will work for most people.
Human beings have the ability to recognize emotions in others. Although perfectly capable of communicating with humans through speech, robots and virtual agents are only good at processing logical instructions, which greatly restricts human-robot interaction (HRI). Consequently, a great deal of research in HRI is about emotion recognition from speech. But first, how do we describe emotions?
A team of researchers affiliated with Seoul National University, Harvard University and Hankook Tire and Technology Co. Ltd., has developed a tire based on an origami design that allows for changing the shape of a tire while a vehicle is moving. In their paper published in the journal Science Robotics, the group describes their new tire design and how well it worked when tested.
The five meter-long Lexus RX-450h leads a rather contemplative life at Empa. It never takes long trips. Instead, the SUV dutifully makes its rounds on a special track just 180 meters long in a secluded backyard of the Empa campus. The scenery is not particularly spectacular: The Mobileye camera behind the windshield sees freshly painted lane markings on aging concrete; the Velodyne lidar scans the window front of always the same lab building at every turn, and the Delphi radar behind the Lexus' radiator grille routinely measures the distance to five tin trash cans set up to either side of the course.
Guide dogs, dogs that are trained to help humans move through their environments, have played a critical role in society for many decades. These highly trained animals, in fact, have proved to be valuable assistants for visually impaired individuals, allowing them to safely navigate indoor and outdoor environments.
Multiple forces are converging to propel this shift toward automating quality control in distribution centers. Retailers must untangle a wide assortment of issues to navigate this shift.
In recent years, computer scientists and roboticists have developed a variety of technological tools to aid human agents during critical missions, such as military operations or search and rescue efforts. Unmanned aerial vehicles (UAVs) have proved to be particularly valuable in these cases, as they can often enter remote or dangerous areas that are inaccessible to humans.
The risk to humans in warehouses is well known with the UK logistics sector reporting around 28,000 non-fatal accidents at work annually but businesses are now realising the risk of safety to highly sophisticated and expensive assets noting that these too require protection.
For scientists to understand the role the changing environment in the Arctic Ocean plays in global climate change, there is a need to map the ocean below the ice cover. Image credits: Troy Barnhart, Chief Petty Officer, U.S. Navy
By Mary Beth Gallagher | Department of Mechanical Engineering
There is a lot of activity beneath the vast, lonely expanses of ice and snow in the Arctic. Climate change has dramatically altered the layer of ice that covers much of the Arctic Ocean. Areas of water that used to be covered by a solid ice pack are now covered by thin layers only 3 feet deep. Beneath the ice, a warm layer of water, part of the Beaufort Lens, has changed the makeup of the aquatic environment.
For scientists to understand the role this changing environment in the Arctic Ocean plays in global climate change, there is a need for mapping the ocean below the ice cover.
A team of MIT engineers and naval officers led by Henrik Schmidt, professor of mechanical and ocean engineering, is trying to understand environmental changes, their impact on acoustic transmission beneath the surface, and how these changes affect navigation and communication for vehicles traveling below the ice.
“Basically, what we want to understand is how does this new Arctic environment brought about by global climate change affect the use of underwater sound for communication, navigation, and sensing?” explains Schmidt.
To answer this question, Schmidt traveled to the Arctic with members of the Laboratory for Autonomous Marine Sensing Systems (LAMSS) including Daniel Goodwin and Bradli Howard, graduate students in the MIT-Woods Hole Oceanographic Institution Joint Program in oceanographic engineering.
With funding from the Office of Naval Research, the team participated in ICEX — or Ice Exercise — 2020, a three-week program hosted by the U.S. Navy, where military personnel, scientists, and engineers work side-by-side executing a variety of research projects and missions.
A strategic waterway
The rapidly changing environment in the Arctic has wide-ranging impacts. In addition to giving researchers more information about the impact of global warming and the effects it has on marine mammals, the thinning ice could potentially open up new shipping lanes and trade routes in areas that were previously untraversable.
Perhaps most crucially for the U.S. Navy, understanding the altered environment also has geopolitical importance.
“If the Arctic environment is changing and we don’t understand it, that could have implications in terms of national security,” says Goodwin.
Several years ago, Schmidt and his colleague Arthur Baggeroer, professor of mechanical and ocean engineering, were among the first to recognize that the warmer waters, part of the Beaufort Lens, coupled with the changing ice composition, impacted how sound traveled in the water.
To successfully navigate throughout the Arctic, the U.S. Navy and other entities in the region need to understand how these changes in sound propagation affect a vehicle’s ability to communicate and navigate through the water.
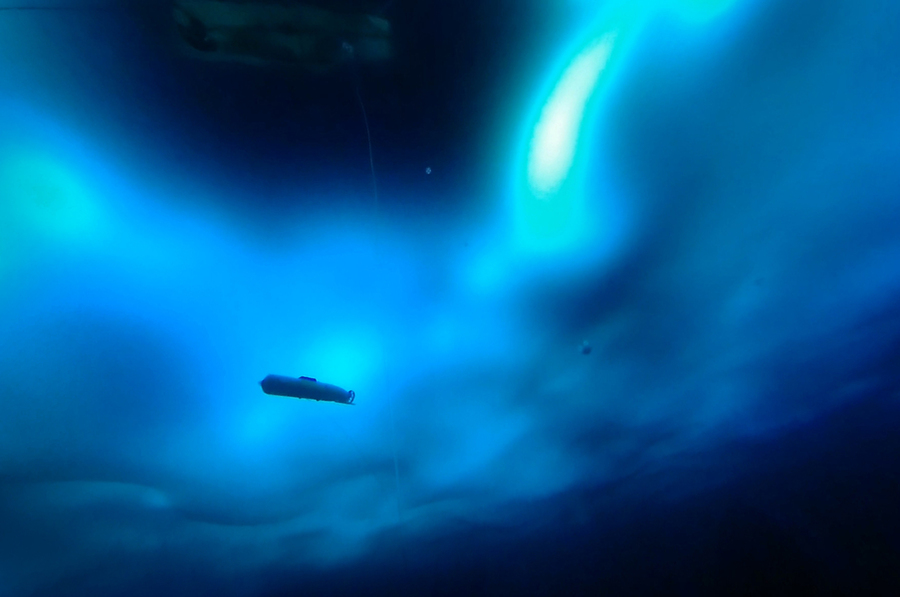
Using an unpiloted, autonomous underwater vehicle (AUV) built by General Dynamics-Mission Systems (GD-MS), and a system of sensors rigged on buoys developed by the Woods Hole Oceanographic Institution, Schmidt and his team, joined by Dan McDonald and Josiah DeLange of GD-MS, set out to demonstrate a new integrated acoustic communication and navigation concept.
The research team prepares to deploy an autonomous underwater vehicle built by General Dynamics Mission Systems to test their navigational concept. Image credits: Daniel Goodwin, LCDR, USN
The framework, which was also supported and developed by LAMSS members Supun Randeni, EeShan Bhatt, Rui Chen, and Oscar Viquez, as well as LAMSS alumnus Toby Schneider of GobySoft LLC, would allow vehicles to travel through the water with GPS-level accuracy while employing oceanographic sensors for data collection.
“In order to prove that you can use this navigational concept in the Arctic, we have to first ensure we fully understand the environment that we’re operating in,” adds Goodwin.
Understanding the environment below
After arriving at the Arctic Submarine Lab’s ice camp last spring, the research team deployed a number of conductivity-temperature-depth probes to gather data about the aquatic environment in the Arctic.
“By using temperature and salinity as a function of depth, we calculate the sound speed profile. This helps us understand if the AUV’s location is good for communication or bad,” says Howard, who was responsible for monitoring environmental changes to the water column throughout ICEX.
A team including professor Henrik Schmidt, MIT-WHOI Joint Program graduate students Daniel Goodwin and Bradli Howard, members of the Laboratory for Autonomous Marine Sensing Systems, and the Arctic Submarine Lab, traveled to the Arctic in March 2020 as part of the ICEX 2020, a three-week program hosted by the U.S. Navy, where military personnel, scientists and engineers work side-by-side executing a variety of research projects and missions. Image credits: MIke Demello, Artict Submarine Laboratory
Because of the way sound bends in water, through a concept known as Snell’s Law, sine-like pressure waves collect in some parts of the water column and disperse in others. Understanding the propagation trajectories is key to predicting good and bad locations for the AUV to operate.
To map the areas of the water with optimal acoustic properties, Howard modified the traditional signal-to-noise-ratio (SNR) by using a metric known as the multi-path penalty (MPP), which penalizes areas where the AUV receives echoes of the messages. As a result, the vehicle prioritizes operations in areas with less reverb.
These data allowed the team to identify exactly where the vehicle should be positioned in the water column for optimal communications which results in accurate navigation.
While Howard gathered data on how the characteristics of the water impact acoustics, Goodwin focused on how sound is projected and reflected off the ever-changing ice on the surface.
To get these data, the AUV was outfitted with a device that measured the motion of the vehicle relative to the ice above. That sound was picked up by several receivers attached to moorings hanging from the ice.
The data from the vehicle and the receivers were then used by the researchers to compute exactly where the vehicle was at a given time. This location information, together with the data Howard gathered on the acoustic environment in the water, offer a new navigational concept for vehicles traveling in the Arctic Sea.
Protecting the Arctic
After a series of setbacks and challenges due to the unforgiving conditions in the Arctic, the team was able to successfully prove their navigational concept worked. Thanks to the team’s efforts, naval operations and future trade vessels may be able to take advantage of the changing conditions in the Arctic to maximize navigational accuracy and improve underwater communications.
After a series of setbacks and challenges due to the unforgiving conditions in the Arctic, the team was able to successfully prove their navigational concept worked. Image credits: Dan McDonald, General Dynamics Mission Systems
“Our work could improve the ability for the U.S. Navy to safely and effectively operate submarines under the ice for extended periods,” Howard says.
Howard acknowledges that in addition to the changes in physical climate, the geopolitical climate continues to change. This only strengthens the need for improved navigation in the Arctic.
“The U.S. Navy’s goal is to preserve peace and protect global trade by ensuring freedom of navigation throughout the world’s oceans,” she adds. “The navigational concept we proved during ICEX will serve to help the Navy in that mission.”
Anyone with children knows that while controlling one child can be hard, controlling many at once can be nearly impossible. Getting swarms of robots to work collectively can be equally challenging, unless researchers carefully choreograph their interactions—like planes in formation—using increasingly sophisticated components and algorithms. But what can be reliably accomplished when the robots on hand are simple, inconsistent, and lack sophisticated programming for coordinated behavior?