Over the past few decades, roboticists have developed systems for a variety of real-world settings, including healthcare facilities. Among their many possible uses in healthcare, robots could help to assist patients in nursing homes or hospitals; for instance, administering medication, food or helping patients to walk.
IoT and mobile app development are two such prospects that industry analysts believe can reshape our lives in significant ways. Collectively, these technologies are expected to dominate the future and bring a never-seen change in enterprises across the niches.
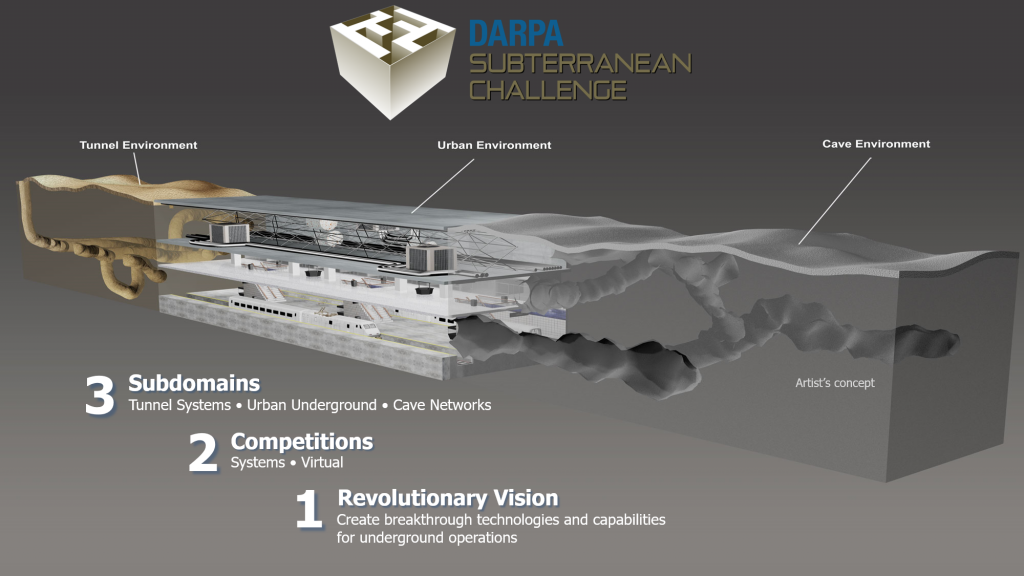
The DARPA Subterranean Challenge planned to develop novel approaches to rapidly map, explore and search underground environments in time-sensitive operations critical for the civilian and military domains alike. In the Final Event, DARPA designed an environment involving branches representing all three challenges of the “Tunnel Circuit”, the “Urban Circuit” and the “Cave Circuit”. Robots had to explore, search for objects (“artifacts”) of interest, and report their accurate location within underground tunnels, infrastructure similar to a subway, and natural caves and paths with extremely confined geometries, tough terrain, and severe visual degradation (including dense smoke).
Team CERBERUS deployed a diverse set of robots with the prime systems being four ANYmal C legged systems. In the Prize Round of the Final Event, the team won the competition and scored 23 points by correctly detecting and localizing 23 of 40 of the artifacts DARPA had placed inside the environment. The second team, “CSIRO Data61” also scored 23 points but reported the last artifact with a slight further delay to DARPA thus the tiebraker was in favor of Team CERBERUS. The third team, “MARBLE” scored 18 points.
The DARPA Subterranean Challenge was one of the rare types of global robotic competition events pushing the frontiers for resilient autonomy and calling teams to develop novel and innovative solutions with the capacity to help critical sectors such as search and rescue personnel and the industry in domains such as mining and beyond. The level of achievement of Team CERBERUS is best understood by looking at all the competitors in the “Systems Competition” of the Final Event. The participating teams including members from top international institutions, namely:
CERBERUS (Score = 23): University of Nevada, Reno, ETH Zurich, NTNU, University of California Berkeley, Oxford Robotics Institute, Flyability, Sierra Nevada Corporation
CSIRO Data61 (Score = 23): CSIRO, Emesent, Georgia Institute of Technology
MARBLE (Score = 18): University of Colorado Boulder, University of Colorado Denver, Scientific Systems Company, University of California Santa Cruz
Explorer (Score = 17): Carnegie Mellon University, Oregon State University
CoSTAR (Score = 13): NASA Jet Propulsion Laboratory, California Institute of Technology, MIT, KAIST, Lulea University of Technology
CTU-CRAS-NORLAB (Score = 7): Czech Technological University, Université Laval
Coordinated Robotics (Score = 2): Coordinated Robotics, California State University Channel Islands, Oke Onwuka, Sequoia Middle School
Robotika (Score = 2): Robotika International, Robotika.cz, Czech University of Life Science, Centre for Field Robotics, Cogito Team
We congratulate all members of the team and we are proud of this incredible and historic achievement! Most importantly, we are excited to be part of this amazing community pushing the frontier of resilient robotic autonomy in extreme environments.
Researchers at Universitat Politecnica de Catalunya in Barcelona have recently developed Baby Robot, a robotic toy that could be used to enhance the motor skills of toddlers. This system, presented in a paper pre-published on arXiv, can interact with toddlers in ways that encourage them to move around, either to try grasping the robot or to run away from it.
Autonomous weapon systems—commonly known as killer robots—may have killed human beings for the first time ever last year, according to a recent United Nations Security Council report on the Libyan civil war. History could well identify this as the starting point of the next major arms race, one that has the potential to be humanity's final one.
As part of a focus project at ETH Zurich, eight Bachelor students built a flying manipulator that can hover in any orientation and grasp objects. The drone is more maneuverable than a quadrocopter and has been designed with the aim of pushing aerial robotics to new heights.
Exoskeleton devices work, researchers say, for a variety of uses such as speeding up our walking or making running easier. Yet they don't know what exactly makes exoskeletons effective. What is the benefit of customization, for example? And how much does simply getting used to the exoskeleton matter? Researchers in the Stanford Biomechatronics Laboratory at Stanford University examined these questions and found that training plays a remarkably significant role in how well exoskeletons provide assistance.
For any Offline Robot Programming solution to be effective, the virtual robot cell set up in the software must be identical to the existing physical robot cell. OCTOPUZ refers to this process as “implementation”.
In this final video of our focus series on IEEE/RSJ IROS 2020 (International Conference on Intelligent Robots and Systems) original series Real Roboticist, you’ll meet Dennis Hong speaking about the robots he and his team have created (locomotion and new ways of moving; an autonomous car for the visually impaired; disaster relief robots), Star Wars and cooking. All in all, ingredients from different worlds that Dennis is using to benefit society.
Dennis Hong is a Professor and the Founding Director of RoMeLa (Robotics & Mechanisms Laboratory) of the Mechanical & Aerospace Engineering Department at UCLA. If you’d like to find out more about how Star Wars influenced his professional career in robotics, how his experience taking a cooking assistant robot to MasterChef USA inspired a multi-million research project, and all the robots he is creating, check out his video below!
The Korea Institute of Machinery and Materials (KIMM), an institute under the jurisdiction of the Ministry of Science and ICT, has developed a flexible, stretchable battery that bends and stretches like a snake. This new battery could have a wide range of uses, such as in energy storage technology and disaster situations, with applications in various types of devices, from soft robots to wearable devices.
Today, 100 miles off the coast of Texas, a 10-foot-long yellow autonomous glider is riding waves as it patrols the perimeter above the NOAA Flower Garden Banks National Marine Sanctuary.
The Smart Factory at Wichita (TSF@W) provides a risk-free environment for companies to explore the art of the possible and gain insight into the latest technologies through an immersive, hands-on experience.
To operate efficiently in urban environments, mobile robots and other autonomous systems should be able to move safely on sidewalks and avoid collisions with pedestrians or other obstacles. This is particularly true for delivery robots or systems that are specifically programmed to patrol urban environments.
How do humans become so skillful? Well, initially we are not, but from infancy, we discover and practice increasingly complex skills through self-supervised play. But this play is not random – the child development literature suggests that infants use their prior experience to conduct directed exploration of affordances like movability, suckability, graspability, and digestibility through interaction and sensory feedback. This type of affordance directed exploration allows infants to learn both what can be done in a given environment and how to do it. Can we instantiate an analogous strategy in a robotic learning system?
On the left we see videos from a prior dataset collected with a robot accomplishing various tasks such as drawer opening and closing, as well as grasping and relocating objects. On the right we have a lid that the robot has never seen before. The robot has been granted a short period of time to practice with the new object, after which it will be given a goal image and tasked with making the scene match this image. How can the robot rapidly learn to manipulate the environment and grasp this lid without any external supervision?