By Tully Foote
We are excited to show off a simulation of a Prius in Mcity using ROS Kinetic and Gazebo 8. ROS enabled the simulation to be developed faster by using existing software and libraries. The vehicle’s throttle, brake, steering, and transmission are controlled by publishing to a ROS topic. All sensor data is published using ROS, and can be visualized with RViz.
We leveraged Gazebo’s capabilities to incorporate existing models and sensors.
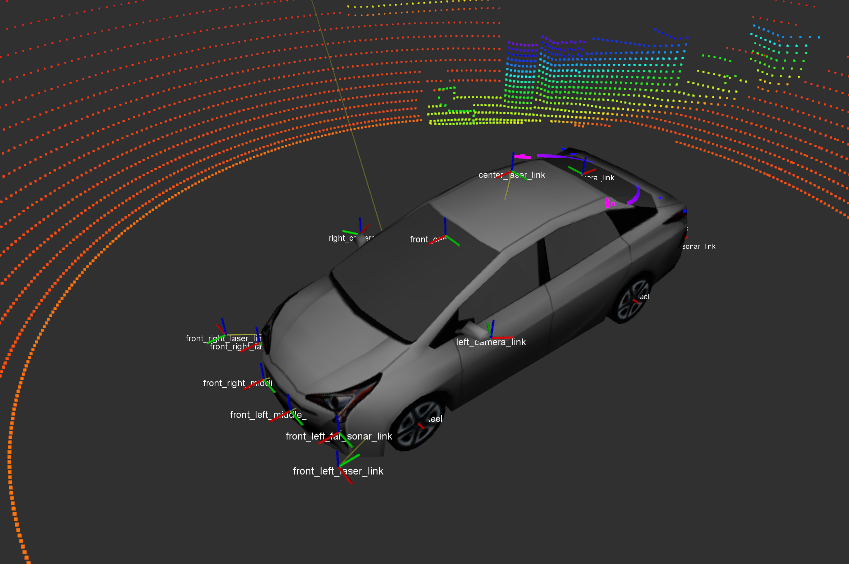
The world contains a new model of Mcity and a freeway interchange. There are also models from the gazebo models repository including dumpsters, traffic cones, and a gas station. On the vehicle itself there is a 16 beam lidar on the roof, 8 ultrasonic sensors, 4 cameras, and 2 planar lidar.
The simulation is open source and available at on GitHub at osrf/car_demo. Try it out by installing nvidia-docker and pulling “osrf/car_demo” from Docker Hub. More information about building and running is available in the README in the source repository.