“Girls of Steel Robotics (featured 2014) was founded in 2010 at Carnegie Mellon University’s Field Robotics Center as FRC Team 3504. The organization now serves multiple FIRST robotics teams offering STEM opportunities for people of all ages.
Since 2019, Girls of Steel also organizes FIRST Ladies, an online community for anyone involved in FIRST robotics programs who supports girls and women in STEM. Their mission statement reflects their commitment to empowering everyone for success in STEM: “Girls of Steel empowers everyone, especially women and girls, to believe they are capable of success in STEM.”
Girls of Steel celebrated their 10th year in FIRST robotics with a Virtual Gala in May 2020 featuring a panel of four Girls of Steel alumni showcasing a range of STEM opportunities. One is a PhD student in Robotics at CMU, two are working as engineers, and one is a computer science teacher. Girls of Steel are extremely proud of their alumni, of whom 80% are studying or working in STEM fields.
In August 2020, Girls of Steel successfully organized 3 weeks of virtual summer camps and were also able to run 4 teams in a virtual FIRST LEGO League program from September 2020. Girls of Steel also restructured their FIRST team and launched two new sub teams; Advocacy and Diversity, Equity, and Inclusion (DEI) focusing on continuing their efforts to advocate for after-school STEM programs, and for creating an inclusive environment that welcomes all Girls of Steel members. The DEI sub team manages a suggestion box where members can anonymously post ideas for team improvements.
In 2016, Robohub published a follow up on the Girls of Steel and their achievements.
In 2017, Girls of Steel won the 2017 Engineering Inspiration award (Greater Pittsburgh Regional), which “celebrates outstanding success in advancing respect and appreciation for engineering within a team’s school and community.”
In 2018, Girls of Steel won the 2018 Regional Chairman’s Award (Greater Pittsburgh Regional), the most prestigious award at FIRST, it honors the team that best represents a model for other teams to emulate and best embodies the purpose and goals of FIRST.
In 2019, Girls of Steel won the 2019 Gracious Professionalism Award (Greater Pittsburgh Regional), which celebrates the outstanding demonstration of FIRST Core Values such as continuous Gracious Professionalism and working together both on and off the playing field.
And in 2020, Girls of Steel members, Anna N. and Norah O., received 2020 Dean’s List Finalist Awards (Greater Pittsburgh Regional) which reflects their ability to lead their teams and communities to increased awareness for FIRST and its mission while achieving personal technical expertise and accomplishment.
Clearly, all the Girls of Steel over the last ten years are winners. Many women in robotics today point to an early experience in a robotics competition as the turning point when they decided that STEM, particularly robotics, was going to be in their future. We want to thank all the Girls of Steel for being such great role models, and sharing the joy and fun of building robots with other girls/women. It’s working! (And it’s worth it!)
Want to keep reading? There are 180 more stories on our 2013 to 2020 lists. Why not nominate someone for inclusion next year!
And we encourage #womeninrobotics and women who’d like to work in robotics to join our professional network at http://womeninrobotics.org
A new type of energy-generating synthetic skin could create more affordable prosthetic limbs and robots capable of mimicking the sense of touch, scientists say.
What if you could ride your own giant LEGO electric skateboard, make a synthesizer that you can play with a barcode reader, or build a strong robot dog based on the Boston Dynamics dog robot? Today sees the start of a new series of videos that focuses on James Bruton’s open source robot projects.
I discovered James’ impressive work in this episode of Ricardo Tellez’s ROS Developers Podcast on The Construct, which I highly recommend. Whether you enjoy getting your hands dirty with CAD files, 3D-printed parts, arduinos, motors and code, or you like learning about the full research & development (R&D) process of a robotics project, you will have loads of hours of fun following this series.
Today I brought one of James’ coolest and most successful open source projects: openDog and its different versions. In James’ own words, “if you want your very own four-legged friend to play fetch with and go on long walks then this is the perfect project for you.” You can access all the CAD files and code here. And without further ado, here’s the full YouTube playlist of the first version of openDog:
James also released another series of videos developing an affordable version of openDog: Mini Robot Dog. This robot is half the size of openDog and its mechanical components and 3D-printed parts are much more cheaper than the former robot without sacrificing compliance. You can see the full development in the playlist below, and access the open source files of version 1 and version 2.
Based on the insight gained through the R&D of openDog, Mini Robot Dog and these test dogs, James built the ultimate robot dog: openDog V2. For this improved version of openDog, he used brushless motors which can be back-driven to increase compliance. And by adding an Inertial Measurements Unit, he improved the balance of the robot. CAD files and code are available here. If you want to find out whether the robot is able to walk, check out the openDog V2 video series:
If you like James Bruton’s project, you can check out his website for more resources, updates and support options. See you in the next episode of our focus series!
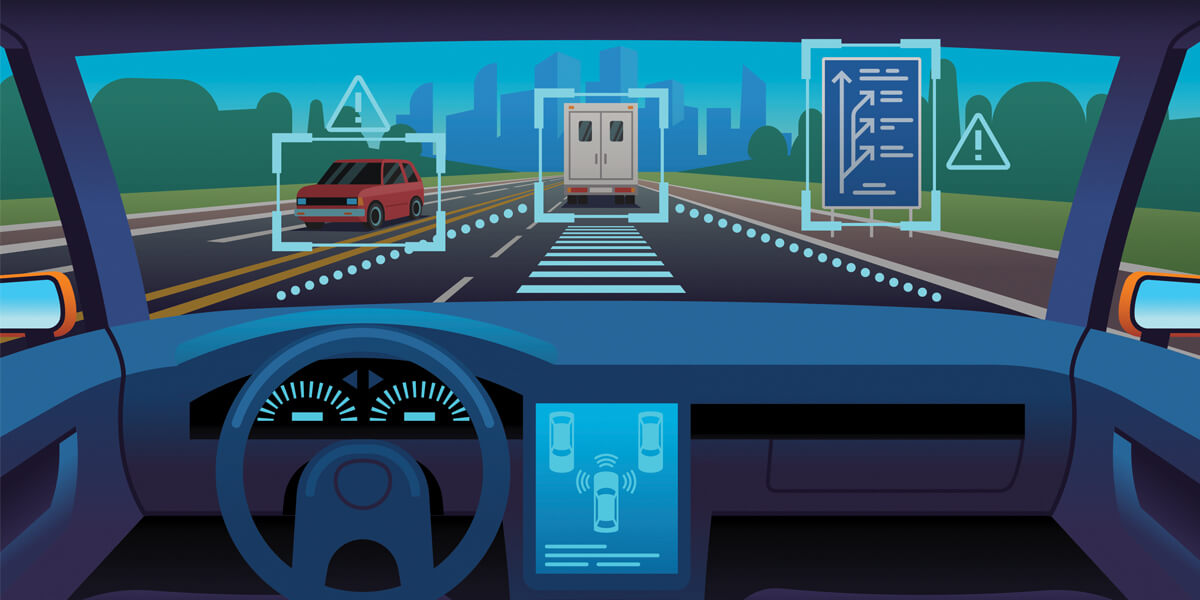
If robots could learn from watching demonstrations, your self-driving car could learn how to drive safely by watching you drive around your neighborhood. Photo/iStock.
By Caitlin Dawson
USC researchers have developed a method that could allow robots to learn new tasks, like setting a table or driving a car, from observing a small number of demonstrations.
Imagine if robots could learn from watching demonstrations: you could show a domestic robot how to do routine chores or set a dinner table. In the workplace, you could train robots like new employees, showing them how to perform many duties. On the road, your self-driving car could learn how to drive safely by watching you drive around your neighborhood.
Making progress on that vision, USC researchers have designed a system that lets robots autonomously learn complicated tasks from a very small number of demonstrations—even imperfect ones. The paper, titled Learning from Demonstrations Using Signal Temporal Logic, was presented at the Conference on Robot Learning (CoRL), Nov. 18.
The researchers’ system works by evaluating the quality of each demonstration, so it learns from the mistakes it sees, as well as the successes. While current state-of-art methods need at least 100 demonstrations to nail a specific task, this new method allows robots to learn from only a handful of demonstrations. It also allows robots to learn more intuitively, the way humans learn from each other — you watch someone execute a task, even imperfectly, then try yourself. It doesn’t have to be a “perfect” demonstration for humans to glean knowledge from watching each other.
“Many machine learning and reinforcement learning systems require large amounts of data data and hundreds of demonstrations—you need a human to demonstrate over and over again, which is not feasible,” said lead author Aniruddh Puranic, a Ph.D. student in computer science at the USC Viterbi School of Engineering.
“Also, most people don’t have programming knowledge to explicitly state what the robot needs to do, and a human cannot possibly demonstrate everything that a robot needs to know. What if the robot encounters something it hasn’t seen before? This is a key challenge.”
Above: Using the USC researchers’ method, an autonomous driving system would still be able to learn safe driving skills from “watching” imperfect demonstrations, such this driving demonstration on a racetrack. Source credits: Driver demonstrations were provided through the Udacity Self-Driving Car Simulator.
Learning from demonstrations
Learning from demonstrations is becoming increasingly popular in obtaining effective robot control policies — which control the robot’s movements — for complex tasks. But it is susceptible to imperfections in demonstrations and also raises safety concerns as robots may learn unsafe or undesirable actions.
Also, not all demonstrations are equal: some demonstrations are a better indicator of desired behavior than others and the quality of the demonstrations often depends on the expertise of the user providing the demonstrations.
To address these issues, the researchers integrated “signal temporal logic” or STL to evaluate the quality of demonstrations and automatically rank them to create inherent rewards.
In other words, even if some parts of the demonstrations do not make any sense based on the logic requirements, using this method, the robot can still learn from the imperfect parts. In a way, the system is coming to its own conclusion about the accuracy or success of a demonstration.
“Let’s say robots learn from different types of demonstrations — it could be a hands-on demonstration, videos, or simulations — if I do something that is very unsafe, standard approaches will do one of two things: either, they will completely disregard it, or even worse, the robot will learn the wrong thing,” said co-author Stefanos Nikolaidis, a USC Viterbi assistant professor of computer science.
“In contrast, in a very intelligent way, this work uses some common sense reasoning in the form of logic to understand which parts of the demonstration are good and which parts are not. In essence, this is exactly what also humans do.”
Take, for example, a driving demonstration where someone skips a stop sign. This would be ranked lower by the system than a demonstration of a good driver. But, if during this demonstration, the driver does something intelligent — for instance, applies their brakes to avoid a crash — the robot will still learn from this smart action.
Adapting to human preferences
Signal temporal logic is an expressive mathematical symbolic language that enables robotic reasoning about current and future outcomes. While previous research in this area has used “linear temporal logic”, STL is preferable in this case, said Jyo Deshmukh, a former Toyota engineer and USC Viterbi assistant professor of computer science .
“When we go into the world of cyber physical systems, like robots and self-driving cars, where time is crucial, linear temporal logic becomes a bit cumbersome, because it reasons about sequences of true/false values for variables, while STL allows reasoning about physical signals.”
Puranic, who is advised by Deshmukh, came up with the idea after taking a hands-on robotics class with Nikolaidis, who has been working on developing robots to learn from YouTube videos. The trio decided to test it out. All three said they were surprised by the extent of the system’s success and the professors both credit Puranic for his hard work.
“Compared to a state-of-the-art algorithm, being used extensively in many robotics applications, you see an order of magnitude difference in how many demonstrations are required,” said Nikolaidis.
The system was tested using a Minecraft-style game simulator, but the researchers said the system could also learn from driving simulators and eventually even videos. Next, the researchers hope to try it out on real robots. They said this approach is well suited for applications where maps are known beforehand but there are dynamic obstacles in the map: robots in household environments, warehouses or even space exploration rovers.
“If we want robots to be good teammates and help people, first they need to learn and adapt to human preference very efficiently,” said Nikolaidis. “Our method provides that.”
“I’m excited to integrate this approach into robotic systems to help them efficiently learn from demonstrations, but also effectively help human teammates in a collaborative task.”
Robots are rolling out into the real world and we need to meet the emerging challenges in responsible fashion but one that doesn’t block innovation. At the recent ARM Developers Summit 2020 I shared my suggestions for five practical steps that we could undertake at a regional, national or global level as part of the Five Laws of Robotics presentation (below).
The Five Laws of Robotics are drawn from the EPSRC Principles of Robotics, first developed in 2010 and a living document workshopped by experts across many relevant disciplines. These five principles are practical and concise, embracing the majority of principles expressed across a wide range of ethics documents. I will explain in more detail.
There should be no killer robots.
Robots should (be designed to) obey the law.
Robots should (be designed to) be good products.
Robots should be transparent in operation
Robots should be identifiable
EPSRC says that robots are multi-use tools. Robots should not be designed solely or primarily to kill or harm humans, except in the interests of national security. More information is at the Campaign to Stop Killer Robots.
Humans, not robots, are the responsible agents. Robots should be designed and operated as far as is practicable to comply with existing laws and fundamental rights and freedoms, including privacy.
Robots are products. They should be designed using processes which assure their safety and security. Quality guidelines, processes and standards already exist.
Robots are manufactured artefacts. They should not be designed in a deceptive way to exploit users, instead their machine nature should be made transparent.
It should be possible to find out who is responsible for any robot. My suggestion here is that robots in public spaces require a license plate; a clear identification of robot and the responsible organization.
As well as speaking about Five Laws of Robotics, I introduced five practical proposals to help us respond at a regional, national and global level.
Robot Registry (license plates, access to database of owners/operators)
Algorithmic Transparency (via Model Cards and Testing Benchmarks)
Independent Ethical Review Boards (as in biotech industry)
Robot Ombudspeople to liaise between public and policy makers
Rewarding Good Robots design awards and case studies
Silicon Valley Robotics is about to announce the first winners of our inaugural Robotics Industry Awards. The SVR Industry Awards consider the responsible design as well as technological innovation and commercial success. There are also some ethical checkmark or certification initiatives under preparation, but like the development of new standards, these can take a long time to do properly, whereas awards, endorsements and case studies can be available immediately to foster the discussion of what constitutes good robots and what are the social challenges that robotics needs to solve.
In fact, the robot registry suggestion was picked up recently by Stacey Higginbotham in the IEEE Spectrum. Silicon Valley Robotics is putting together these policy suggestions for the new White House administration.
What is transfer learning? How can it help us classify and segment different types of medical images? Are pretrained computer vision models useful for medical imaging tasks? How is 2D image classification different from 3D MRI segmentation in terms of transfer learning?
Generating accurate height data of boxes relative to the conveyor system is challenging to achieve with a single measurement tool. More often than not, this requires additional system configuration and potentially scripting.
Researchers at ETH Zurich have developed a technique for manufacturing micrometer-long machines by interlocking multiple materials in a complex way. Such microrobots will one day revolutionize the field of medicine.
With the RTS Hypervisor, you can run a variety of real-time and general purpose operating systems on a single hardware platform. Benefits: Reduced hardware costs, energy consumption, cabling and space.
Our focus in this article is on the creation of customized automated workholding and material-handling solutions and the steps that must be completed from drawing board to final construction in order to ensure that the needs of the end user will be successfully met.
When robots and humans interact in a shared environment, it is important for them to move in ways that prevent collisions or accidents. To reduce the risk of collisions, roboticists have developed numerous of techniques that monitor an environment, predict the future actions of humans moving in it, identify safe trajectories for a robot and control its movements accordingly.
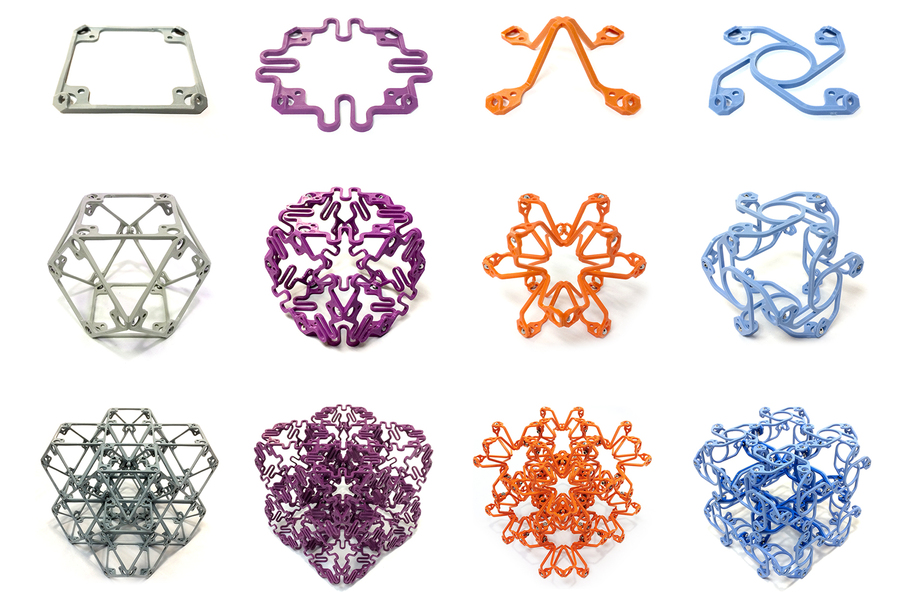
CBA researchers have created four different types of novel subunits, called voxels (a 3D variation on the pixels of a 2D image). Left to right: rigid (grey), compliant (purple), auxetic (orange), chiral (blue). Image credits: Benjamin Jenett, CBA
By David L. Chandler
Researchers at MIT’s Center for Bits and Atoms have created tiny building blocks that exhibit a variety of unique mechanical properties, such as the ability to produce a twisting motion when squeezed. These subunits could potentially be assembled by tiny robots into a nearly limitless variety of objects with built-in functionality, including vehicles, large industrial parts, or specialized robots that can be repeatedly reassembled in different forms.
The researchers created four different types of these subunits, called voxels (a 3D variation on the pixels of a 2D image). Each voxel type exhibits special properties not found in typical natural materials, and in combination they can be used to make devices that respond to environmental stimuli in predictable ways. Examples might include airplane wings or turbine blades that respond to changes in air pressure or wind speed by changing their overall shape.
The findings, which detail the creation of a family of discrete “mechanical metamaterials,” are described in a paper published in the journal Science Advances, authored by recent MIT doctoral graduate Benjamin Jenett PhD ’20, Professor Neil Gershenfeld, and four others.
“This remarkable, fundamental, and beautiful synthesis promises to revolutionize the cost, tailorability, and functional efficiency of ultralight, materials-frugal structures,” says Amory Lovins, an adjunct professor of civil and environmental engineering at Stanford University and founder of Rocky Mountain Institute, who was not associated with this work.
Metamaterials get their name because their large-scale properties are different from the microlevel properties of their component materials. They are used in electromagnetics and as “architected” materials, which are designed at the level of their microstructure. “But there hasn’t been much done on creating macroscopic mechanical properties as a metamaterial,” Gershenfeld says.
With this approach, engineers should be able to build structures incorporating a wide range of material properties — and produce them all using the same shared production and assembly processes, Gershenfeld says.
The voxels are assembled from flat frame pieces of injection-molded polymers, then combined into three-dimensional shapes that can be joined into larger functional structures. They are mostly open space and thus provide an extremely lightweight but rigid framework when assembled. Besides the basic rigid unit, which provides an exceptional combination of strength and light weight, there are three other variations of these voxels, each with a different unusual property.
The “auxetic” voxels have a strange property in which a cube of the material, when compressed, instead of bulging out at the sides, actually bulges inward. This is the first demonstration of such a material produced through conventional and inexpensive manufacturing methods.
There are also “compliant” voxels, with a zero Poisson ratio, which is somewhat similar to the auxetic property, but in this case, when the material is compressed, the sides do not change shape at all. Few known materials exhibit this property, which can now be produced through this new approach.
Finally, “chiral” voxels respond to axial compression or stretching with a twisting motion. Again, this is an uncommon property; research that produced one such material through complex fabrication techniques was hailed last year as a significant finding. This work makes this property easily accessible at macroscopic scales.
“Each type of material property we’re showing has previously been its own field,” Gershenfeld says. “People would write papers on just that one property. This is the first thing that shows all of them in one single system.”
To demonstrate the real-world potential of large objects constructed in a LEGO-like manner out of these mass-produced voxels, the team, working in collaboration with engineers at Toyota, produced a functional super-mileage race car, which they demonstrated on a rece track during an international robotics conference earlier this year.
They were able to assemble the lightweight, high-performance structure in just a month, Jenett says, whereas building a comparable structure using conventional fiberglass construction methods had previously taken a year.
During the race, the track was slick from rain, and the race car ended up crashing into a barrier. To the surprise of everyone involved, the car’s lattice-like internal structure deformed and then bounced back, absorbing the shock with little damage. A conventionally built car, Jenett says, would likely have been severely dented if it was made of metal, or shattered if it was composite.
The car provided a vivid demonstration of the fact that these tiny parts can indeed be used to make functional devices at human-sized scales. And, Gershenfeld points out, in the structure of the car, “these aren’t parts connected to something else. The whole thing is made out of nothing but these parts,” except for the motors and power supply.
Because the voxels are uniform in size and composition, they can be combined in any way needed to provide different functions for the resulting device. “We can span a wide range of material properties that before now have been considered very specialized,” Gershenfeld says. “The point is that you don’t have to pick one property. You can make, for example, robots that bend in one direction and are stiff in another direction and move only in certain ways. And so, the big change over our earlier work is this ability to span multiple mechanical material properties, that before now have been considered in isolation.”
Jenett, who carried out much of this work as the basis for his doctoral thesis, says “these parts are low-cost, easily produced, and very fast to assemble, and you get this range of properties all in one system. They’re all compatible with each other, so there’s all these different types of exotic properties, but they all play well with each other in the same scalable, inexpensive system.”
“Think about all the rigid parts and moving parts in cars and robots and boats and planes,” Gershenfeld says. “And we can span all of that with this one system.”
A key factor is that a structure made up of one type of these voxels will behave exactly the same way as the subunit itself, Jenett says. “We were able to demonstrate that the joints effectively disappear when you assemble the parts together. It behaves as a continuum, monolithic material.”
Whereas robotics research has tended to be divided between hard and soft robots, “this is very much neither,” Gershenfeld says, because of its potential to mix and match these properties within a single device.
One of the possible early application of this technology, Jenett says, could be for building the blades of wind turbines. As these structures become ever larger, transporting the blades to their operating site becomes a serious logistical issue, whereas if they are assembled from thousands of tiny subunits, that job can be done at the site, eliminating the transportation issue. Similarly, the disposal of used turbine blades is already becoming a serious problem because of their large size and lack of recyclability. But blades made up of tiny voxels could be disassembled on site, and the voxels then reused to make something else.
And in addition, the blades themselves could be more efficient, because they could have a mix of mechanical properties designed into the structure that would allow them to respond dynamically, passively, to changes in wind strength, he says.
Overall, Jenett says, “Now we have this low-cost, scalable system, so we can design whatever we want to. We can do quadrupeds, we can do swimming robots, we can do flying robots. That flexibility is one of the key benefits of the system.”
Stanford’s Lovins says that this technology “could make inexpensive, durable, extraordinarily lightweight aeronautical flight surfaces that passively and continuously optimize their shape like a bird’s wing. It could also make automobiles’ empty mass more nearly approach their payload, as their crashworthy structure becomes mostly air. It may even permit spherical shells whose crush strength allows a vacuum balloon (with no helium) buoyant in the atmosphere to lift a couple of dozen times the net payload of a jumbo jet.”
He adds, “Like biomimicry and integrative design, this new art of cellular metamaterials is a powerful new tool for helping us do more with less.”
The research team included Filippos Tourlomousis, Alfonso Parra Rubio, and Megan Ochalek at MIT, and Christopher Cameron at the U.S. Army Research Laboratory. The work was supported by NASA, the U.S. Army Research Laboratory and the Center for Bits and Atoms Consortia.
With the emergence of the COVID-19 pandemic, the entire world came to a screeching halt. The industrial robotics market also experienced a drastic downfall. However, the industry is expected to regain its grasp by 2022, looking at the increasing demand for industrial robots.
“Girls are natural engineers, highly capable in maths and physics. We need to show them that these tools can be used to design a better world.So far, we’ve done a poor job of communicating to girls the very powerful impact they can make through an engineering career.” Croft continues, providing us with the inspiration to introduce the second of our new series of Women in Robotics Updates, featuring Elizabeth Croft, Helen Greiner and Heather Knight from our first “25 women in robotics you need to know about” list in 2013.
Elizabeth CroftDean and Faculty of Engineering at Monash University
Elizabeth Croft (featured 2013) is now a Dean and Faculty of Engineering division at Monash University in Australia, advancing human-robot interaction, industrial robotics, trajectory generation and diversity in STEM. Previously she was the Founding Director of the Collaborative Advanced Robotics and Intelligent Systems Laboratory at the University of British Columbia (UBC). As the Marshall Bauder Professor in Engineering Economics, Business and Management Training from 2015-2017, she launched the Master of Engineering Leadership degrees at the UBC.
Recognized as one of the 100 most powerful women in Canada in 2014 by Women’s Executive Network, Croft also received the RA McLachlan Peak Career Award for Professional Engineering in the Province of British Columbia, Canada in 2018. She is a fellow of the ASME, Engineers Australia, Engineers Canada, and the Canadian Academy of Engineering. She is also the recipient of other awards such as the Wendy MacDonald Award, Diversity Champion, Vancouver Board of Trade of 2016, and Just Desserts Award of University British Columbia, Alma Mater Society in 2015. She has more than 200 research publications and almost 6000 citations.
She is an advocate for women in Engineering and has an exceptional record of propelling women’s representation and participation in engineering. As the Natural Sciences and Engineering Research Council Chair for Women in Science and Engineering (2010-2015), she worked with partners in funding agencies, industry, academe, and the education system on comprehensive strategies to improve women’s participation and retention in the STEM disciplines at all levels. During this period Croft successfully increased female enrollment in Engineering to 30%.
Helen GreinerCEO, Cofounder and Founder of Tertill, iRobot and Cyphy Works
Helen Greiner (featured in 2013), is now a founder of Tertill , in addition to founding iRobot and CyPhy Works (aka Aria Insights). Tertill is a solar-powered, weed-snipping robot for home gardens patrolling throughout the day and looks somewhat like an outdoor Roomba, one of the products from iRobot, the world’s first commercially successful consumer robotics product.
Greiner has received numerous awards and accolades, including being named an “Innovator for the Next Century” by Technology Review Magazine. She received the DEMO God Award at the DEMO Conference in 2014 and was named a Presidential Ambassador for Global Leadership (PAGE) by US President, Barack Obama and US Secretary of Commerce, Penny Pritzker. She was recognized for leadership in the design, development, and application of practical robots by the National Academy of Engineering, and was named “woman of the year” at Wentworth Institute of Technology in 2018. In 2018, she was also sworn in as a Highly Qualified Expert for the US Army. You can hear her speak in 2021 at the finals of the $2m GoFly competition .
As a child Greiner became fascinated by the robots of StarWars, particularly the three-foot-tall spunky R2D2. Says Greiner “He had moods, emotions, and dare I say, his own agenda. This was exciting to me—he was a creature, an artificial creature.” Consistently pioneering in building the helping robots to perform dull, dirty and dangerous jobs and launching robotics into the consumer market since 2008, she says, “If we don’t take robots to the next level, we’ll have a lot of explaining to do to our grandchildren.”
Heather KnightAssistant Professor at Oregon State University
Heather Knight, (featured 2013) is now an Assistant Professor in the Computer Science department at Oregon State University and directs the CHARISMA* Research Lab. In CHARISMA Research Lab, she operationalizes methods for the performing arts to make more emotive and engaging robots, exploring minimal social robots, robot ethics, charismatic machines, and multi-robot/multi-human social interaction.
Knight has presented a TED talk: Silicon-Based Comedy in 2010 where she demonstrated a robot stand-up comedian “Data” which has gotten almost 1 million views. She was mentioned in Forbes List’s 30 under 30 in Science and named one of AdWeek’s top 100 creatives in 2017. In 2017, she was also a Robotic Artist in Residence at X, the Moonshot Factory. Her installations have been featured at the Smithsonian-Cooper Hewitt Design Museum, TED, Pop! Tech, LACMA, SIGGRAPH, and the Fortezza da Basso in Florence, Italy. She is also the Assistant Director of Robotics at Humanity+ and a fellow at the Hybrid Realities Institute and a National Science Foundation (NSF) Fellow.
She is also a founder of Marilyn Monrobot, a robot theater company performing comedy, dance and even Rube Goldberg Machine installations. Here, she successfully organizes the annual ‘Robot Film Festival’ which awards Botskers to various robot films and robot film stars. The film archives make for great viewing.
Want to keep reading? There are 180 more stories on our 2013 to 2020 lists. Why not nominate someone for inclusion next year!
And we encourage #womeninrobotics and women who’d like to work in robotics to join our professional network at http://womeninrobotics.org