 The Humanoids 2017 conference earlier this month hosted an excellent photo competition. I was lucky to be one of the judges, along with Erico Guizzo from IEEE Spectrum, and Giorgio Metta as awards chair.
The Humanoids 2017 conference earlier this month hosted an excellent photo competition. I was lucky to be one of the judges, along with Erico Guizzo from IEEE Spectrum, and Giorgio Metta as awards chair.
The decision, which was tough given the excellent submissions, was based on social media votes and scores for originality, creativity, photo structure, and tech or fun factor.
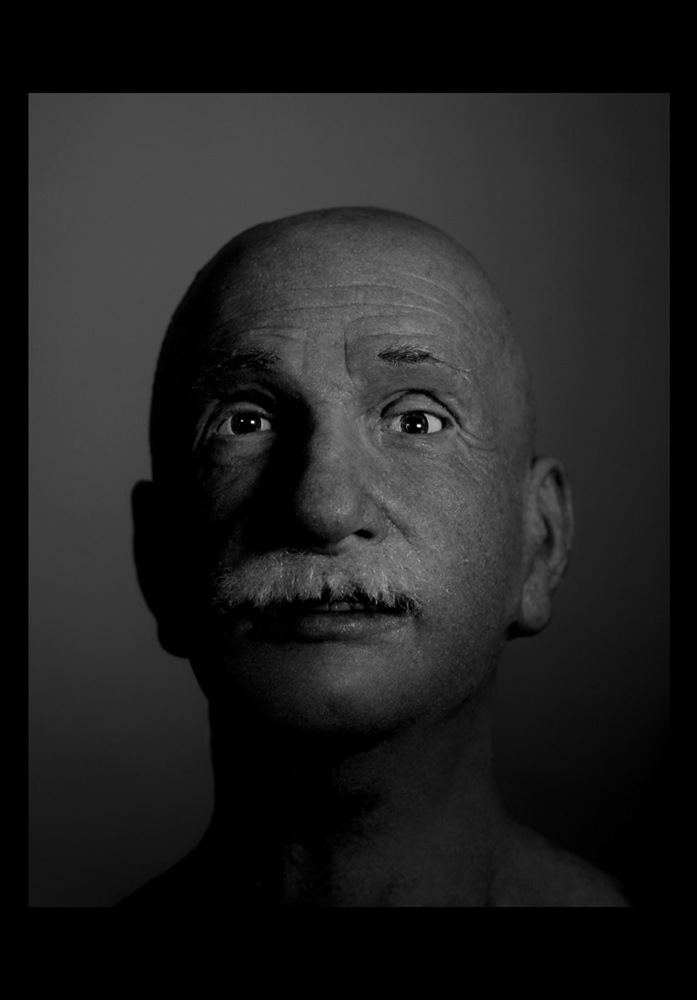
The overall winner for Best Humanoid Photo featured a pensive iCub and was entitled “To be, or not to be” by Pedro Vicente from the Vislab in Lisbon.
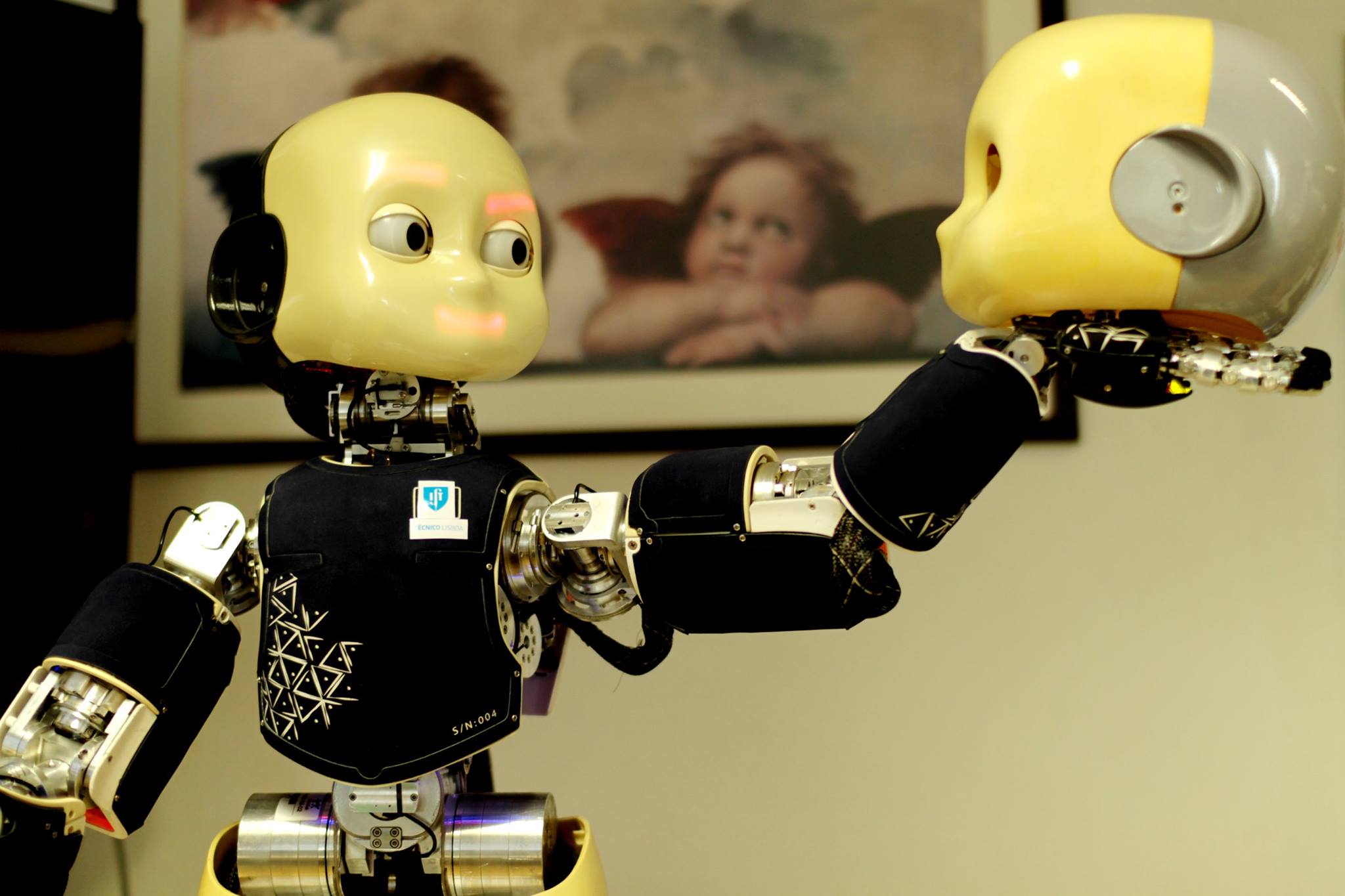
Robot: iCub
Photo by: Pedro Vicente, Vislab@ISR-Lisboa
Finalists, in no particular order, were:

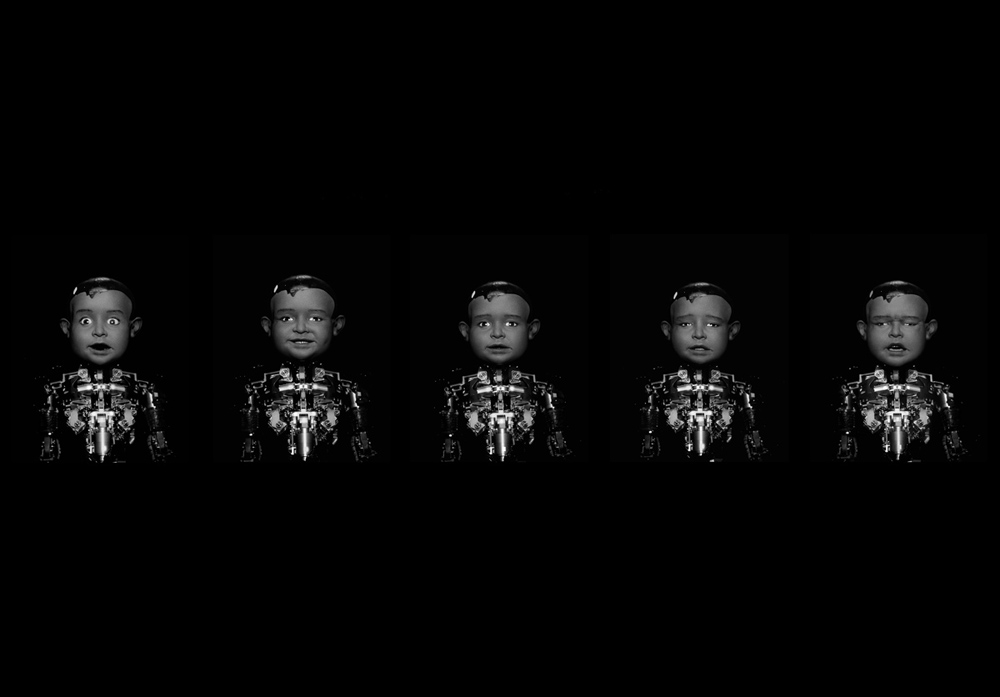
Robot: NICO ( Neuro-Inspired COmpanion )
Photo by: Erik Strahl, Universität Hamburg (University of Hamburg, Germany).

Robot: Toro, LRU
Photo by: Maximo A. Roa, Christian Ott, Johannes Englsberger, Bernd Henze, Alexander Werner, Oliver Porges, DLR – German Aerospace Center

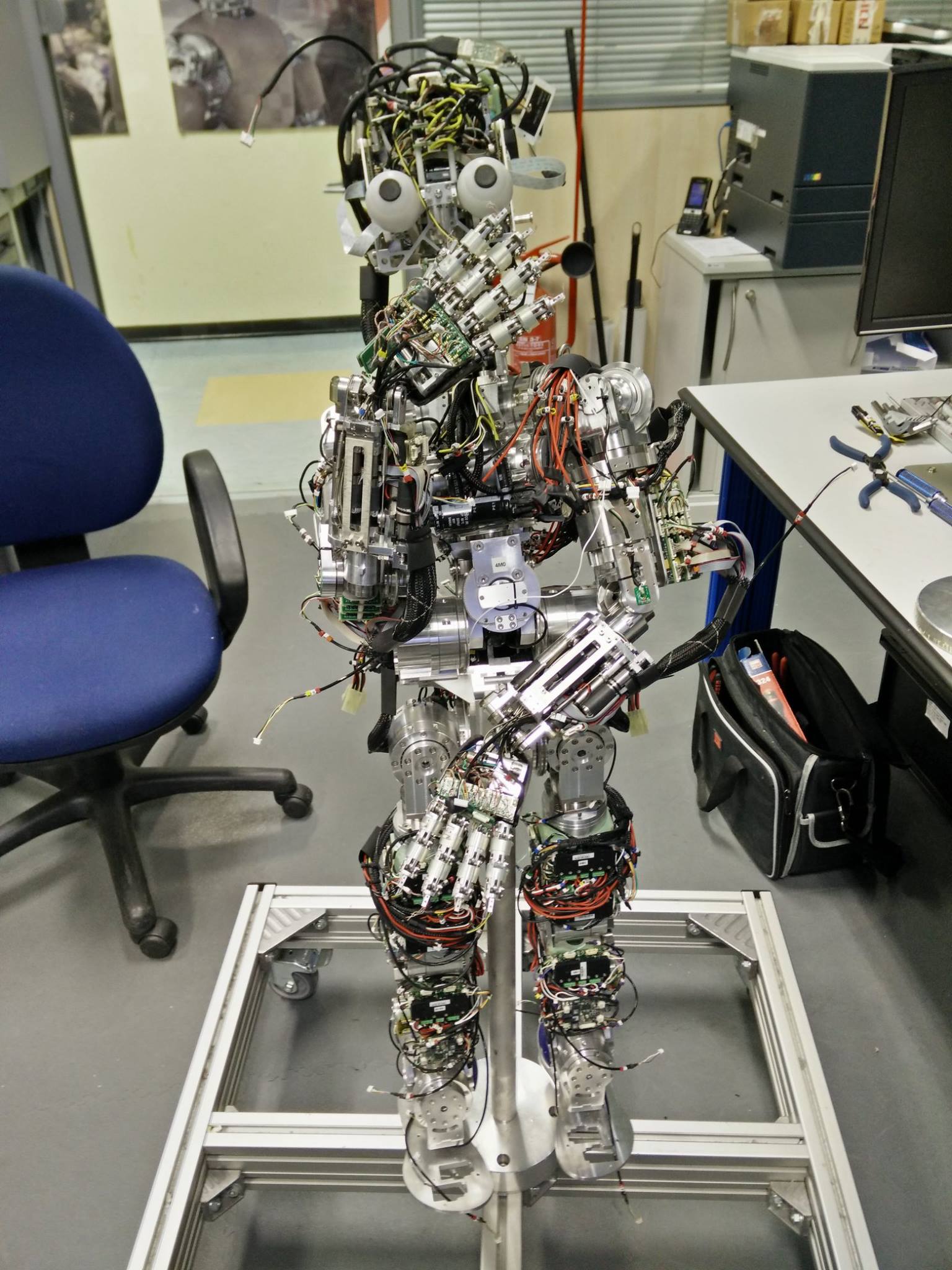
Robot: Sweaty
Photo by: Heitz, Benjamin, University Offenburg
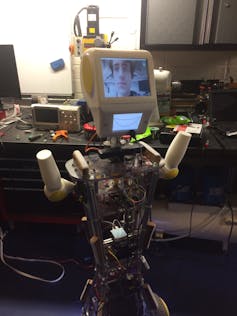
The winner for Best Funny Humanoid was this picture of a frustrated SABIAN entitled “If only I had a self-driving car” by Marco Moscato at the Biorobotics Institute, Scuola Superiore Sant’Anna.

Robot: SABIAN (Sant’Anna BIped humANoid)
Photo by: Marco Moscato, The Biorobotics Institute, Scuola Superiore Sant’Anna
Finalists, in no particular order, were:

Robot: Nao
Photo by: Mohsen Kaboli, Technical University of Munich (TUM).

Robot: iCub
Photo by: Lorenzo Natale, Elisa Maiettini, Vadim Tikhanoff, Istituto Italiano di Tecnologia

Robots: Talos and Nao
Photo by: Aljaž Kramberger, Barry Ridge, Robert Bevec, Miha Deniša, Miha Dežman, Rok Goljat and Andrej Gams, Jožef Stefan Institute.
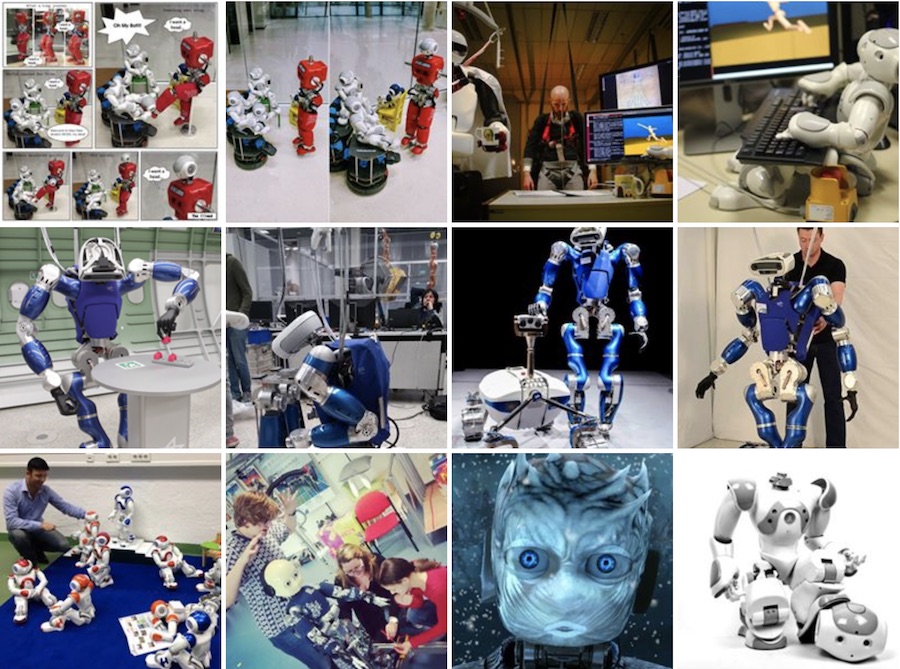
You can see all the other photos below. Congratulations to all the participants, and to the Humanoids 2017 team for the organisation!

Robot: SABIAN (Sant’Anna BIped humANoid)
Photo by: Marco Moscato, The Biorobotics Institute, Scuola Superiore Sant’Anna

Robot: Baxter
Photo by: Alessandro Albini and Simone Denei, DIBRIS (Univiersity of Genoa, Italy)

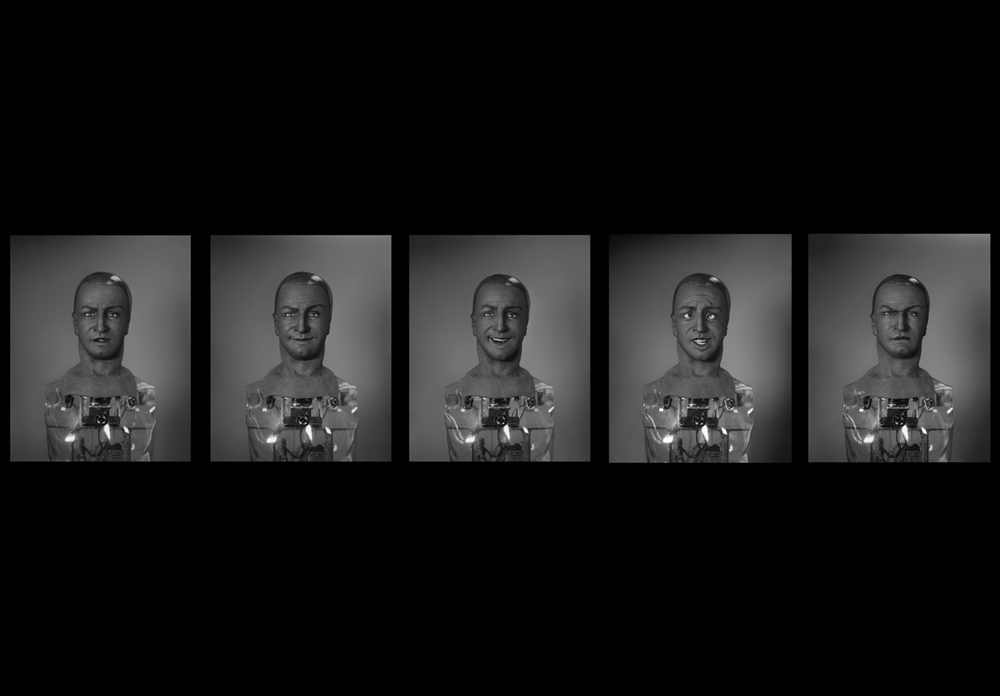
Robot: Valkyrie
Photo by: Nicholas Thoma, NASA

Robot: DYROS JET
Photo by: Jaehoon Sim, Seoul National University, South Korea

Robot: DYROS JET
Photo by: Jaehoon Sim, Seoul National University, South Korea

Robot: DYROS JET
Photo by: Jaehoon Sim, Seoul National University, South Korea

Robot: DYROS RED
Photo by: Mathew Schwartz, Seoul National University

Robot: DYROS JET
Photo by: Jaehoon Sim, Seoul National University, South Korea

Robot: iCub [left], Vizzy [right]
Photo by: João Avelino, VisLab, Institute for Systems and Robotics, Instituto Superior Técnico

Robots: Romeo & HRP2
Photo by: Mehdi Benallegue, CNRS-LAAS, France

Robots: Romeo & HRP2
Photo by: Mehdi Benallegue, CNRS-LAAS, France

Robots: NimbRo-OP2
Photo by: Sven Behnke, University of Bonn

Robot: NimbRo-OP2
Photo by: Sven Behnke, University of Bonn

Robot: NimbRo-OP2
Photo by: Sven Behnke, University of Bonn

Robot: NimbRo-OP2
Photo by: Aimee Han, ROBOTIS.

Robot: iCub
Photo by: Daniele Pucci, Istituto Italiano di Tecnologia

Robot: iCub
Photo by: Daniele Pucci, Istituto Italiano di Tecnologia
Robot: iCub
Photo by: Daniele Pucci, Istituto Italiano di Tecnologia

Robot: Talos
Photo by: Carlos Viva, PAL Robotics

Robot: Talos
Photo by: PAL Robotics

Robot: Nao
Photo by: Mathew Schwartz, New Jersey Institute of Technology

robot: iCub, the Night King
Photo by: Marco Randazzo, Istituto Italiano di Tecnologia (IIT), Genova, Italy.

Robot: iCub
Photo by: Brice Clement, INRIA Nancy, France

Robot: Toro
Photo by: Maximo A. Roa, Christian Ott, Johannes Englsberger, Bernd Henze, Alexander Werner, Oliver Porges, DLR – German Aerospace Center

Robot: Toro
Photo by: Maximo A. Roa, Christian Ott, Johannes Englsberger, Bernd Henze, Alexander Werner, Oliver Porges, DLR – German Aerospace Center

Robot: Toro
Photo by: Maximo A. Roa, Christian Ott, Johannes Englsberger, Bernd Henze, Alexander Werner, Oliver Porges, DLR – German Aerospace Center.

Robot: Nao
Photo by: Aljaž Kramberger, Barry Ridge, Robert Bevec, Miha Deniša, Miha Dežman, Rok Goljat and Andrej Gams, Jožef Stefan Institute.

Robots: Nao and HeiCub
Photo by: Yue Hu, Optimization, Robotics and Biomechanics (ORB), ZITI, Heidelberg University

Robots: Nao and HeiCub
Photo by: Yue Hu, Optimization, Robotics and Biomechanics (ORB), ZITI, Heidelberg University.

Robots: Pepper, iCub, Nao
Photo by: Wibke Borngesser, Institute for Cognitive Systems, TU München.

Robot: Sweaty
Photo by: Sandra Lutz-Vogt, Univ. Appl. Sci. Offenburg




 There’s a scare-tactic video going around on social media, and I wanted to weigh in on it—this particular video has gone from 500,000 views to almost 2 million in the past 10 days. As a matter of principle, I will not link to it. It presents a scary future in which killer robotic drones—controlled by any terrorist organization or government—run rampant.
There’s a scare-tactic video going around on social media, and I wanted to weigh in on it—this particular video has gone from 500,000 views to almost 2 million in the past 10 days. As a matter of principle, I will not link to it. It presents a scary future in which killer robotic drones—controlled by any terrorist organization or government—run rampant.
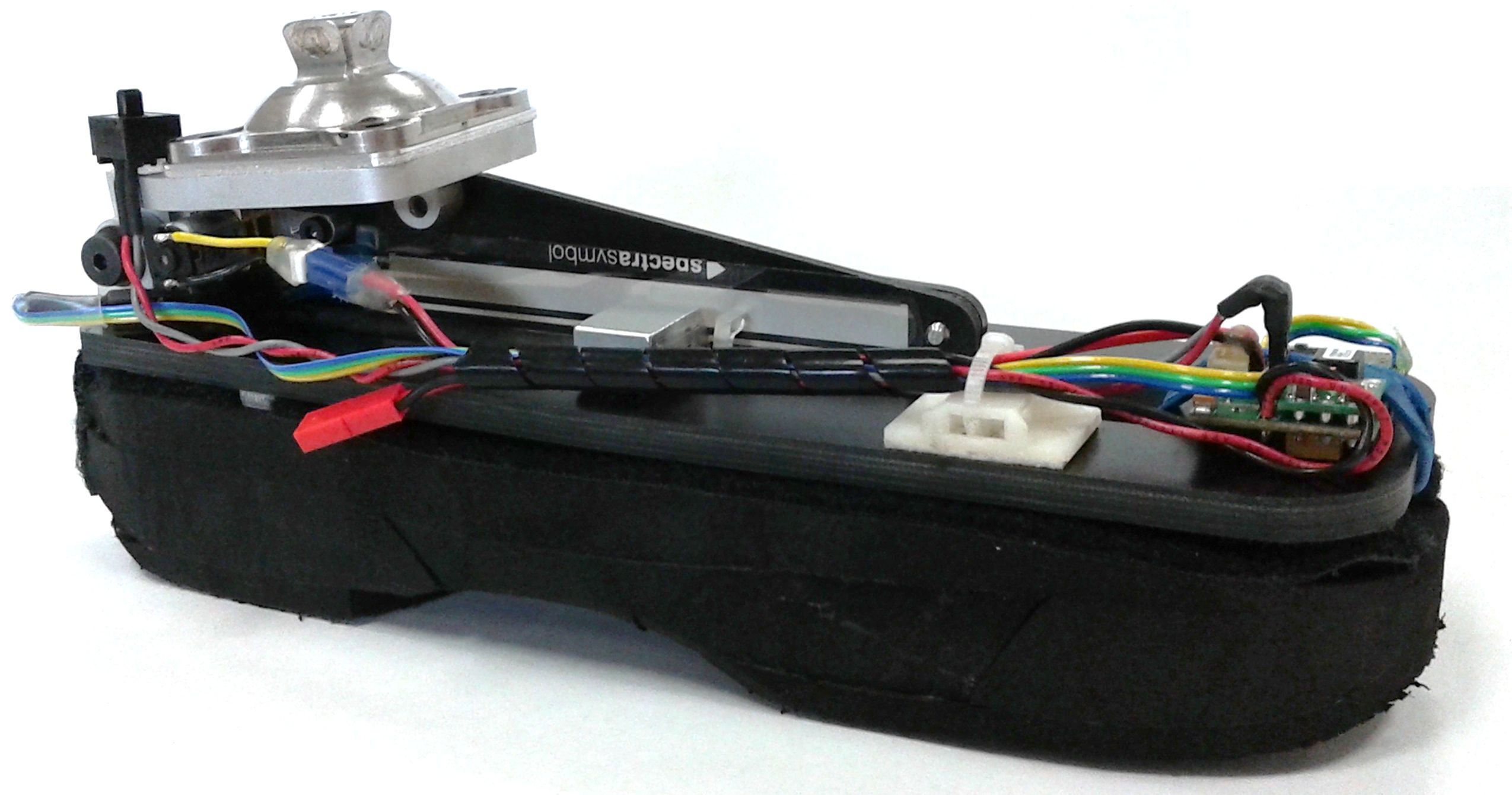
 Peter Adamczyk directs the UW Biomechatronics, Assistive Devices, Gait Engineering and Rehabilitation Laboratory (UW BADGER Lab) which aims to enhance physical and functional recovery from orthopedic and neurological injury through advanced robotic devices. We study the mechanisms by which these injuries impair normal motion and coordination, and target interventions to encourage recovery and/or provide biomechanical assistance. Our work primarily addresses impairments affecting walking, running, and standing. One core focus is advanced semi-active foot prostheses for patients with lower limb amputation. Additional research addresses assessment and rehabilitation of balance impairments, hemiparesis, and other neurologically-based mobility challenges.
Peter Adamczyk directs the UW Biomechatronics, Assistive Devices, Gait Engineering and Rehabilitation Laboratory (UW BADGER Lab) which aims to enhance physical and functional recovery from orthopedic and neurological injury through advanced robotic devices. We study the mechanisms by which these injuries impair normal motion and coordination, and target interventions to encourage recovery and/or provide biomechanical assistance. Our work primarily addresses impairments affecting walking, running, and standing. One core focus is advanced semi-active foot prostheses for patients with lower limb amputation. Additional research addresses assessment and rehabilitation of balance impairments, hemiparesis, and other neurologically-based mobility challenges. We hope you’re enjoying the
We hope you’re enjoying the 





 Boston Dynamics is not the only quadruped provider; recent upstarts have entered the market by utilizing Raibert’s research as an inspiration for their own bionic creatures. Chinese roboticist Xing Wang is unabashed in his gushing admiration for the founder of Boston Dynamics, “Marc Raibert … is my idol,” he said a recent interview with IEEE Spectrum Magazine. However, his veneration for Raibert has not stopped him from founding a competitive startup.
Boston Dynamics is not the only quadruped provider; recent upstarts have entered the market by utilizing Raibert’s research as an inspiration for their own bionic creatures. Chinese roboticist Xing Wang is unabashed in his gushing admiration for the founder of Boston Dynamics, “Marc Raibert … is my idol,” he said a recent interview with IEEE Spectrum Magazine. However, his veneration for Raibert has not stopped him from founding a competitive startup.