ISO 15066 is the emerging standard for collaborative robotics and covers all aspects of robot safety. The ISO15066 definition of a collaborative workspace is the operating space where the robot system and a human can perform tasks concurrently.
Harmonic Drive is well-known for our zero-backlash strain wave gear products. Many machine designers and builders don’t realize that we also manufacture Planetary gears. Booth #LS6068
Packaging Professionals Address Innovation Stage Topics set for PACK EXPO Las Vegas. By: Sean Riley, senior director, media and industry communications, PMMI, The Association for Packaging and Processing Technologies
In this episode, Ron Vanderkley interviews Mark Pivac, Chief Technical Officer and co-founder of FBR (formerly Fastbrick Robotics) about the world’s first end-to-end autonomous bricklaying robot, ‘Hadrian X’. Three years after his first interview, we catch up with Pivac to see how FBR has expanded its operation and chat about their latest commercial prototype, ‘Hadrian X’, as well as the future of the robotic construction industry.
Mark Pivac is the primary inventor of FBR’s automated bricklaying technology. He is an aeronautical and mechanical engineer with over 25 years’ experience working on the development of high technology equipment ranging from lightweight aircraft to heavy off-road equipment. He has 20 years’ experience working with pro/engineer 3D CAD software as well as high-level mathematics, including matrix mathematics, robot transformations and vector mathematics for machine motion. Mark has also worked extensively with design, commissioning and fault finding on servo controlled motion systems achieving very high dynamic performance.
OLYMPUS DIGITAL CAMERA
The city of Milton Keynes hosts from the 17th to the 21st of September the European Robotics League – Smart Cities Robotics Challenge (SciRoc Challenge). For the first time, international researchers in robotics and artificial intelligence meet in a shopping mall to demonstrate the state of the art in robotics within the context of smart cities and specifically smart shopping.
The European Robotics League, funded by the European Commission to advance research, development and innovation in robotics and artificial intelligence, is the umbrella for three robotics competitions: ERL Consumer, ERL Emergency and ERL Professional service robots. All three leagues meet every two years in the ERL Smart Cities Robotics Challenge, showcasing how real robots can make our lives better in urban environments.
The Challenge
The SciRoc challenge will be held in the smart shopping mall of the Centre:MK. The challenge focuses on smart shopping and is divided into a series of episodes, each consisting of a task to be performed addressing specific research challenges. In order to accomplish their tasks, robots will have to cooperate with the simulated digital infrastructure of a smart shopping mall. Although the competing robots will face mock scenarios, the environment and difficulties are intended to be as realistic as possible, including the interaction with people from the public.
The episodes are organised into three categories:
Human-Robot Interaction (HRI) and Mobility, focuses on robots able to show social behaviour tasks such as verbal interaction with humans.
Manipulation, focuses on robots able to achieve manipulation tasks.
Emergency, defines tasks addressed autonomously by small aerial robots
The SciRoc consortium has designed the episodes with the collaboration of external experts from research and industry in the different categories.
The five episodes that are part of the Smart Cities Robotics challenge, and have been chosen by the robotics community from a previous list of fourteen are:
Deliver coffee shop orders (E03)
In this episode the robot will assist customers in a coffee shop by taking orders and bringing objects to and from customers’ tables.
The main functionality evaluated in this episode is people perception. Additional side functionalities are navigation, speech synthesis and recognition.
Team SocRob and their robot MOnarCH getting ready to serve coffees. Photo Credits: European Robotics League
Take the elevator(E04)
The robot must take the elevator crowded with customers to reach a service located in another floor.
The robot should interact with the MK:DataHub to discover which floor it must reach to accomplish its task. The robot must be able to take the elevator together with regular customers of the shopping mall.
Shopping pick and pack (E07)
The robot is in one the booths of the mall. On the shelf of the booth are the goods displayed for sale to the customers.
The customers can place orders through a tablet. The robot must move behind the display and collect the requested packages for the customer, place them in a box, and place the box on a tray where the customer can pick it up.
Open the door (E10)
Doors are ubiquitous in human environments. There are many types of doors, some of which are easier to operate than others for a robot.
In this episode the robot will identify a door, approach it and open it completely within a specified tolerance from 90°.
Fast delivery of emergency pills (E12)
The aerial robot must attend an emergency situation in which a first-aid kit needs to be delivered to a customer.
The robot must be able to fly autonomously to the customer location as fast as possible.
Teams can participate in one or more episodes depending on to their research interests.
The teams
A total of 10 teams from 5 different countries classified to compete in the first edition of the ERL Smart Cities Robotics Challenge.
The teams participating in the SciRoc Challenge 2019 are:
1. SocRob@Home – The Soccer Robots or Society of Robots (SocRob) team is a long-term research project of the Instituto Superior Tecnico, Portugal. Funded in 1998, the team has a broad experience participating in robotics competitions such as RoboCup Soccer, RoboCup@Home, RocKin@Homeand and ERL Consumer Robots. The team has special interest in the topic of HRI and mobility and will participate in Episode 3 – Deliver coffee shop orders.
2. Robotics Lab UC3 – This multidisciplinary research group from the Universidad Carlos III de Madrid, Spain, has previously participated in the ERL Consumer Robots league with one of the TIAGO platforms sponsored by PAL Robotics. The team will demonstrate their robot abilities to interact with humans in the Episode 4 – Take the elevator.
3. Gentlebots – Gentlebots is a team of researchers in robotics from the Rey Juan Carlos University and the University of León, Spain. Their research focus is on software development that allows robots to exhibit intelligent behaviours and they have competed in RoboCup@Home. They will participate in Episode 3 and Episode 4.
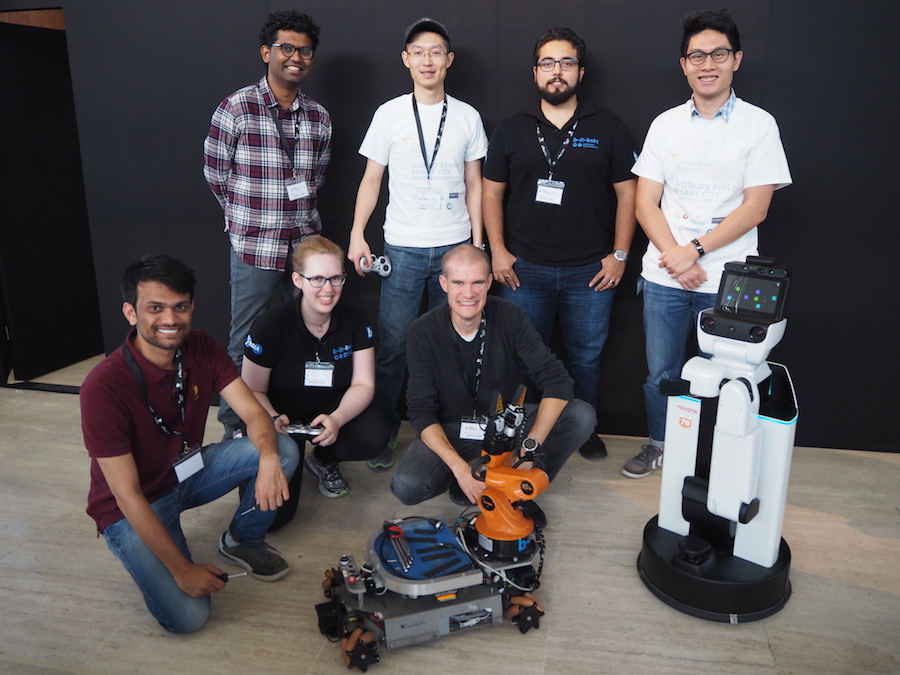
4. b-it-bots – The team from the Hochschule Bonn-Rhein-Sieg, Germany, has a broad experience with industrial and domestic robots in RoboCup@Work and RoboCup@Home. Winners of the ERL Professional Robots Season 2018-2019, they will participate in Episode 7 – Shopping pick and pack and Episode 10- Open the door, both episodes involve manipulation tasks.
Team b-it-bots. Photo Credits: European Robotics League
“You learn a lot of things at University, but not always how to apply them in real life. Robotics competitions are the best place for students to use their knowledge in real scenarios and learn from mistakes. In this competition we are solving problems which do not have a solution yet, so the students cannot download a tutorial or watch a YouTube video, they need create their own engineered solutions. This is learning by doing, not learning by listening” says Deebul Nair, b-it-bots Team Manager.
5. Leeds Autonomous Service Robots – The team of the newly established AI group of the University of Leeds, UK, studies long-term decision making and adaptation. They will demonstrate how it is applied in robotics by participating in Episodes 3, 4 and 10.
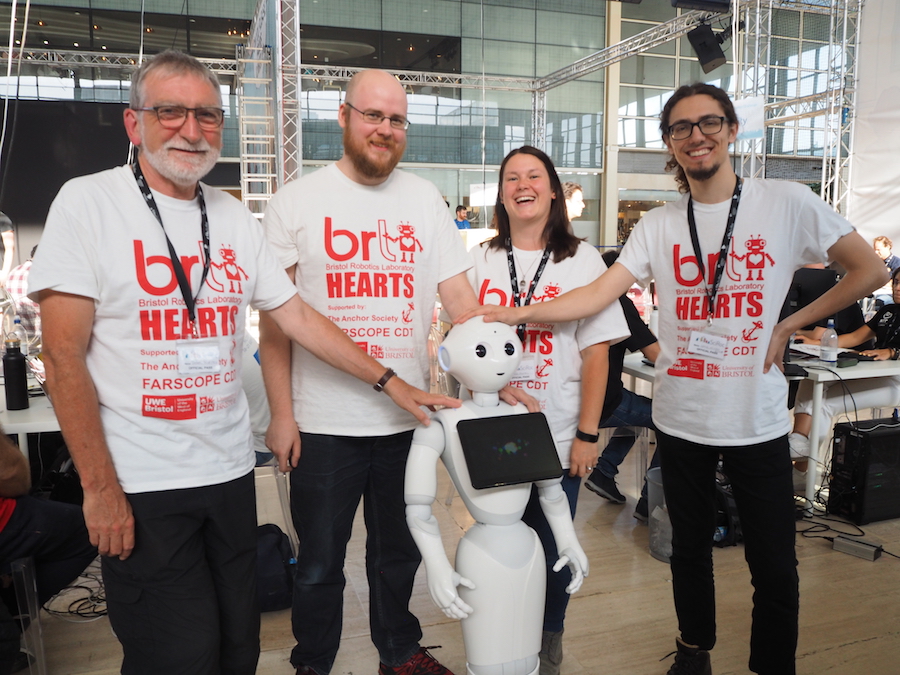
6. HEARTS – The Healthcare Engineering and Assistive Robotics Technology and Services (HEARTS) team is based in the Bristol Robotics Laboratory, a collaboration between the University of the West of England (UWE) and the University of Bristol, UK. The team was formed to provide an opportunity for students to get hands-on experience of developing assistive robots that are robust and reliable to assist people in a range of situations. The HEARTS will participate in Episode 4 – Take the elevator.
“Participating in the SciRoc challenge gives me the opportunity to use a social robot platform like Pepper in applications different from the ones of my PhD. Pepper is designed for interaction with humans, so it is a good platform for the episode of the elevator in which we are competing” explains Beth Mackey, PhD student and member of the HEART team.
Team HEARTS. Photo Credits: European Robotics League
7. UWE Aero – This aerial team of the University of the West of England, UK, is made up of a group of students interested in aerospace projects, focusing in Unmanned aerial vehicles (UAVs). Their backgrounds in aerospace engineering, 3D printing and computer science are a perfect combination to participate in Episode 12 – Fast delivery of emergency pills.
8. CATIE Robotics – The technology transfer center CATIE, France, created in early 2018 this robotics team with the aim of exploring service robotics. CATIE robotics was created in early 2018, and has participated at RoboCup@Home. The team aims to explore service robotics from an application-driven perspective.
“Competitions bring together people from different technical backgrounds under a common goal. They give visibility and the opportunity to be part of a community of experts. Robotics competitions are always very motivating” says Remi Fabre, Team Leader of CATIE robotics.
Team CATIE robotics setting up their robot. Photo Credits: European Robotics League
They will apply their knowledge in control and grasping in Episode 7 – Shopping pick and pack.
9. eNTiTy – Everbots – eNTiTy is the team of the R&D department of NTT Disruption, Spain. The team focuses on developing social robotics applications for clients. They first participated in the ERL Consumer tournament in IROS 2018 conference in Madrid.
“Participating in robotics competitions such as the SciRoc challenge help us advance the state of the art in social robotics and put together a good team of researchers. It gives us the opportunity to test different algorithms, such as vision modules, that we can then apply to other products” says Julian Caro Linares, robotics engineer of NTT Disruption.
They will participate with a PAL Robotics TIAGO robot in Episode 3 – Deliver coffee shop orders and Episode 4 – Take the elevator.
Irene Diaz-Portales, computer vision researcher adds “we chose TiAGo because it’s an excellent robotics platform for developing ROS modules.”
Team eNTiTy testing TIAGO robot. Photo Credits: European Robotics League
10. TeamBathDrones Research – The TeamBathDrones Research is the University of Bath, UK, competitive autonomous aircraft team. The team is formed of a mixture of lecturers, PhD and undergraduate students from the engineering faculty. Through entering in the ERL Smart cities challenge in the emergency category, they aim to demonstrate the application of collision avoidance by in-flight risk minimisation in Episode 12 – Fast delivery of emergency pills.
Which teams will successfully address the SciRoc Challenge Episodes? Don’t miss the updates starting this week.
Three-quarters of total robot sales are currently attributed to just five countries — China, the Republic of Korea, Japan, the United States and Germany.
Whether you’re looking to maximize shelf impact, create a more e-commerce friendly package, increase sustainability, functionality or achieve other product differentiations, you’ll find the packaging solutions you want at PACK Expo.
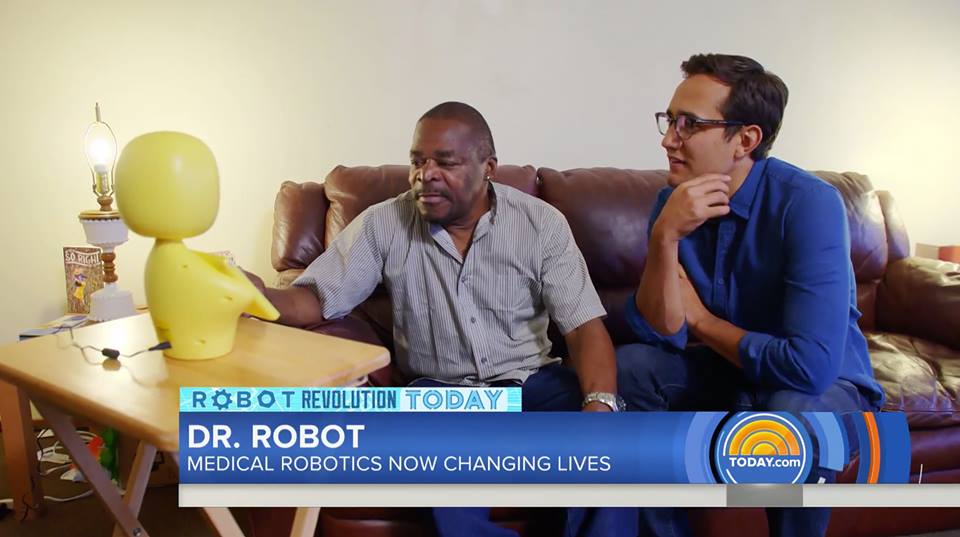
New robot platform improves patient experience using AI to help patients navigate barriers and health care challenges
SAN FRANCISCO, Sept. 12, 2019 /PRNewswire/ — Catalia Health and Pfizer today announced they have launched a pilot program to explore patient behaviors outside of clinical environments and to test the impact regular engagement with artificial intelligence (AI) has on patients’ treatment journeys. The 12-month pilot uses the Mabu® Wellness Coach, a robot that uses artificial intelligence to gather insights into symptom management and medication adherence trends in select patients.
The Mabu robot can interact with patients using AI algorithms to engage in tailored, voice-based conversations. Mabu “talks” with patients about how they are feeling and helps answer questions they may have about their treatment. The Mabu Care Insights Platform then delivers detailed data and insights to clinicians at a specialty pharmacy provider to help human caregivers initiate timely and appropriate outreach to the patient. The goal is to help better manage symptoms and address patient questions in real-time.
“At Catalia Health we’ve seen firsthand the benefits that AI has brought to healthcare for both the patient and the healthcare systems,” said Cory Kidd, founder and CEO of Catalia Health. “Our work with Pfizer allows us to engage with patients on a larger scale and therefore gain access to more insights and data that we hope can improve health outcomes.”
Mabu is helping to deliver personalized care by gaining insights that allow the specialty pharmacy to reach out to patients as they express challenges in managing their conditions. Mabu also generates health tips and reminders to help patients get additional information about their condition and treatment that may help them along the way. Over time, it is our goal that Mabu can help patients navigate barriers and health care challenges that are often a part of managing a chronic disease.
“The healthcare system is overburdened, and as a result, patients often seek more-coordinated care and information. Through this collaboration with Catalia Health, we hope to learn through real-time data and insights about challenges patients face, outside the clinical setting, with the goal to improve their treatment journeys in the future,” said Lidia Fonseca, Chief Digital and Technology Officer at Pfizer. “This pilot is an example of how we are working to develop digital companions for all our medicines to better support patients in their treatment journeys.”
The pilot program was officially announced on stage at the National Association of Specialty Pharmacy’s Annual Meeting & Expo on September 10, 2019. Initial pilot data will be available in the coming months. For more information, visit www.cataliahealth.com
About Catalia Health
Catalia Health is a San Francisco-based patient care management company founded by Cory Kidd, Ph.D., in 2014. Catalia Health provides an effective and scalable solution for individuals managing chronic disease or taking medications on an ongoing basis. The company’s AI-powered robot, Mabu, enables healthcare providers and pharmaceutical companies to better support patients living with chronic illness. Mabu uses a voice-based interface designed for simple, intuitive use by a wide variety of patients in remote care environments. The cloud-based platform delivers unique conversations to patients each time they have a conversation with Mabu.
Catalia Health’s care management programs are tailored to increase clinically appropriate medication adherence, improve symptom management and reduce the likelihood that a patient is readmitted to the hospital after being discharged.
Various technologies are available on the market for bringing an automated guided vehicle (AGV) to its destination. Let us first of all say: many roads lead to Rome. There is no right way and no wrong way.
The food & beverage industry will provide attractive growth potential to the market. The Automated Guided Vehicles (AGVs) or Automated mobile Robots (AMR) are highly suitable for materials shifting operations in the food manufacturing companies.
Jellyfish are about 95% water, making them some of the most diaphanous, delicate animals on the planet. But the remaining 5% of them have yielded important scientific discoveries, like green fluorescent protein (GFP) that is now used extensively by scientists to study gene expression, and life-cycle reversal that could hold the keys to combating aging. Jellyfish may very well harbor other, potentially life-changing secrets, but the difficulty of collecting them has severely limited the study of such “forgotten fauna.” The sampling tools available to marine biologists on remotely operated vehicles (ROVs) were largely developed for the marine oil and gas industries, and are much better-suited to grasping and manipulating rocks and heavy equipment than jellies, often shredding them to pieces in attempts to capture them.
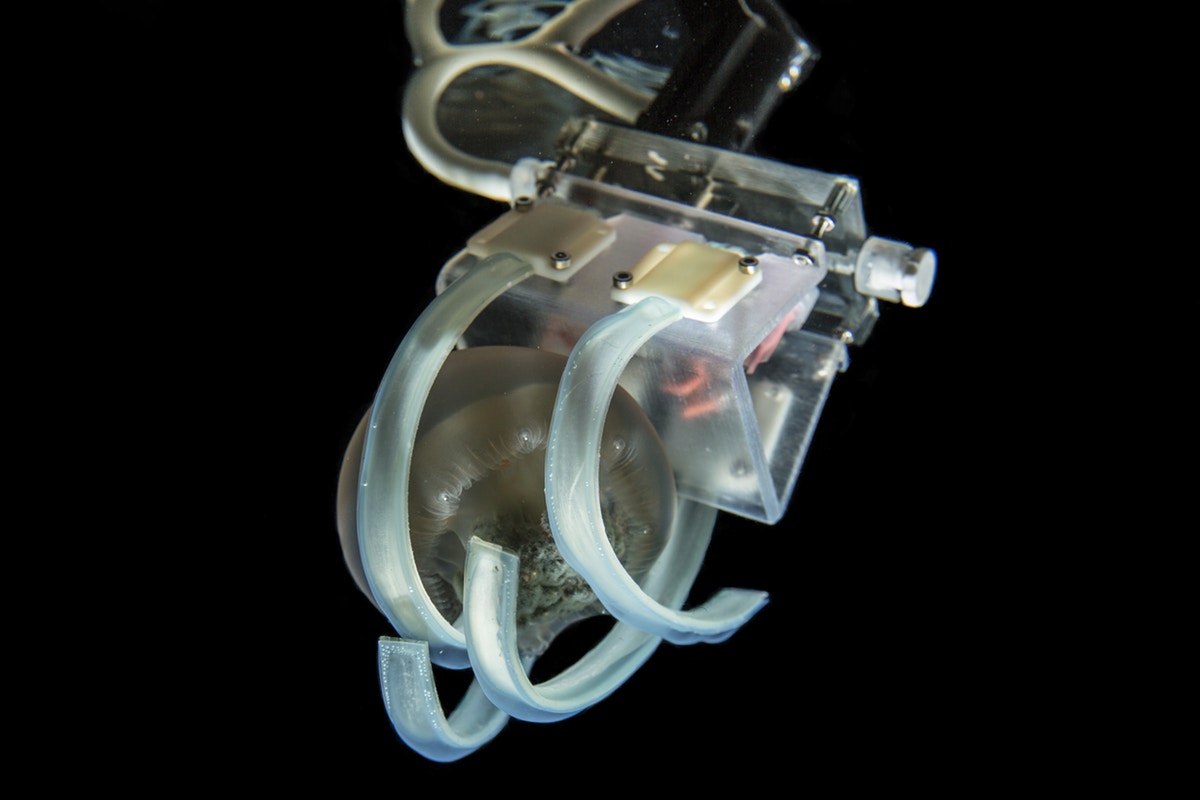
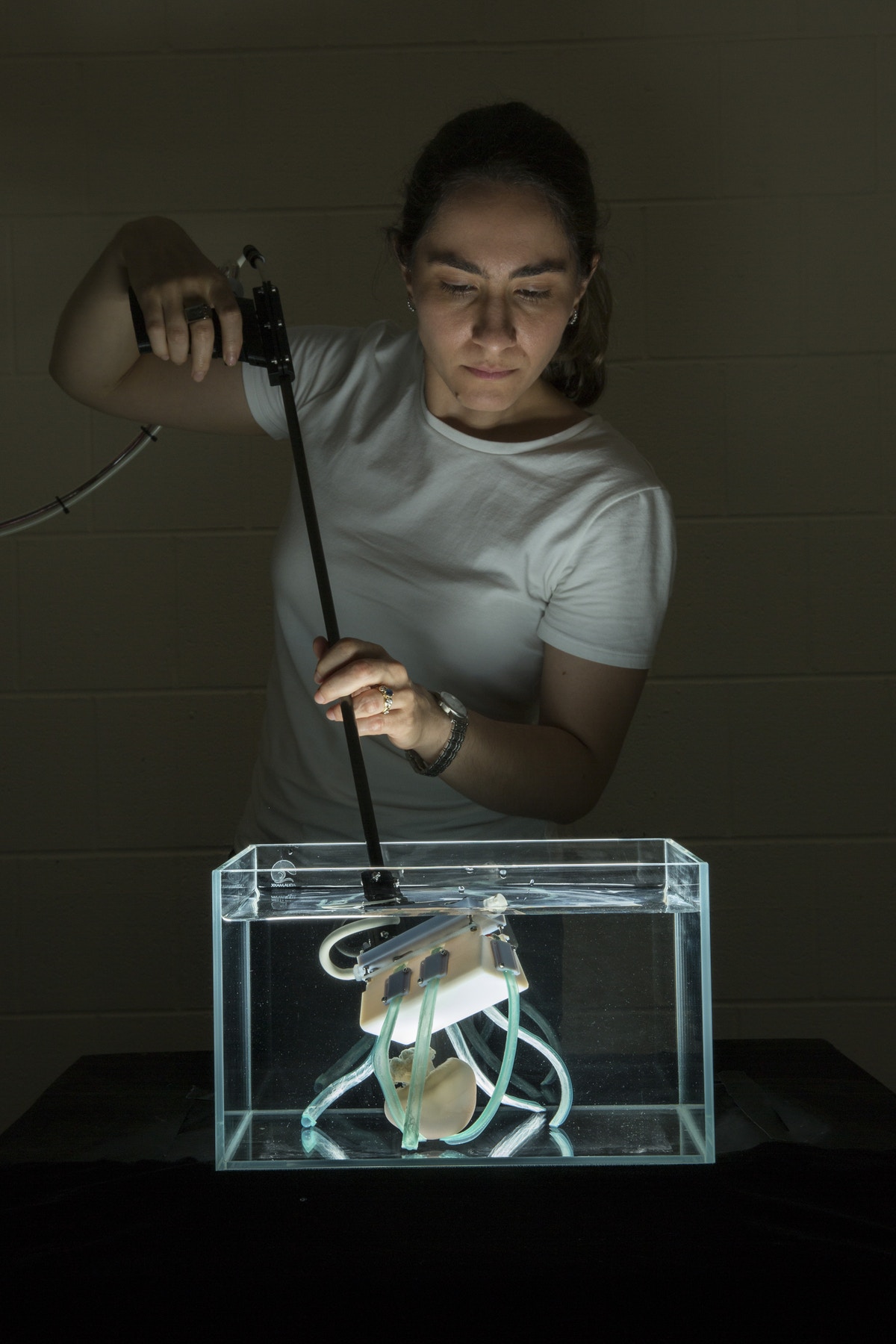
A new ultra-soft gripper developed at the Wyss Institute and Baruch College uses fettuccini-like silicone “fingers” inflated with water to gently but firmly grasp jellyfish and release them without harm, allowing scientists to safely interact with these delicate creatures in their own habitats. Credit: Anand Varma
Now, a new technology developed by researchers at Harvard’s Wyss Institute for Biologically Inspired Engineering, John A. Paulson School of Engineering and Applied Sciences (SEAS), and Baruch College at CUNY offers a novel solution to that problem in the form of an ultra-soft, underwater gripper that uses hydraulic pressure to gently but firmly wrap its fettuccini-like fingers around a single jellyfish, then release it without causing harm. The gripper is described in a new paper published in Science Robotics.
“Our ultra-gentle gripper is a clear improvement over existing deep-sea sampling devices for jellies and other soft-bodied creatures that are otherwise nearly impossible to collect intact,” said first author Nina Sinatra, Ph.D., a former graduate student in the lab of Robert Wood at the Wyss Institute. “This technology can also be extended to improve underwater analysis techniques and allow extensive study of the ecological and genetic features of marine organisms without taking them out of the water.”
The gripper’s six “fingers” are composed of thin, flat strips of silicone with a hollow channel inside bonded to a layer of flexible but stiffer polymer nanofibers. The fingers are attached to a rectangular, 3D-printed plastic “palm” and, when their channels are filled with water, curl in the direction of the nanofiber-coated side. The fingers each exert an extremely low amount of pressure – about 0.0455 kPA, or less than one-tenth of the pressure of a human’s eyelid on their eye. By contrast, current state-of-the-art soft marine grippers, which are used to capture delicate but more robust animals than jellyfish, exert about 1 kPA.
First author Nina Sinatra, Ph.D. tests the ultra-soft gripper on a jellyfish at the New England Aquarium. Credit: Anand Varma
The researchers fitted their ultra-gentle gripper to a specially created hand-held device and tested its ability to grasp an artificial silicone jellyfish in a tank of water to determine the positioning and precision required to collect a sample successfully, as well as the optimum angle and speed at which to capture a jellyfish. They then moved on to the real thing at the New England Aquarium, where they used the grippers to grab swimming moon jellies, jelly blubbers, and spotted jellies, all about the size of a golf ball.
The gripper was successfully able to trap each jellyfish against the palm of the device, and the jellyfish were unable to break free from the fingers’ grasp until the gripper was depressurized. The jellyfish showed no signs of stress or other adverse effects after being released, and the fingers were able to open and close roughly 100 times before showing signs of wear and tear.
“Marine biologists have been waiting a long time for a tool that replicates the gentleness of human hands in interacting with delicate animals like jellyfish from inaccessible environments,” said co-author David Gruber, Ph.D., who is a Professor of Biology and Environmental Science at Baruch College, CUNY and a National Geographic Explorer. “This gripper is part of an ever-growing soft robotic toolbox that promises to make underwater species collection easier and safer, which would greatly improve the pace and quality of research on animals that have been under-studied for hundreds of years, giving us a more complete picture of the complex ecosystems that make up our oceans.”
The ultra-soft gripper is the latest innovation in the use of soft robotics for underwater sampling, an ongoing collaboration between Gruber and Wyss Founding Core Faculty member Robert Wood, Ph.D. that has produced the origami-inspired RAD sampler and multi-functional “squishy fingers” to collect a diverse array of hard-to-capture organisms, including squids, octopuses, sponges, sea whips, corals, and more.
“Soft robotics is an ideal solution to long-standing problems like this one across a wide variety of fields, because it combines the programmability and robustness of traditional robots with unprecedented gentleness thanks to the flexible materials used,” said Wood, who is the co-lead of the Wyss Institute’s Bioinspired Soft Robotics Platform, the Charles River Professor of Engineering and Applied Sciences at SEAS, and a National Geographic Explorer.
“At the Wyss Institute we are always asking, ‘How can we make this better?’ I am extremely impressed by the ingenuity and out-of-the-box thinking that Rob Wood and his team have applied to solve a real-world problem that exists in the open ocean, rather than in the laboratory. This could help to greatly advance ocean science,” said Wyss Institute Founding Director Donald Ingber, M.D., Ph.D., who is also the Judah Folkman Professor of Vascular Biology at Harvard Medical School, the Vascular Biology Program at Boston Children’s Hospital, and Professor of Bioengineering at SEAS.
A new ultra-soft gripper developed at the Wyss Institute uses fettuccini-like silicone “fingers” inflated with water to gently but firmly grasp jellyfish and release them without harm, allowing scientists to safely interact with these delicate creatures in their own habitats. Credit: Wyss Institute at Harvard
The team is continuing to refine the ultra-soft gripper’s design, and aims to conduct studies that evaluate the jellyfishes’ physiological response to being held by the gripper, to more definitively prove that they do not cause the animals stress. Wood and Gruber are also co-Principal Investigators of the Schmidt Ocean Institute’s “Designing the Future” project, and will be further testing their various underwater robots on an upcoming expedition aboard the research ship Falkor in 2020.
Additional authors of the paper are Clark Teeple, Daniel Vogt, M.S., and Kevin Kit Parker, Ph.D. from the Wyss Institute and Harvard SEAS. Parker is a Founding Core Faculty member of the Wyss Institute and the Tarr Family Professor of Bioengineering and Applied Physics at SEAS. The research was supported by the National Science Foundation, The Harvard University Materials Research Science and Engineering Center, The National Academies Keck Futures Initiative, and the National Geographic Society.
InSystems and Model Engineering Solutions jointly developed a Simulink model of an adaptive fleet of InSystems’ proANT collaborating transport robots. The goal was to capture the desired adaptive system behavior to more effectively deal with the typical goals and challenges of collaborative embedded system groups (CSGs). A fleet of robots has to react to dynamic changes in the policy of the manufacturing execution system or the number and nature of its members to safeguard its functionality. The consistent application of a model-based development process for automation systems offers a variety of benefits to deal with these challenges. First and foremost, the specification of the CSG in the form of executable models allows for a fully virtual simulated representation of the robot fleet. This provides a sound foundation to efficiently develop and maintain the actual system. To exploit the full potential, a model-based approach relies on the reusability of models and test beds throughout the different development phases. Secondly, the model-based development process profits from a fully integrated tool chain that highly automatizes associated development activities. These include requirements management, modelling, and simulation as well as integrated quality assurance tasks, most notably, model-based static analysis and requirements-based testing. Tools such as the MES Model Examiner® and the MES Test Manager® are beneficial in streamlining the process.
Abbildung 1: Figure 2: Fleet of proANT AGVs at Bierbaum Unternehmensgruppe, transporting open barrels. Image Source: Model Engineering Solutions – GmbH www.model-engineers.com