What is the best simulation tool for robotics? This is a hard question to answer because many people (or their companies) specialize in one tool or another. Some simulators are better at one aspect of robotics than at others. When I’m asked to recommend the best simulation tool for robotics I have to find an expert and hope that they are current and across a wide range of simulation tools in order to give me the best advice, which was why I took particular note of the recent review paper from Australia’s CSIRO, “A Review of Physics Simulators for Robotics Applications” by Jack Collins, Shelvin Chand, Anthony Vanderkop, and David Howard, published in IEEE Access (Volume: 9).
“We have compiled a broad review of physics simulators for use within the major fields of robotics research. More specifically, we navigate through key sub-domains and discuss the features, benefits, applications and use-cases of the different simulators categorised by the respective research communities. Our review provides an extensive index of the leading physics simulators applicable to robotics researchers and aims to assist them in choosing the best simulator for their use case.”
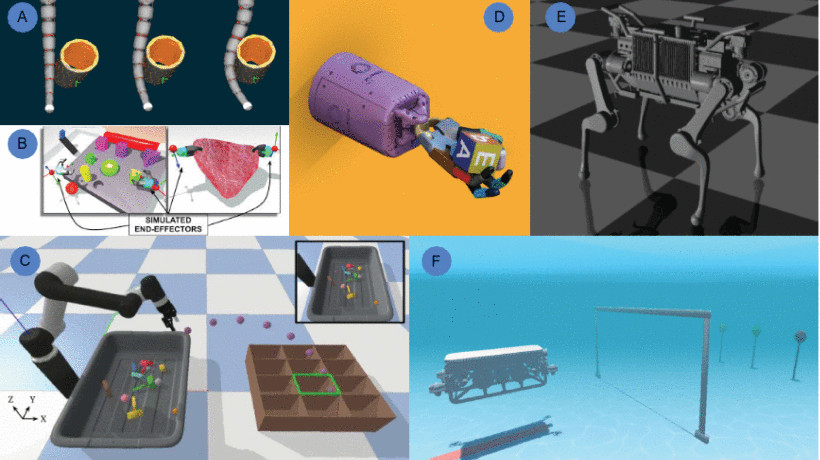
Simulation underpins robotics because it’s cheaper, faster and more robust than real robots. While there are some guides that benchmark simulators against real world tasks there isn’t a comprehensive review. A more thorough review can address gaps and needs in research and research challenges for simulation. The authors focus on seven sub-domains: Mobile Ground Robotics; Manipulation; Medical Robotics; Marine Robotics; Aerial Robotics; Soft Robotics and Learning for Robotics.
I’m going to cut to the chase and provide a copy of the final comparison tables of each sub-domain but for anyone interested in utilizing these recommendations, then I recommend reading the rationale behind the rankings in the full review article. The authors also consider whether or not a simulator is actively supported. Handy to know! And the paper is also an excellent source of information about various historic and current robotics competitions.
Mobile Ground Robotics:
TABLE 1 Feature Comparison Between Popular Robotics Simulators

TABLE 2 Feature Comparison Between Popular Robotics Simulators Used for Mobile Ground Robotics
Manipulation:

TABLE 3 Feature Comparison for Popular Robotics Simulators Used for Manipulation
Medical Robotics:

TABLE 4 Feature Comparison of Popular Robotics Simulators Used for Medical Robotics
Marine Robotics:

TABLE 5 Feature Comparison of Popular Simulators Used for Marine Robotics
Aerial Robotics:

TABLE 6 Feature Comparison of Popular Simulators Used for Aerial Robotics
Soft Robotics:

TABLE 7 Feature Comparison of Popular Simulators Used for Soft Robotics
Learning for Robotics:

TABLE 8 Feature Comparison of Popular Simulators Used in Learning for Robotics
Conclusions:
As robotics makes more use of deep learning, simulators that can deal with data on the fly become necessary, and also a potential solution for simulation problems regarding points of contact or collisions. Rather than utilize multiple simulation methods to make a clearer abstraction of the real world in these boundary situations, the answer may be to insert neural networks trained to replicate the properties of difficult phenomena into the simulator. There is further discussion on differentiable simulation, levels of abstraction and the expansion of libraries, plug-ins, toolsets, benchmarking and algorithmic integration, all increasing both the utility and complexity of simulation for robotics.
As the field of simulation for robotics grows, so does the need for metrics that capture the accuracy of the real world representation. “Finally, we predict that we will see further research into estimating and modeling uncertainty of simulators.”
This may have been the first review article on simulation for robotics but hopefully not the last. There’s a clear need to study and measure the field. I found the sections on soft robotics and learning for robotics particularly interesting, as the paper discussed the difficulties of simulation in these fields. And please attribute any errors in this summary to my mistakes. Read the full review here: https://ieeexplore.ieee.org/document/9386154