
In this episode, Audrow Nash interviews Juxi Leitner, a Postdoctoral Research Fellow at QUT; and Nicholas Panitz, Ben Wilson, and James Brett, from CSIRO.
Leitner speaks about the Amazon Picking challenge, a challenge to advance the state of robotic grasping, and their robot which won the challenge in 2017. Their robot is similar to a cartesian 3D printer in form and uses either a suction cup or a pinch gripper for grabbing objects. Their robot has a depth camera and uses a digital scale to determine if an object has been picked up successfully. Leitner discusses what their team did differently from other teams that helped them win the competition.
Panitz, Wilson, and Brett speak about their hexapod robots. Their hexapods are for several purposes, such as environmental monitoring and remote inspection. They choose to use hexapods because they are statically stable. They discuss the design of their hexapods and how research works at Commonwealth Scientific and Industrial Research Organization, or CSIRO.
Links

 Jonathan W. Hurst is Chief Technology Officer and co-founder of Agility Robotics, as well as an Associate Professor of Robotics and College of Engineering Dean’s Professor at Oregon State University. He holds a B.S. in mechanical engineering and an M.S. and Ph.D. in robotics, all from Carnegie Mellon University. His university research focuses on understanding the fundamental science and engineering best practices for legged locomotion. Investigations range from numerical studies and analysis of animal data, to simulation studies of theoretical models, to designing, constructing, and experimenting with legged robots for walking and running. Agility Robotics is taking this research to commercial applications for robotic legged mobility, working towards a day when robots can go where people go, generate greater productivity across the economy, and improve quality of life for all.
Jonathan W. Hurst is Chief Technology Officer and co-founder of Agility Robotics, as well as an Associate Professor of Robotics and College of Engineering Dean’s Professor at Oregon State University. He holds a B.S. in mechanical engineering and an M.S. and Ph.D. in robotics, all from Carnegie Mellon University. His university research focuses on understanding the fundamental science and engineering best practices for legged locomotion. Investigations range from numerical studies and analysis of animal data, to simulation studies of theoretical models, to designing, constructing, and experimenting with legged robots for walking and running. Agility Robotics is taking this research to commercial applications for robotic legged mobility, working towards a day when robots can go where people go, generate greater productivity across the economy, and improve quality of life for all.




 Andrea Bajcsy is a Ph.D. student in Electrical Engineering and Computer Sciences at the University of California Berkeley. She received her B.S. degree in Computer Science at the University of Maryland and was awarded the NSF Graduate Research Fellowship in 2016. At Berkeley, she works in the Interactive Autonomy and Collaborative Technologies Laboratory researching physical human-robot interaction.
Andrea Bajcsy is a Ph.D. student in Electrical Engineering and Computer Sciences at the University of California Berkeley. She received her B.S. degree in Computer Science at the University of Maryland and was awarded the NSF Graduate Research Fellowship in 2016. At Berkeley, she works in the Interactive Autonomy and Collaborative Technologies Laboratory researching physical human-robot interaction.

 Maja Matarić is professor and Chan Soon-Shiong chair in Computer Science Department, Neuroscience Program, and the Department of Pediatrics at the University of Southern California, founding director of the USC Robotics and Autonomous Systems Center (RASC), co-director of the USC Robotics Research Lab and Vice Dean for Research in the USC Viterbi School of Engineering. She received her PhD in Computer Science and Artificial Intelligence from MIT, MS in Computer Science from MIT, and BS in Computer Science from the University of Kansas.
Maja Matarić is professor and Chan Soon-Shiong chair in Computer Science Department, Neuroscience Program, and the Department of Pediatrics at the University of Southern California, founding director of the USC Robotics and Autonomous Systems Center (RASC), co-director of the USC Robotics Research Lab and Vice Dean for Research in the USC Viterbi School of Engineering. She received her PhD in Computer Science and Artificial Intelligence from MIT, MS in Computer Science from MIT, and BS in Computer Science from the University of Kansas. 
 Monica Daley earned an HBSc in Biology with a Chemistry minor at the University of Utah, where she was inspired to pursue an academic career through her research on human locomotor-ventilatory integration with
Monica Daley earned an HBSc in Biology with a Chemistry minor at the University of Utah, where she was inspired to pursue an academic career through her research on human locomotor-ventilatory integration with 



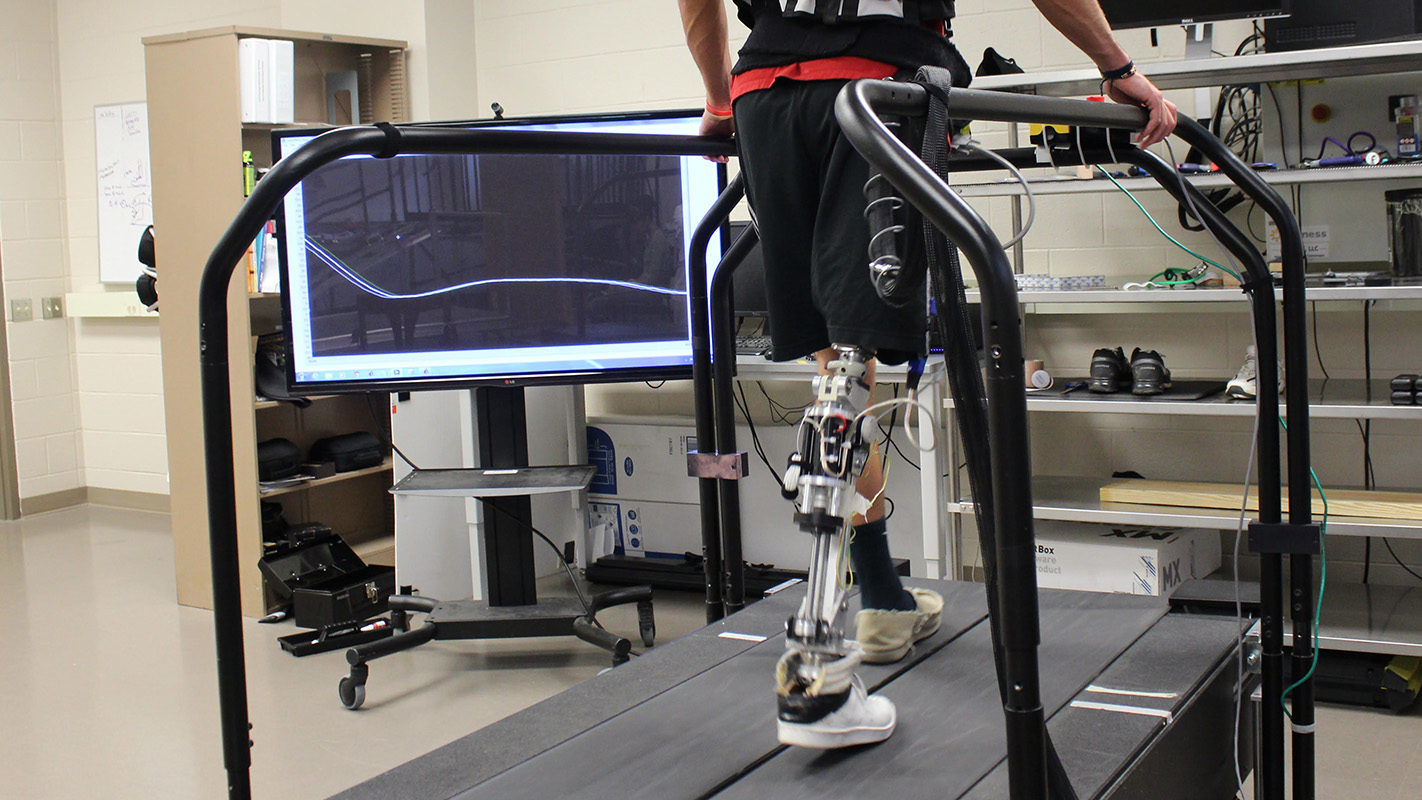


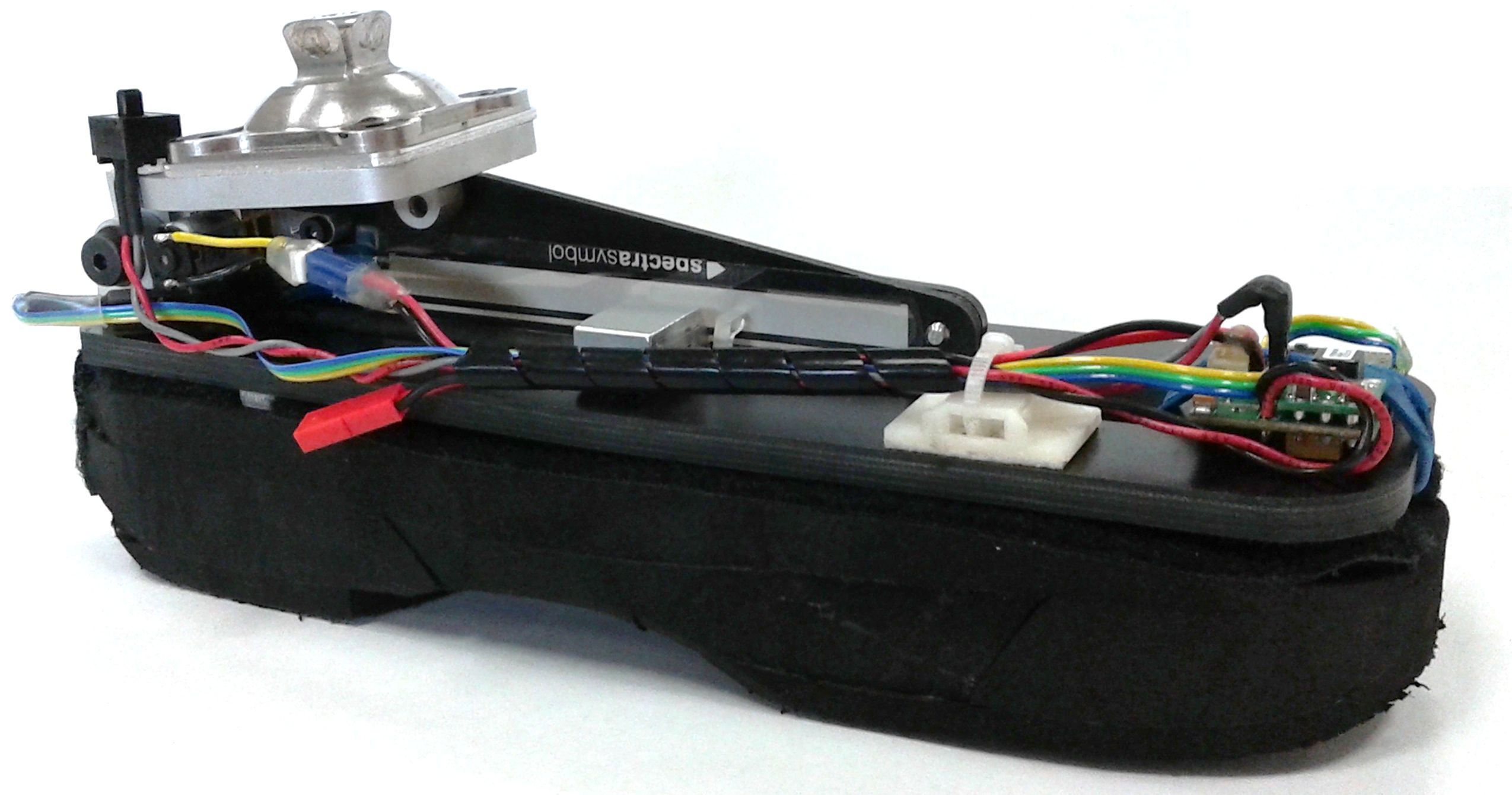
 Peter Adamczyk directs the UW Biomechatronics, Assistive Devices, Gait Engineering and Rehabilitation Laboratory (UW BADGER Lab) which aims to enhance physical and functional recovery from orthopedic and neurological injury through advanced robotic devices. We study the mechanisms by which these injuries impair normal motion and coordination, and target interventions to encourage recovery and/or provide biomechanical assistance. Our work primarily addresses impairments affecting walking, running, and standing. One core focus is advanced semi-active foot prostheses for patients with lower limb amputation. Additional research addresses assessment and rehabilitation of balance impairments, hemiparesis, and other neurologically-based mobility challenges.
Peter Adamczyk directs the UW Biomechatronics, Assistive Devices, Gait Engineering and Rehabilitation Laboratory (UW BADGER Lab) which aims to enhance physical and functional recovery from orthopedic and neurological injury through advanced robotic devices. We study the mechanisms by which these injuries impair normal motion and coordination, and target interventions to encourage recovery and/or provide biomechanical assistance. Our work primarily addresses impairments affecting walking, running, and standing. One core focus is advanced semi-active foot prostheses for patients with lower limb amputation. Additional research addresses assessment and rehabilitation of balance impairments, hemiparesis, and other neurologically-based mobility challenges.
 Marco Hutter is assistant professor for Robotic Systems at ETH Zürich since 2015 and Branco Weiss Fellow since 2014. Before this, he was deputy director and group leader in the field of legged robotics at the Autonomous Systems Lab at ETH Zürich. After studying mechanical engineering, he conducted his doctoral degree in robotics at ETH with focus on design, actuation, and control of dynamic legged robotic systems. Beside his commitment within the National Centre of Competence in Research (NCCR) Digital Fabrication since October 2015 Hutter is part of the NCCR robotics and coordinator of several research projects, industrial collaborations, and international competitions (e.g. ARGOS challenge) that target the application of high-mobile autonomous vehicles in challenging environments such as for search and rescue, industrial inspection, or construction operation. His research interests lie in the development of novel machines and actuation concepts together with the underlying control, planning, and optimization algorithms for locomotion and manipulation.
Marco Hutter is assistant professor for Robotic Systems at ETH Zürich since 2015 and Branco Weiss Fellow since 2014. Before this, he was deputy director and group leader in the field of legged robotics at the Autonomous Systems Lab at ETH Zürich. After studying mechanical engineering, he conducted his doctoral degree in robotics at ETH with focus on design, actuation, and control of dynamic legged robotic systems. Beside his commitment within the National Centre of Competence in Research (NCCR) Digital Fabrication since October 2015 Hutter is part of the NCCR robotics and coordinator of several research projects, industrial collaborations, and international competitions (e.g. ARGOS challenge) that target the application of high-mobile autonomous vehicles in challenging environments such as for search and rescue, industrial inspection, or construction operation. His research interests lie in the development of novel machines and actuation concepts together with the underlying control, planning, and optimization algorithms for locomotion and manipulation.