Prof. Nikolaus Correll – Robots Getting a Grip on General Manipulation
Bio: Nikolaus Correll is an Associate Professor at the University of Colorado at Boulder. He obtained his MS in Electrical Engineering from ETH Zürich and his PhD in Computer Science from EPF Lausanne in 2007. From 2007-2009 he was a post-doc at MIT’s Computer Science and Artificial Intelligence Lab (CSAIL). Nikolaus is the recipient of a NSF CAREER award, a NASA Early Career Faculty Fellowship and a Provost Faculty achievement award. In 2016, he founded Robotic Materials Inc. to commercialize robotic manipulation technology.
Prof. Cynthia Breazeal – Living with Social Robots: from Research to Commercialization and Back
Abstract: Social robots are designed to interact with people in an interpersonal way, engaging and supporting collaborative social and emotive behavior for beneficial outcomes. We develop adaptive algorithmic capabilities and deploy multitudes of cloud-connected robots in schools, homes, and other living facilities to support long-term interpersonal engagement and personalization of specific interventions. We examine the impact of the robot’s social embodiment, emotive and relational attributes, and personalization capabilities on sustaining people’s engagement, improving learning, impacting behavior, and shaping attitudes to help people achieve long-term goals. I will also highlight challenges and opportunities in commercializing social robot technologies for impact at scale. In a time where citizens are beginning to live with intelligent machines on a daily basis, we have the opportunity to explore, develop, study, and assess humanistic design principles to support and promote human flourishing at all ages and stages.
Bio: Cynthia Breazeal is a Professor at the MIT Media Lab where she founded and Directs the Personal Robots Group. She is also Associate Director of the Media Lab in charge of new strategic initiatives, and she is spearheading MIT’s K-12 education initiative on AI in collaboration with the Media Lab, Open Learning and the Schwarzman College of Computing. She is recognized as a pioneer in the field of social robotics and human-robot interaction and is a AAAI Fellow. She is a recipient of awards by the National Academy of Engineering as well as the National Design Awards. She has received Technology Review’s TR100/35 Award and the George R. Stibitz Computer & Communications Pioneer Award. She has also been recognized as an award-winning entrepreneur, designer and innovator by CES, Fast Company, Entrepreneur Magazine, Forbes, and Core 77 to name a few. Her robots have been recognized by TIME magazine’s Best Inventions in 2008 and in 2017 where her award-wining Jibo robot was featured on the cover. She received her doctorate from MIT in Electrical Engineering and Computer Science in 2000.
In this fourth release of our series dedicated to IEEE/RSJ IROS 2020 (International Conference on Intelligent Robots and Systems) original series Real Roboticist, we bring you Peter Corke. He is a distinguished professor of robotic vision at Queensland University of Technology, Director of the QUT Centre for Robotics, and Director of the ARC Centre of Excellence for Robotic Vision.
If you’ve ever studied a robotics or computer vision course, you might have read a classic book: Peter Corke’s Robotics, Vision and Control. Moreover, Peter has also released several open-source robotics resources and free courses, all available at his website. If you’d like to hear more about his career in robotics and education, his main challenges and what he learnt from them, and what’s his advice for current robotics students, check out his video below. Have fun!
The IEEE Robotics and Automation Society has recently released the list of winners of their best paper awards. Below you can see the list and access the publications. Congratulations to all winners!
IEEE Transactions on Robotics King-Sun Fu Memorial Best Paper Award
IEEE Robotics and Automation Magazine Best Paper Award
Vine Robots: Design, Teleoperation, and Deployment for Navigation and Exploration. Margaret M. Coad, Laura H. Blumenschein, Sadie Cutler, Javier A. Reyna Zepeda, Nicholas D. Naclerio, Haitham El-Hussieny, Usman Mehmood, Jee-Hwan Ryu, Elliot W. Hawkes, and Allison M. Okamura. IEEE Robotics and Automation Magazine; vol. 27, no. 3, pp. 120-132, September 2020
Prof. Steve LaValle – Rapidly exploring Random Topics
Bio: Steve LaValle is Professor of Computer Science and Engineering, in Particular Robotics and Virtual Reality, at the University of Oulu. From 2001 to 2018, he was a professor in the Department of Computer Science at the University of Illinois. He has also held positions at Stanford University and Iowa State University. His research interests include robotics, virtual and augmented reality, sensing, planning algorithms, computational geometry, and control theory. In research, he is mostly known for his introduction of the Rapidly exploring Random Tree (RRT) algorithm, which is widely used in robotics and other engineering fields. In industry, he was an early founder and chief scientist of Oculus VR, acquired by Facebook in 2014, where he developed patented tracking technology for consumer virtual reality and led a team of perceptual psychologists to provide principled approaches to virtual reality system calibration, health and safety, and the design of comfortable user experiences. From 2016 to 2017 he was Vice President and Chief Scientist of VR/AR/MR at Huawei Technologies, Ltd. He has authored the books Planning Algorithms, Sensing and Filtering, and Virtual Reality.
Prof. Sarah Bergbreiter – Microsystems-inspired Robotics
Bio: Sarah Bergbreiter joined the Department of Mechanical Engineering at Carnegie Mellon University in the fall of 2018 after spending ten years at the University of Maryland, College Park. She received her B.S.E. degree in electrical engineering from Princeton University in 1999. After a short introduction to the challenges of sensor networks at a small startup company, she received the M.S. and Ph.D. degrees from the University of California, Berkeley in 2004 and 2007 with a focus on microrobotics. Prof. Bergbreiter received the DARPA Young Faculty Award in 2008, the NSF CAREER Award in 2011, and the Presidential Early Career Award for Scientists and Engineers (PECASE) Award in 2013 for her research bridging microsystems and robotics. She has received several Best Paper awards at conferences like ICRA, IROS, and Hilton Head Workshop. She currently serves as vice-chair of DARPA’s Microsystems Exploratory Council and as an associate editor for IEEE Transactions on Robotics.
Today we continue with our series on IEEE/RSJ IROS 2020 (International Conference on Intelligent Robots and Systems) original series Real Roboticist. This time you’ll meet Radhika Nagpal, who is a Fred Kavli Professor of Computer Science at the Wyss Institute for Biologically Inspired Engineering from Harvard University.
Did you know Rhadika directed the research that led to the creation of the Kilobots, the first open-source, low-cost robots that were specifically designed for large scale experiments with hundreds and thousands of them? You can watch this example or this other one if you’re curious. If you’d like to know more about Rhadika and her achievements, challenges and what she would tell her younger self, below is the whole interview. Enjoy!
Topical Area: Driverless Vehicles and Field Robots
Bio: Dr. Anna Petrovskaya is a scientist and entrepreneur with decades of experience in the field of AI, autonomy, and 3D computer vision. Most recently, Anna built a 3D mapping startup that was acquired by Mobileye/Intel, where she became Head of LiDAR AI. She completed her Doctorate degree in Computer Science at Stanford University in 2011, where she focused on Artificial Intelligence and Robotics. In 2012, her thesis was named among the winners of the IEEE Intelligent Transportation Systems Society Best PhD Thesis Award. Anna was part of the core team that built the Stanford autonomous car Junior, which was a precursor to the Waymo/Google autonomous car. She has served as an Associate Editor for International Conference on Robotics and Automation (ICRA) since 2011. Based on her expertise, Anna has been invited to co-author chapters for the Handbook of Intelligent Vehicles and the 2nd edition of the Handbook of Robotics
Prof. I-Ming Chen – Automation of Food Handling: From Item-Picking to Food-Picking
Topical Area: Food Handling Robotics
Bio: I-Ming Chen received the B.S. degree from National Taiwan University in 1986, and M.S. and Ph.D. degrees from California Institute of Technology, Pasadena, CA in 1989 and 1994 respectively. He is currently Professor in the School of Mechanical and Aerospace Engineering of Nanyang Technological University (NTU) in Singapore, and Editor-in-chief of IEEE/ASME Transactions on Mechatronics. He is Director of Robotics Research Centre in NTU from 2013 to 2017, and is also a member of the Robotics Task Force 2014 under the National Research Foundation which is responsible for Singapore’s strategic R&D plan in future robotics. Professor Chen is Fellow of Singapore Academy of Engineering, Fellow of IEEE and Fellow of ASME, General Chairman of 2017 IEEE International Conference on Robotics and Automation (ICRA 2017) in Singapore. His research interests are in logistics and construction robots, wearable devices, human-robot interaction and industrial automation. He is also CEO of Transforma Robotics Pte Ltd developing robots for construction industry and CTO of Hand Plus Robotics Pte Ltd developing robotics and AI solutions for logistics and manufacturing industry.
Last Sunday we started another series on IEEE/RSJ IROS 2020 (International Conference on Intelligent Robots and Systems) original series Real Roboticist. In this episode you’ll meet Ruzena Bajczy, Professor Emerita of Electrical Engineering and Computer Science at the University of California, Berkeley. She is also the founding Director of CITRIS (the Center for Information Technology Research in the Interest of Society).
In her talk, she explains her path from being an electrical engineer to becoming a researcher with Emeritus honours, and with over 50 years of experience in robotics, artificial intelligence and the foundations of how humans interact with our environment. Are you curious about the tips she’s got to share and her own prediction of the future of robotics? Don’t miss it out!
Last Wednesday we started this series of posts showcasing the plenary and keynote talks from the IEEE/RSJ IROS2020 (International Conference on Intelligent Robots and Systems). This is a great opportunity to stay up to date with the latest robotics & AI research from top roboticists in the world. This week we’re bringing you Prof. Frank Dellaert (Georgia Institute of Technology; Google AI) and Prof. Ashish Deshpande (The University of Texas).
Prof. Frank Dellaert – Perception in Aerial, Marine & Space Robotics: a Biased Outlook
Bio: Frank Dellaert is a Professor in the School of Interactive Computing at the Georgia Institute of Technology and a Research Scientist at Google AI. While on leave from Georgia Tech in 2016-2018, he served as Technical Project Lead at Facebook’s Building 8 hardware division. Before that he was also Chief Scientist at Skydio, a startup founded by MIT grads to create intuitive interfaces for micro-aerial vehicles. His research is in the overlap between robotics and computer vision, and he is particularly interested in graphical model techniques to solve large-scale problems in mapping, 3D reconstruction, and increasingly model-predictive control. The GTSAM toolbox embodies many of the ideas his research group has worked on in the past few years and is available at https://gtsam.org.
Prof. Ashish Deshpande – Harmony Exoskeleton: A Journey from Robotics Lab to Stroke
Bio: Ashish D. Deshpande is passionate about helping stroke patients recover from their disabilities and he believes robots could serve as important tools in the recovery process. He is a faculty member in Mechanical Engineering at The University of Texas at Austin, where he directs the ReNeu Robotics Lab. His work focuses on the study of human system and design of robotic systems toward the goals accelerating recovery after a neurological injury (e.g. stroke and spinal cord injury), improving the quality of lives of those living disabilities (e.g. amputation) and enhancing lives and productivity of workers, soldiers and astronauts. Specifically, his group has designed two novel exoskeletons for delivering engaging and subject-specific training for neuro-recovery of upper-body movements after stroke and spinal cord injury. Dr. Deshpande is a co-founder of Harmonic Bionics whose mission is to improve rehabilitation outcomes for the stroke patients.
Are you curious about the people behind the robots? The series ‘Real Roboticist’, produced by the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), shows the people at the forefront of robotics research from a more personal perspective. How did they become roboticists? What made them proud and what challenges did they face? What advice would they give to their younger self? What does a typical day look like? And where do they see the future of robotics? In case you missed it during the On-Demand conference, no worries! IEEE has recently made their original series public, and every Sunday we’ll bring you an interview with a real roboticist for you to get inspired.
This week is the turn of Davide Scaramuzza, Professor and Director of the Robotics and Perception Group at the University of Zürich. In his talk, Davide explains his journey from Electronics Engineering to leading a top robotics vision research group developing a promising technology: event cameras. He’ll also speak about the challenges he faced along the way, and even how he combines the robotics research with another of his passions, magic. Curious about where the magic happens? Davide also takes you around his research lab during the interview. Let the magic happen!
Prof. Yukie Nagai – Cognitive Development in Humans and Robots: New Insights into Intelligence
Abstract: Computational modeling of cognitive development has the potential to uncover the underlying mechanism of human intelligence as well as to design intelligent robots. We have been investigating whether a unified theory accounts for cognitive development and what computational framework embodies such a theory. This talk introduces a neuroscientific theory called predictive coding and shows how robots as well as humans acquire cognitive abilities using predictive processing neural networks. A key idea is that the brain works as a predictive machine; that is, the brain tries to minimize prediction errors by updating the internal model and/or by acting on the environment. Our robot experiments demonstrate that the process of minimizing prediction errors leads to continuous development from non-social to social cognitive abilities. Internal models acquired through their own sensorimotor experiences enable robots to interact with others by inferring their internal state. Our experiments inducing atypicality in predictive processing also explains why and how developmental disorders appear in social cognition. I discuss new insights into human and robot intelligence obtained from these studies.
Bio: Yukie Nagai is a Project Professor at the International Research Center for Neurointelligence, the University of Tokyo. She received her Ph.D. in Engineering from Osaka University in 2004 and worked at the National Institute of Information and Communications Technology, Bielefeld University, and Osaka University. Since 2019, she leads Cognitive Developmental Robotics Lab at the University of Tokyo. Her research interests include cognitive developmental robotics, computational neuroscience, and assistive technologies for developmental disorders. Her research achievements have been widely reported in the media as novel techniques to understand and support human development. She also serves as the research director of JST CREST Cognitive Mirroring.
Prof. Danica Kragic – Robotics and Artificial Intelligence Impacts on the Fashion Industry
Abstract: This talk will overview how robotics and artificial intelligence can impact fashion industry. What can we do to make fashion industry more sustainable and what are the most difficult parts in this industry to automate? Concrete examples of research problems in terms of perception, manipulation of deformable materials and planning will be discussed in this context.
Bio: Danica Kragic is a Professor at the School of Computer Science and Communication at the Royal Institute of Technology, KTH. She received MSc in Mechanical Engineering from the Technical University of Rijeka, Croatia in 1995 and PhD in Computer Science from KTH in 2001. She has been a visiting researcher at Columbia University, Johns Hopkins University and INRIA Rennes. She is the Director of the Centre for Autonomous Systems. Danica received the 2007 IEEE Robotics and Automation Society Early Academic Career Award. She is a member of the Royal Swedish Academy of Sciences, Royal Swedish Academy of Engineering Sciences and Young Academy of Sweden. She holds a Honorary Doctorate from the Lappeenranta University of Technology. Her research is in the area of robotics, computer vision and machine learning. She received ERC Starting and Advanced Grant. Her research is supported by the EU, Knut and Alice Wallenberg Foundation, Swedish Foundation for Strategic Research and Swedish Research Council. She is an IEEE Fellow.
The Bristol Robotics Laboratory (BRL) hosted their first virtual conference last Wednesday, the 30th of June. With over 50 talks, the conference was a gathering of top robotics researchers, business leaders and PhD/post-doctoral students showcasing cutting-edge research. In their four dedicated tracks, speakers covered a wide range of topics such as unmanned aerial vehicles, soft robotics, assistive technologies, human-robot interaction, robot safety & ethics, or swarm robotics, among others. Moreover, there were two panels discussing the future of robotics, and smart automation & startups.
In case you missed the conference, or you would like to re-watch it, BRL has made all the talks available through their dedicated YouTube channel. For your comfort, you’ll find all the videos in the playlist below. To see the details of each track or talk, you can access their programme navigator. Speakers’ email addresses are also available for you to contact them directly.
Would you like to go even deeper? You can now discover where the previous research takes place through their virtual walkthrough. Enjoy!
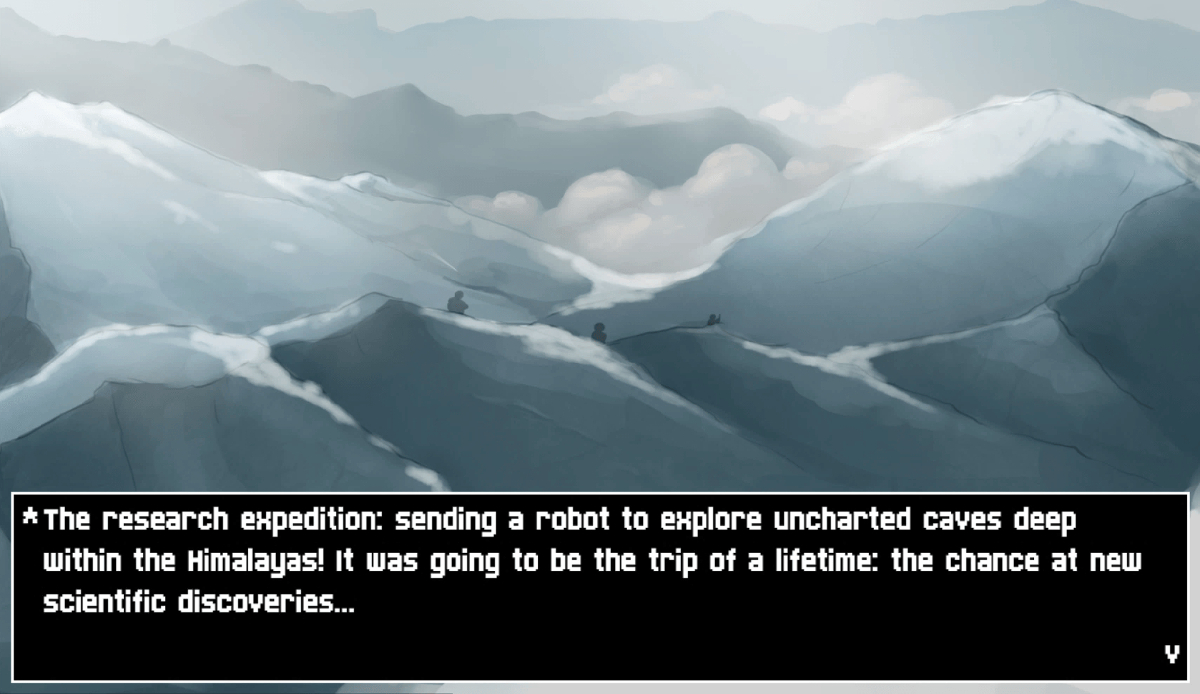
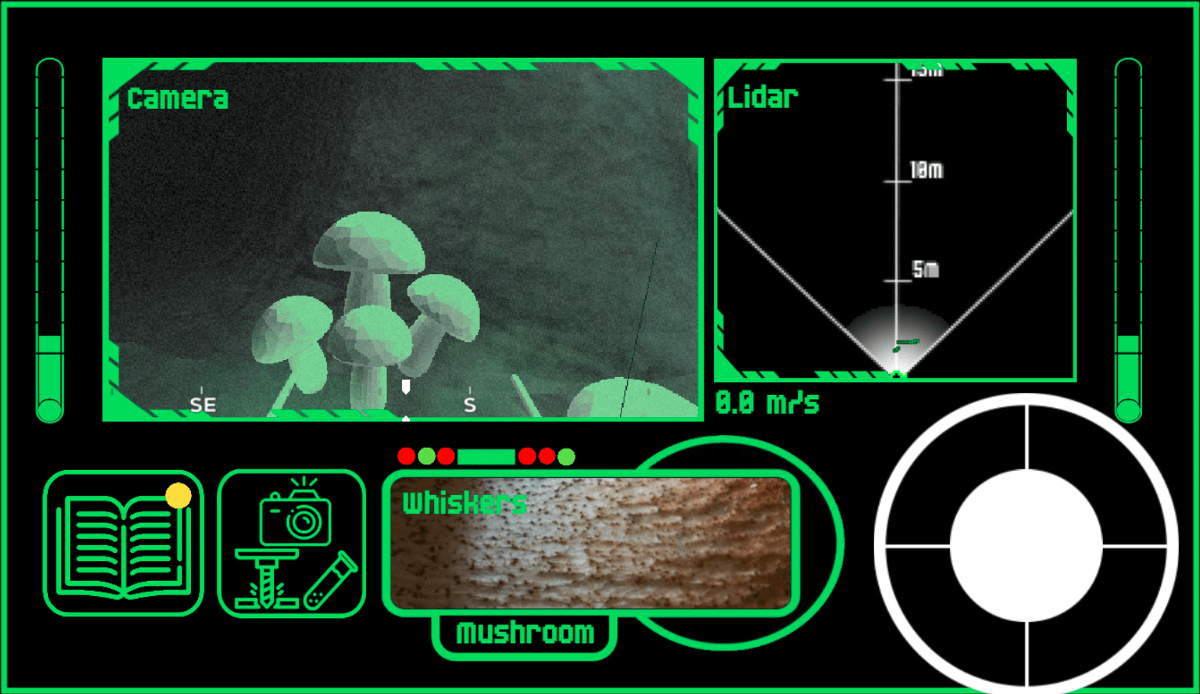
Dive into the experience of piloting a robotic scout through what appears to be an ancient cave system leading down to the centre of the Earth. With the help of advanced sensors, guide your robot explorer along dark tunnels and caverns, avoiding obstacles, collecting relics of aeons past and, hopefully, discover what happened to its predecessor.
Mickey Li, Julian Hird, G. Miles, Valentina Lo Gatto, Alex Smith and WeiJie Wong (most from the FARSCOPE CDT programme of the University of Bristol and the University of the West of England) have created this educational game as part of the UKRAS festival of Robotics 2021. The game has been designed to teach you about how sensors work, how they are used in reality and perhaps give a glimpse into the mind of the robot. With luck, this game can show how exciting it can be to work in robotics.
As the authors suggest, you can check out the DARPA Subterranean Challenge (video)(website) (not affiliated) for an example of the real life version of this game.
The game is hosted on this website. The site is secured and no data is collected when playing the game (apart from if you decide to fill in the anonymous feedback form). The source code for the game is available open source here on Github. Enjoy!
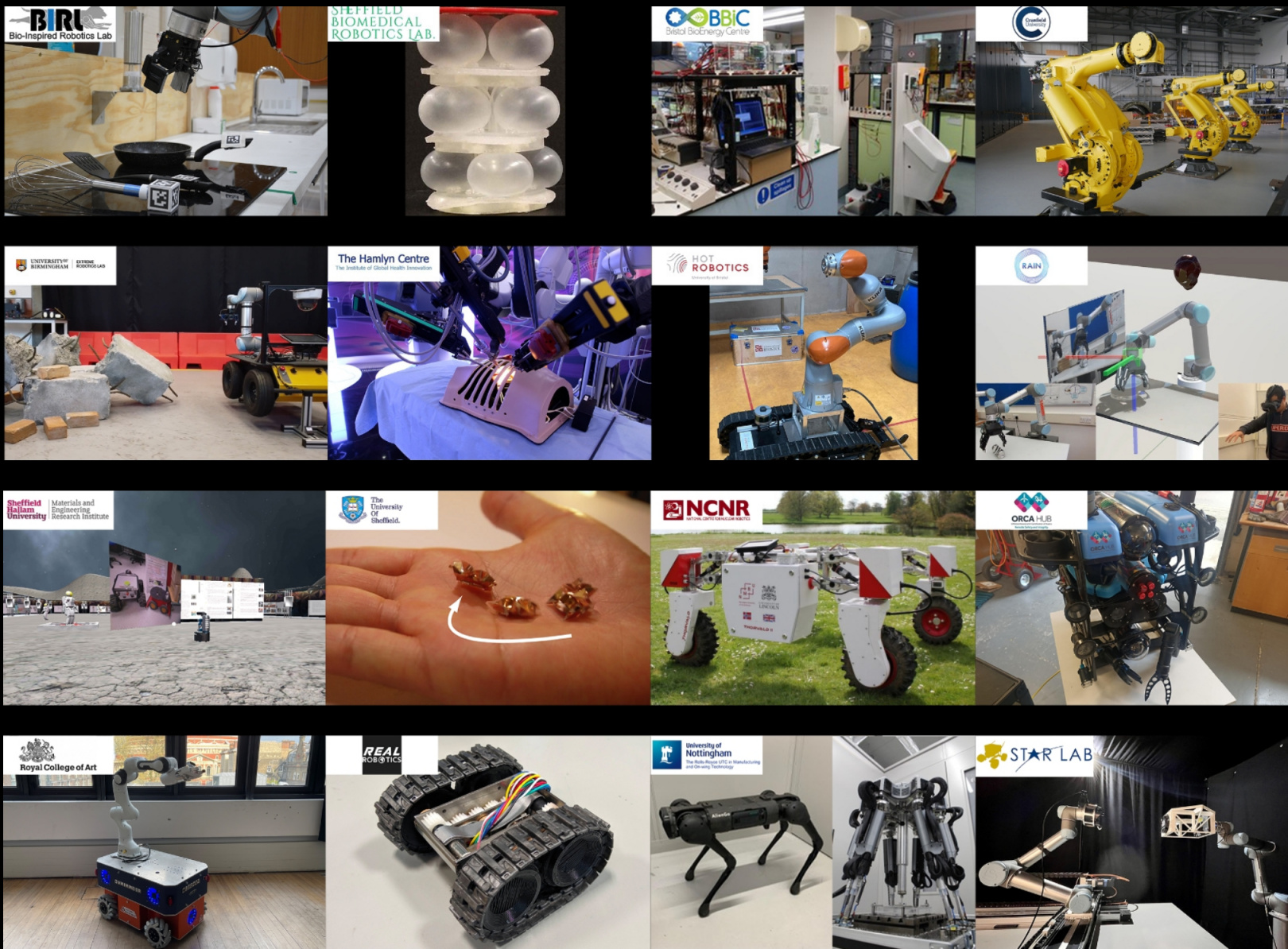
For five years, the EPSRC UK Robotics and Autonomous Systems (UK-RAS) Network have been holding the UK Robotics Week. This year’s edition kicked off on the 19th of June as the UK Festival of Robotics with the aim of boosting public engagement in robotics and intelligent systems. The festival features online events, special competitions, and interactive activities for robot enthusiasts of all ages. Among them, we chose to recommend you the Robot Lab Live session that will take place online on Wednesday the 23rd of June, 4pm – 6pm (BST).
Robot Lab Live is a virtual robotics showcase featuring 16 of the UK’s top robotics research groups. Each team will show-off their cutting-edge robots and autonomous systems simultaneously to live audiences on YouTube. You can flick between different demos running during the two-hour livestream, ask questions and interact with the research teams in the chat. Here’s the link to watch the livestream.
Apart from Robot Lab Live, there are other interactive (and online!) events that we find of particular interest:
Mosaix with Swarm Robot Tiles (Tuesday the 22nd of June, 4pm – 6pm BST): In this event, you will be able to remotely control your own Tile at the Bristol Robotics Laboratory to create collective art with other users. Tiles are small, 4-inch screens-on-wheels that users can draw on, colour, and move. ‘Mosaix’ emerges from the interactions between swarms of robot ‘Tiles’.
Tech Tag (Thursday the 24th of June, 5pm – 7pm BST): Control one of our robots at Harwell campus in Oxford as they play a high-tech version of the schoolyard classic – tag. Visit this website to join one of the four robot teams (blue, purple, red or yellow) and vote for where your robot should go next to avoid being tagged. If you’re it – try to catch one of the other robots as quickly as you can! With live commentary from science communicator and presenter, Sam Langford.
CSI Robot (Friday the 25th of June, 3pm – 4pm BST): Would you like to try being an accident investigator, finding out the cause of incidents involving humans and social robots? Then join us for this fun, interactive session!
To find out about more events, please visit this website.
Siddharth Mayya (University of Pennsylvania), Gennaro Notomista (CNRS Rennes), Roderich Gross (The University of Sheffield) and Vijay Kumar (University of Pennsylvania) were the organisers of this IEEE ICRA 2021 workshop aiming to identify and accelerate developments that help swarm robotics technology transition into the real world. Here we bring you the recordings of the session in case you missed it or would like to re-watch.
As the organisers describe, “in swarm robotics systems, coordinated behaviors emerge via local interactions among the robots as well as between robots and the environment. From Kilobots to Intel Aeros, the last decade has seen a rapid increase in the number of physically instantiated robot swarms. Such deployments can be broadly classified into two categories: in-laboratory swarms designed primarily as research aids, and industry-led efforts, especially in the entertainment and automated warehousing domains. In both of these categories, researchers have accumulated a vast amount of domain-specific knowledge, for example, regarding physical robot design, algorithm and software architecture design, human-swarm interfacing, and the practicalities of deployment.” The workshop brought together swarm roboticists from academia to industry to share their latest developments—from theory to real-world deployment. Enjoy the playlist with all the recordings below!
Did you have the chance to attend the 2021 International Conference on Robotics and Automation (ICRA 2021)? Here we bring you the papers that received an award this year in case you missed them. Congratulations to all the winners and finalists!
Best Paper Award in Automation
Automated Fabrication of the High-Fidelity Cellular Micro-Scaffold through Proportion-Corrective Control of the Photocuring Process.Xin Li, Huaping Wang, Qing Shi, JiaXin Liu, Zhanhua Xin, Xinyi Dong, Qiang Huang and Toshio Fukuda
“An essential and challenging use case solved and evaluated convincingly. This work brings to light the artisanal field that can gain a lot in terms of safety and worker’s health preservation through the use of collaborative robots. Simulation is used to design advanced control architectures, including virtual walls around the cutting-tool as well as adaptive damping that would account for the operator know-how and level of expertise.”
How to Select and Use Tools?: Active Perception of Target Objects Using Multimodal Deep Learning.Namiko Saito, Tetsuya Ogata, Satoshi Funabashi, Hiroki Mori and Shigeki Sugano
“Robots benefit from being able to select and use appropriate tools. This paper contributes to the advancement of robotics by focusing on tool-object-action relations. The proposed deep neural network model generates motions for tool selection and use. Results demonstrated for a relatively complex ingredient handling task have broader applications in robotics. The approach that relies on active perception and multimodal information fusion is an impactful contribution to cognitive robotics.”
Reactive Human-To-Robot Handovers of Arbitrary Objects.Wei Yang, Chris Paxton, Arsalan Mousavian, Yu-Wei Chao, Maya Cakmak and Dieter Fox
“This paper presents a method combining realtime motion planning and grasp selection for object handover task from a human to a robot, with effective evaluation on a user study on 26 diverse household objects. The incremental contribution has been made for human robot interaction. Be great if the cost function of best grasp selection somehow involves robotic manipulation metric, eg., form closure.”
Soft Hybrid Aerial Vehicle Via Bistable Mechanism.Xuan Li, Jessica McWilliams, Minchen Li, Cynthia Sung and Chenfanfu Jiang
“This paper presents a novel morphing hybrid aerial vehicle with folding wings that exhibits both a quadrotor and a fixed wing modewithout requiring any extra actuation by leveraging the motion of a bistable mechanism at the center of the aircraft. A topology optimization method is developed to optimize the bistable mechanism and the folding wing. This work is an important contribution to design of hybrid aerial vehicles.”
Relational Graph Learning on Visual and Kinematics Embeddings for Accurate Gesture Recognition in Robotic Surgery.Yonghao Long, Jie Ying Wu, Bo Lu, Yueming Jin, Mathias Unberath, Yunhui Liu, Pheng Ann Heng and Qi Dou
“This paper presents a novel online multi-modal graph learning method to dynamically integrate complementary information in video and kinematics data from robotic systems, to achieve accurate surgical gesture recognition. The proposed method is validated on collected in-house dVRK datasets, shedding light on the general efficacy of their approach.”
Optimal Sequential Stochastic Deployment of Multiple Passenger Robots.Chris (Yu Hsuan) Lee, Graeme Best and Geoffrey Hollinger
“The paper presents rigorous results (well validated experimentally) and visionary ideas: the innovative idea of marsupial robots is very promising for the multi-robot systems community.”
StRETcH: A Soft to Resistive Elastic Tactile Hand. Carolyn Matl, Josephine Koe and Ruzena Bajcsy
“The committee was particularly impressed by the high level of novelty in this work with unique applications for tactile manipulation of soft objects. Both the paper and presentation provided a clear description of the problem solved, methods and contribution suitable for the general ICRA audience. Significant experimental validations made for a compelling record of the contribution.”
Interval-Based Visual-LiDAR Sensor Fusion.Raphael Voges and Bernardo Wagner
“The paper proposes to use interval analysis to propagate the error from the input sources to the fused information in a straightforward way. To show the applicability of our approach, the paper uses the fused information for dead reckoning. An evaluation using real data shows that the proposed approach localizes the robot in a guaranteed way.”
Compact Flat Fabric Pneumatic Artificial Muscle (ffPAM) for Soft Wearable Robotic Devices.Woojong Kim, Hyunkyu Park and Jung Kim
“This paper presents design and evaluation of a novel flat fabric pneumatic artificial muscle with embedded sensing. Experimental results clearly demonstrate that the innovative ffPAM is durable, compact, and has great potential to advance broader application of wearable service robots.”
Aerial Manipulator Pushing a Movable Structure Using a DOB-Based Robust Controller.Dongjae Lee, Hoseong Seo, Inkyu Jang,Seung Jae Lee and H. Jin Kim
“This paper provides a robust control approach that maintains UAV stability through manipulator contact forces during pushing. It contributes control design along with convincing experimental validation on manipulated objects of unknown size and dynamics. The approach provides practical utility for unmanned aerial manipulation with contact forces.”
Unsupervised Learning of Lidar Features for Use in a Probabilistic Trajectory Estimator.David Juny Yoon, Haowei Zhang, Mona Gridseth, Hugues Thomas and Timothy Barfoot
“The paper presents an unsupervised parameter learning approach in the context of Gaussian variational inference. The approach is innovative and sound. It has been well evaluated using open benchmark datasets. The paper has a broad impact on autonomous navigation.”
Extrinsic Contact Sensing with Relative-Motion Tracking from Distributed Tactile Measurements.Daolin Ma, Siyuan Dong, Alberto Rodriguez
“The paper makes a notable contribution to the important and re-emerging field of tactile perception by solving the problem of contact localization between an unknown object held by an imprecise grasp and the unknown environment with which it is in contact. This paper represents an excellent theory-to-practice exercise as the novel proposal of using extrinsic tactile array data to infer contact is verified with a new tactile sensor and real robotic manipulation in a simplified, but realistic environment. The authors also provide a robust and honest discussion of results, both positive and negative, for reader evaluation.”