 2025 LASA/CREATE/EPFL CC BY SA.
2025 LASA/CREATE/EPFL CC BY SA.
By Celia Luterbacher
With its opposable thumb, multiple joints and gripping skin, human hands are often considered to be the pinnacle of dexterity, and many robotic hands are designed in their image. But having been shaped by the slow process of evolution, human hands are far from optimized, with the biggest drawbacks including our single, asymmetrical thumbs and attachment to arms with limited mobility.
“We can easily see the limitations of the human hand when attempting to reach objects underneath furniture or behind shelves, or performing simultaneous tasks like holding a bottle while picking up a chip can,” says Aude Billard, head of the Learning Algorithms and Systems Laboratory (LASA) in EPFL’s School of Engineering. “Likewise, accessing objects positioned behind the hand while keeping the grip stable can be extremely challenging, requiring awkward wrist contortions or body repositioning.”
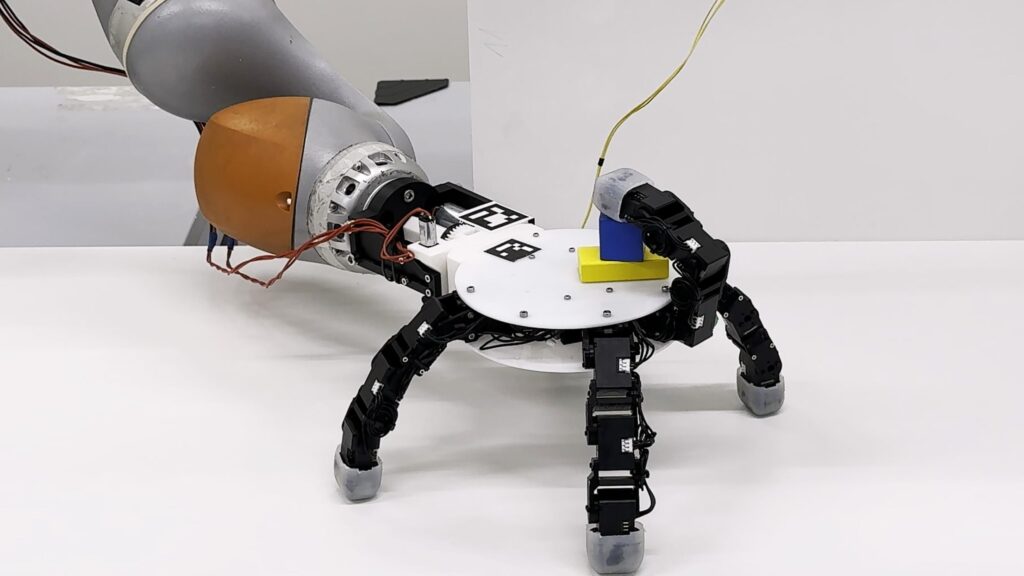
A team composed of Billard, LASA researcher Xiao Gao, and Kai Junge and Josie Hughes from the Computational Robot Design and Fabrication Lab designed a robotic hand that overcomes these challenges. Their device, which can support up to six identical silicone-tipped fingers, fixes the problem of human asymmetry by allowing any combination of fingers to form opposing pairs in a thumb-like pinch. Thanks to its reversible design, the ‘back’ and ‘palm’ of the robotic hand are interchangeable. The hand can even detach from its robotic arm and ‘crawl’, spider-like, to grasp and carry objects beyond the arm’s reach.
“Our device reliably and seamlessly performs ‘loco manipulation’ — stationary manipulation combined with autonomous mobility – which we believe has great potential for industrial, service, and exploratory robotics,” Billard summarizes. The research has been published in Nature Communications.
Human applications – and beyond
While the robotic hand looks like something from a futuristic sci-fi movie, the researchers say they drew inspiration from nature.
“Many organisms have evolved versatile limbs that seamlessly switch between different functionalities like grasping and locomotion. For example, the octopus uses its flexible arms both to crawl across the seafloor and open shells, while in the insect world, the praying mantis use specialized limbs for locomotion and prey capture,” Billard says.
Indeed, the EPFL robot can crawl while maintaining a grip on multiple objects, holding them under its ‘palm’, on its ‘back’, or both. With five fingers, the device can replicate most of the traditional human grasps. When equipped with more than five fingers, it can single-handedly tackle tasks usually requiring two human hands – such as unscrewing the cap on a large bottle or driving a screw into a block of wood with a screwdriver.
“There is no real limitation in the number of objects it can hold; if we need to hold more objects, we simply add more fingers,” Billard says.
The researchers foresee applications of their innovative design in real-world settings that demand compactness, adaptability, and multi-modal interaction. For example, the technology could be used to retrieve objects in confined environments or expand the reach of traditional industrial arms. And while the proposed robotic hand is not itself anthropomorphic, they also believe it could be adapted for prosthetic applications.
“The symmetrical, reversible functionality is particularly valuable in scenarios where users could benefit from capabilities beyond normal human function,” Billard says. “For example, previous studies with users of additional robotic fingers demonstrate the brain’s remarkable adaptability to integrate additional appendages, suggesting that our non-traditional configuration could even serve in specialized environments requiring augmented manipulation abilities.”
Reference
A detachable crawling robotic hand, Xiao Gao (高霄), Kunpeng Yao (姚坤鹏), Kai Junge, Josie Hughes & Aude Billard, Nat Commun 17, 428 (2026).
 Demonstration of the robotic gripper made from langoustine tails. 2025 CREATE Lab EPFL CC BY SA.
Demonstration of the robotic gripper made from langoustine tails. 2025 CREATE Lab EPFL CC BY SA.



