Source: OpenAI’s DALL·E 2 with prompt “a hyperrealistic picture of a robot reading the news on a laptop at a coffee shop”
Welcome to the 6th edition of Robo-Insight, a robotics news update! In this post, we are excited to share a range of new advancements in the field and highlight robots’ progress in areas like medical assistance, prosthetics, robot flexibility, joint movement, work performance, AI design, and household cleanliness.
Robots that can aid nurses
In the medical world, researchers from Germany have developed a robotic system designed to help nurses relieve the physical strain associated with patient care. Nurses often face high physical demands when attending to bedridden patients, especially during tasks like repositioning them. Their work explores how robotic technology can assist in such tasks by remotely anchoring patients in a lateral position. The results indicate that the system improved the working posture of nurses by an average of 11.93% and was rated as user-friendly. The research highlights the potential for robotics to support caregivers in healthcare settings, improving both nurse working conditions and patient care.
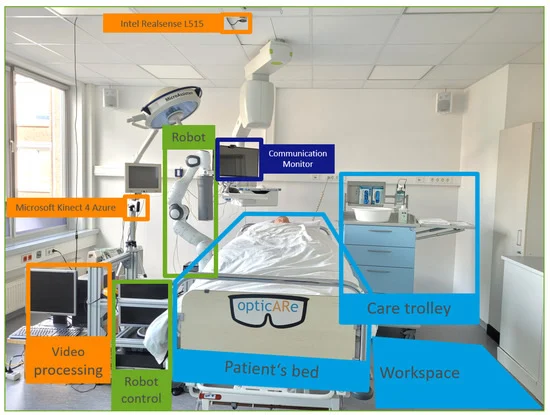
Arrangement of patient room used in the study. Source.
Robots enhancing bionic hand control
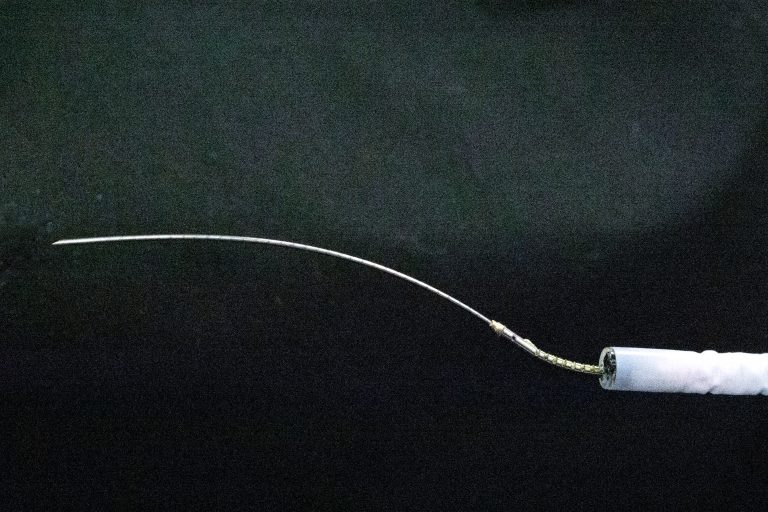
Keeping our focus healthcare-related, recently researchers from numerous European institutions have achieved a significant breakthrough in robot prosthetic technology, as they successfully implanted a neuromusculoskeletal prosthesis, a bionic hand connected directly to the user’s nervous and skeletal systems, in a person with a below-elbow amputation. This achievement involved surgical procedures to place titanium implants in the radius and ulna bones and transfer severed nerves to free muscle grafts. These neural interfaces provided a direct connection between the prosthesis and the user’s body, allowing for improved prosthetic function and increased quality of life. Their work demonstrates the potential for highly integrated prosthetic devices to enhance the lives of amputees through reliable neural control and comfortable, everyday use.
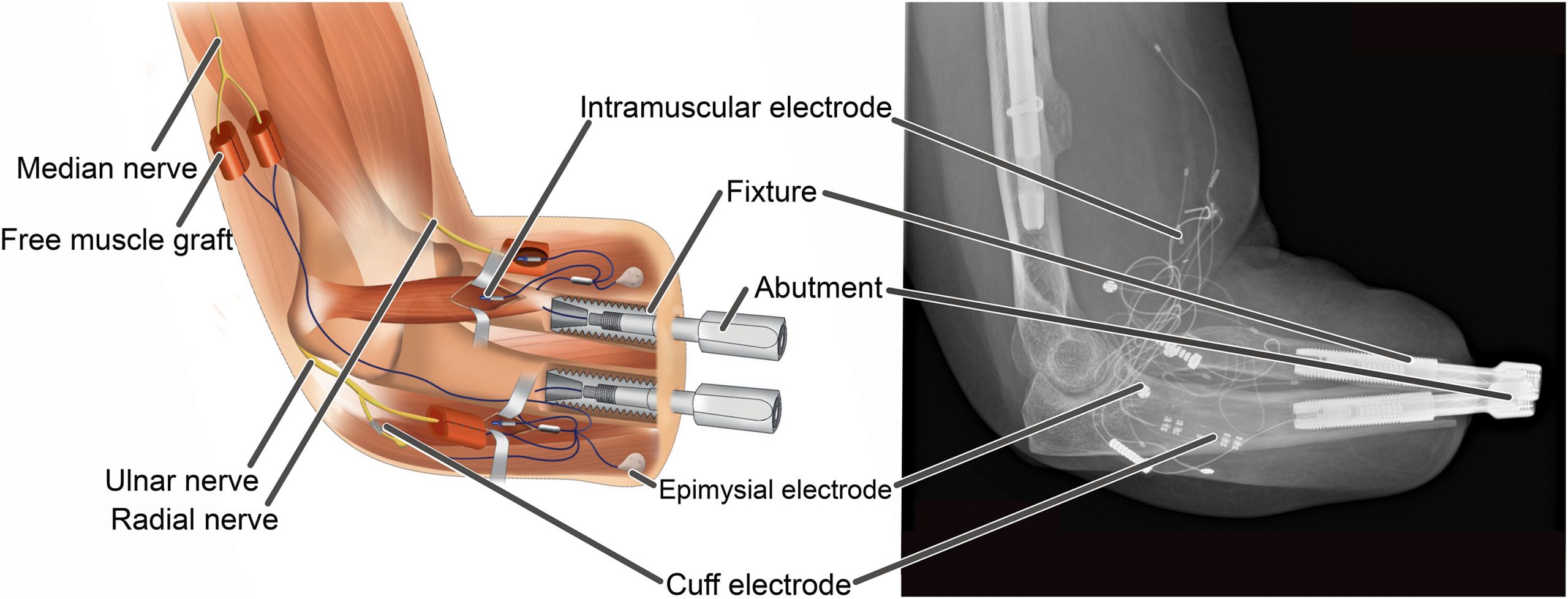
Schematic and X-ray of a fully integrated human-machine interface in a patient. Source.
Reinforcement learning in soft robotics
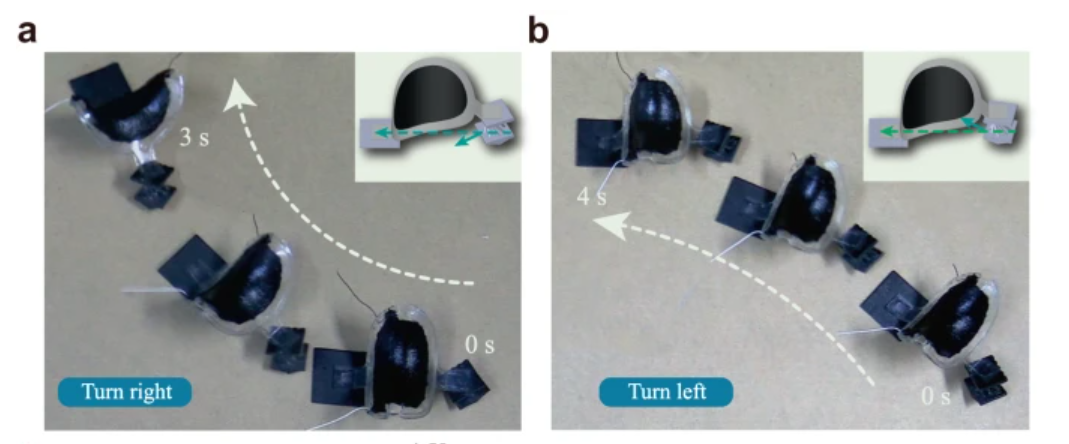
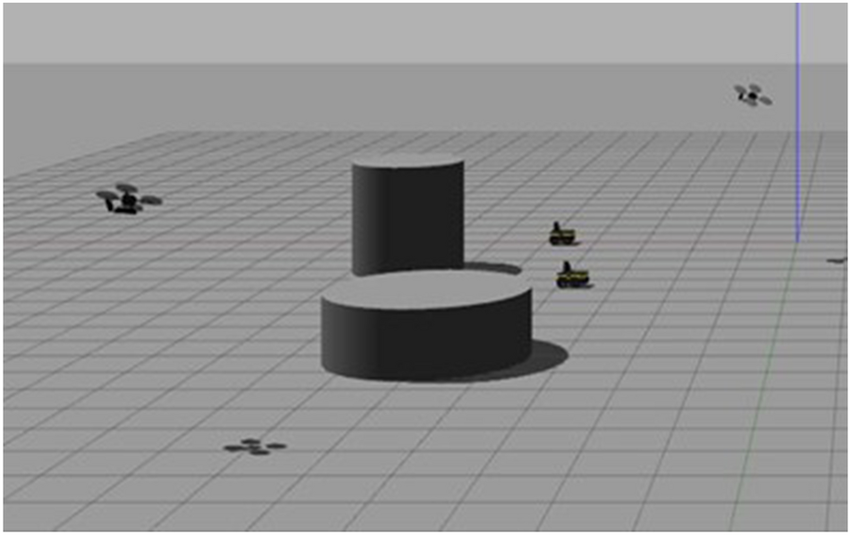
Turning our focus to soft robotics, researchers from the Center for Research and Advanced Studies of the National Polytechnic Institut of Mexico and the Universidad Autónoma de Coahuila have proposed an approach to use reinforcement learning (RL) for motor control of a pneumatic-driven soft robot modeled after continuum media with varying density. This method involves a continuous-time Actor-Critic scheme designed for tracking tasks in a 3D soft robot subject to Lipschitz disturbances. Their study introduces a reward-based temporal difference mechanism and a discontinuous adaptive approach for neural weights in the Critic component of the system. The overall aim is to enable RL to control the complex, uncertain, and deformable nature of soft robots while ensuring stability in real-time control, a crucial requirement for physical systems. This research focuses on the application of RL in managing the unique challenges posed by soft robots.
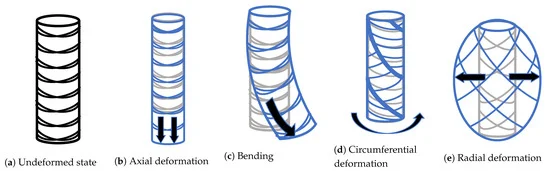
Distinct distortions of a cylindrical-shaped flexible robot. Source.
A teen-sized humanoid robot
Moving onto human-robot interactions, researchers from the University of Texas at Austin’s Human-Centered Robotics Laboratory have introduced a teen-sized humanoid robot named DRACO 3, designed in collaboration with Apptronik. This robot, tailored for practical use in human environments, features proximal actuation and employs rolling contact mechanisms on its lower body, allowing for extensive vertical poses. A whole-body controller (WBC) has been developed to manage DRACO 3’s complex transmissions. This research offers insights into the development and control of humanoids with rolling contact joints, focusing on practicality and performance.
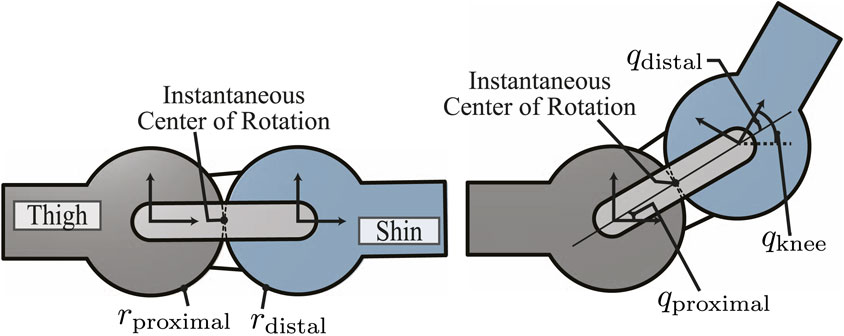
Diagram illustrating the rolling contact joint at the knee. Initial configuration (left) and post-angular displacement (right). Source.
Robots’ impacts on performance
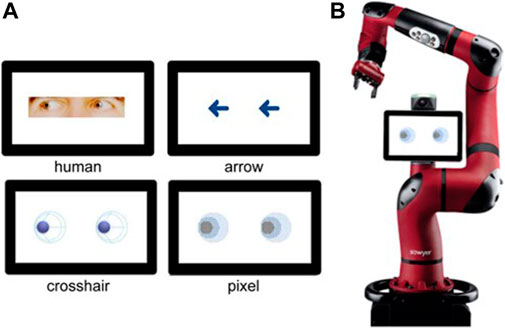
Shifting our focus to psychology, recently researchers from Technische Universität Berlin have investigated the phenomenon of social loafing in human-robot teams. Social loafing refers to reduced individual effort in a team setting compared to working alone. The study involved participants inspecting circuit boards for defects, with one group working alone and the other with a robot partner. Despite a reliable robot that marked defects on boards, participants working with the robot identified fewer defects compared to those working alone, suggesting a potential occurrence of social loafing in human-robot teams. This research sheds light on the challenges associated with human-robot collaboration and its impact on individual effort and performance.
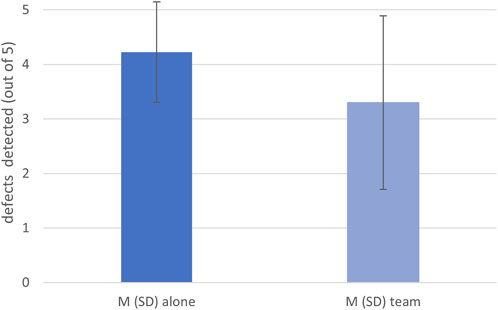
Results of solo work vs. robot work. Source.
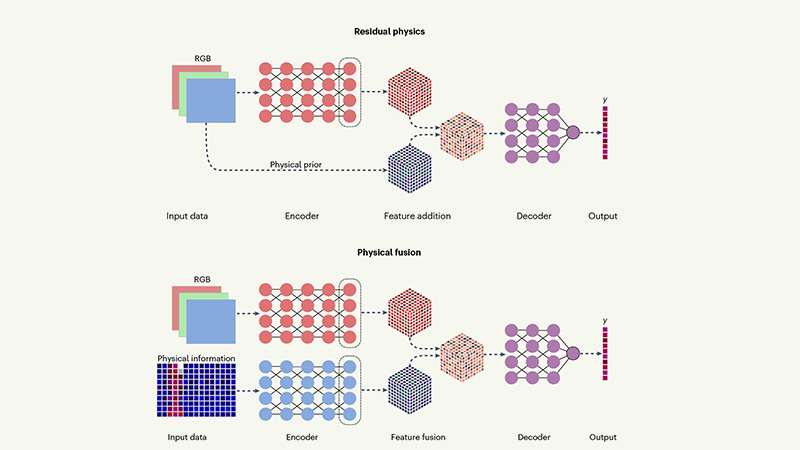
A robot designed by AI
Changing our focus to robot design, researchers from Northwestern University have developed an AI system that designs robots from scratch, enabling it to create a walking robot in seconds, a task that took nature billions of years to evolve. This AI system runs on a lightweight personal computer, without relying on energy-hungry supercomputers or large datasets, offering the potential to design robots with unique forms rapidly. The system works by iterating on a design, assessing its flaws, and refining the structure in a matter of seconds. It paves the way for a new era of AI-designed tools capable of acting directly on the world for various applications.
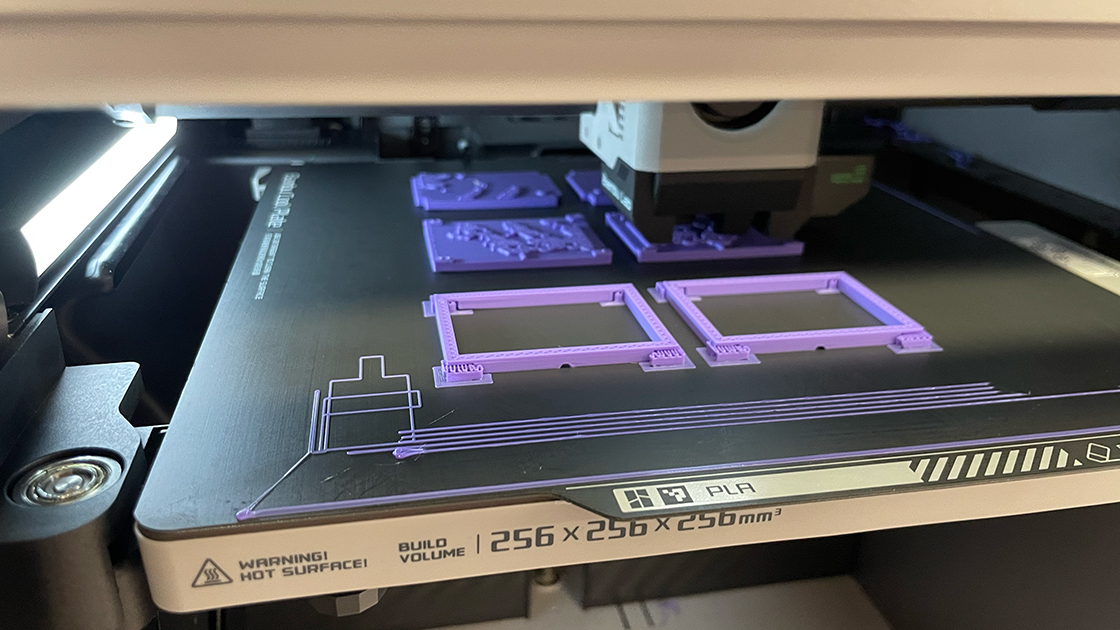
3D printer designing robot. Source.
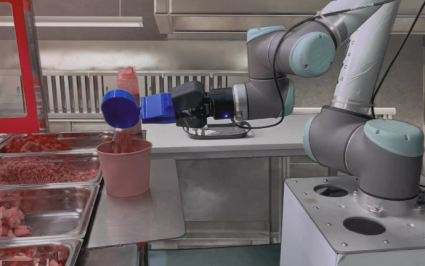
A customizable robot for household organization
Finally, in the field of home robotics, researchers from Stanford, Princeton, Columbia University, and Google, have developed TidyBot, a one-armed robot designed to clean spaces according to personal preferences. TidyBot uses a large language model trained on internet data to identify various objects and understand where to put them, making it highly customizable to different preferences. In real-world tests, the robot can correctly put away approximately 85% of objects, significantly improving household organization. While TidyBot still has room for improvement, researchers believe it holds great promise for making robots more versatile and useful in homes and other environments.

Tidybot in training. Source.
The ongoing development in a multitude of sectors highlights the flexibility and steadily advancing character of robotics technology, uncovering fresh possibilities for its incorporation into a wide range of industries. The progressive expansion in the realm of robotics mirrors unwavering commitment and offers a glimpse into the potential consequences of these advancements for the times ahead.
Sources:
- Hinrichs, P., Seibert, K., Arizpe Gómez, P., Pfingsthorn, M., & Hein, A. (2023). A Robotic System to Anchor a Patient in a Lateral Position and Reduce Nurses’ Physical Strain. Robotics, 12(5)
- Ortiz-Catalán, M., Zbinden, J., Millenaar, J., D’Accolti, D., Controzzi, M., Clemente, F., Cappello, L., Earley, E. J., Enzo Mastinu, Justyna Kolankowska, Munoz-Novoa, M., Stewe Jönsson, Njel, C., Paolo Sassu, & Rickard Brånemark. (2023). A highly integrated bionic hand with neural control and feedback for use in daily life. Science Robotics
- Pantoja-Garcia, L., Parra-Vega, V., Garcia-Rodriguez, R., & Vázquez-García, C. E. (2023). A Novel Actor—Critic Motor Reinforcement Learning for Continuum Soft Robots. Robotics, 12(5)
- Bang, S. H., Gonzalez, C., Ahn, J., Paine, N., & Sentis, L. (2023, September 26). Control and evaluation of a humanoid robot with rolling contact joints on its lower body. Frontiers.
- Cymek, D. H., Truckenbrodt, A., & Onnasch, L. (2023, August 31). Lean back or lean in? exploring social loafing in human–robot teams. Frontiers.
- Instant evolution: AI designs new robot from scratch in seconds. (n.d.). News.northwestern.edu.
- University, S. (2023, October 3). Robot provides personalized room cleanup. Stanford News.