Courtesy of 1X.
Courtesy of 1X.
By Eduardo B. Sandoval, UNSW Sydney
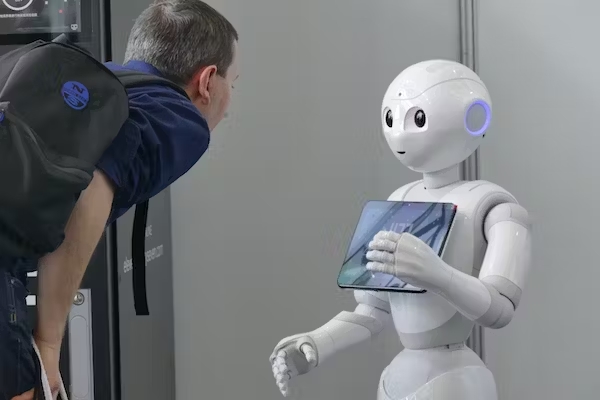
Last year, Norwegian-US tech company 1X announced a strange new product: “the world’s first consumer-ready humanoid robot designed to transform life at home”.
Standing 168 centimetres tall and weighing in at 30 kilograms, the US$20,000 Neo bot promises to automate common household chores such as folding laundry and loading the dishwasher.
Neo has a built-in artificial intelligence (AI) system, but for tricky tasks it requires a 1X employee wearing a virtual reality helmet to remotely take over the robot. The operator can see whatever the bot does inside your house, and the process is recorded for future learning.
Other household androids are expected to hit the market this year. But Neo shows the issues at play, which will be familiar to anyone who has watched the AI boom of the past few years: products launched with great fanfare and limited capabilities, concealed privacy risks, and invisible remote workers behind the scenes.
The dream of human-like robots
Machines made in the human likeness have figured in mythology and history for millennia.
But the idea they might realistically be practical consumer products is more recent. Yet it’s a popular one: more than 50 companies around the world are developing this type of robot.
Why now? The past few years have seen improvements in hardware such as batteries, motors and sensors – many thanks to the burgeoning electric vehicle industry. At the same time, the AI systems to control the hardware have also become far more capable.
Hurdles remain
Despite huge technical progress, these robots are still clumsy at handling everyday tasks in homes or hospitals or other uncontrolled environments. While specialised bots such as vacuum cleaners have become a familiar sight, the fact remains that human homes aren’t designed for robots.
And for many fiddly tasks, such as folding laundry, more specialised machines do a better job.
To improve performance, the robots will need a lot of real-world data. The best way to gather that data is by putting these mechanical servants to work in actual homes. And the data in question will include a lot of intimate detail about the lives of specific people – which raises big questions about privacy.
And behind the scenes, at least for now, will be humans. Remote online labour in the tech industry is a growing phenomenon that can increase socioeconomic inequality and have a negative impact on people in developing countries working long hours for low pay, often exposed to disturbing scenes and content.
Other uses for humanoid bots
According to the International Federation of Robotics, useful and widely accepted home androids may still be 20 years away.
But there are other reasons we might want to make artificial humanoids. Japanese researcher Hiroshi Ishiguro has been making human-like “geminoids” for decades with quite different motivations.
My motivation for making humanoid robots stems from an interest in understanding what makes us human, and what it means to be human.
From this perspective, humanoid robots can serve the philosophical exploration of human identity, rather than making life more convenient or generating profits.
What’s ahead
Autonomous humanoid robots will undoubtedly improve as products with the integration of large language models and other generative AI systems.
In the long term, dexterity, navigation, learning and autonomy will get better – but that will require years of research and investment. Humanoid robots will not be immediately available as convincing and useful commercial products.
Concerns around remote work may fade, too. Just last week, 1X announced a software update for its robots that it says will mean less human involvement behind the scenes.
Privacy concerns seem an inherent risk of the technology. An incredibly sophisticated robot in your home will inevitably collect intimate data about your life, opening a new frontier for data exploitation and potential breaches.
Despite these issues, humanoid robots will keep inspiring scientists, engineers and designers. By all means let them inspire us – but we should think twice before letting them stack our dishwashers.![]()
Eduardo B. Sandoval, Scientia Researcher, Social Robotics, UNSW Sydney
This article is republished from The Conversation under a Creative Commons license. Read the original article.




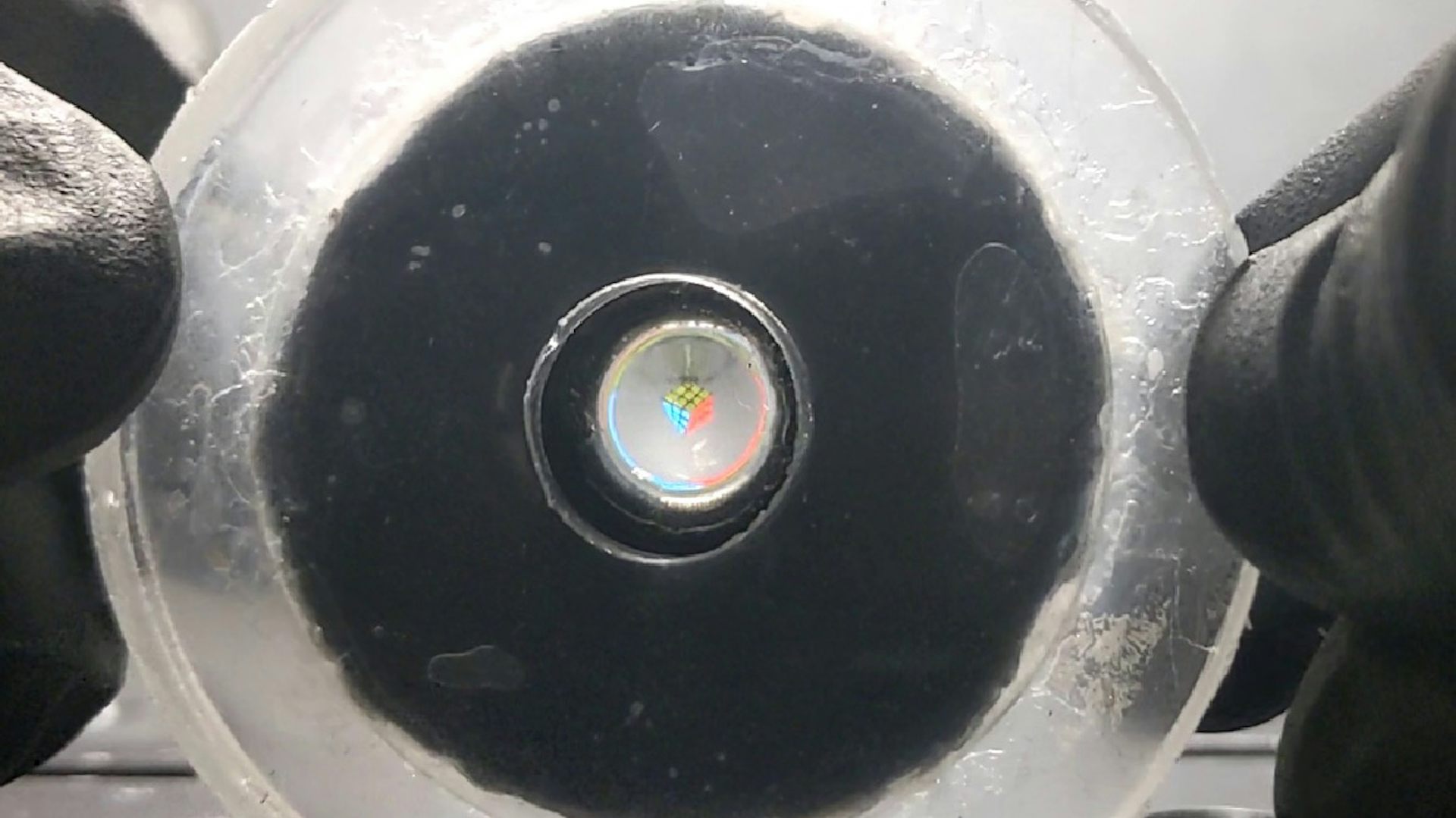 This rubbery disc is an artificial eye that could give soft robots vision. Image credit: Corey Zheng/Georgia Institute of Technology.
This rubbery disc is an artificial eye that could give soft robots vision. Image credit: Corey Zheng/Georgia Institute of Technology.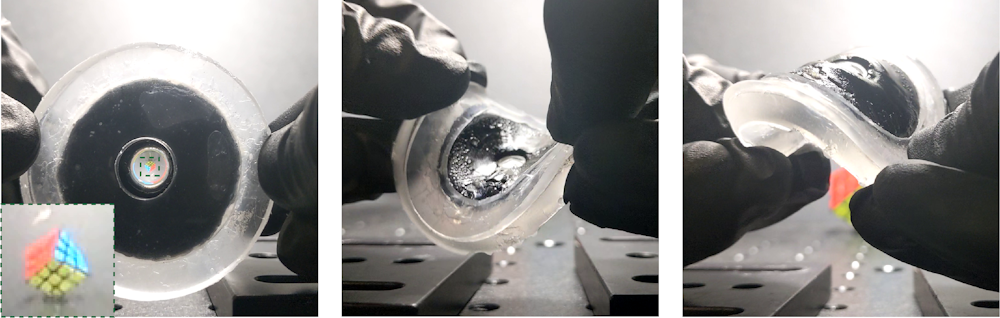
 Scientists absorb data on monitors in mission control for NASA’s Perseverance Mars rover. NASA/Bill Ingalls, CC BY-NC-ND.
Scientists absorb data on monitors in mission control for NASA’s Perseverance Mars rover. NASA/Bill Ingalls, CC BY-NC-ND.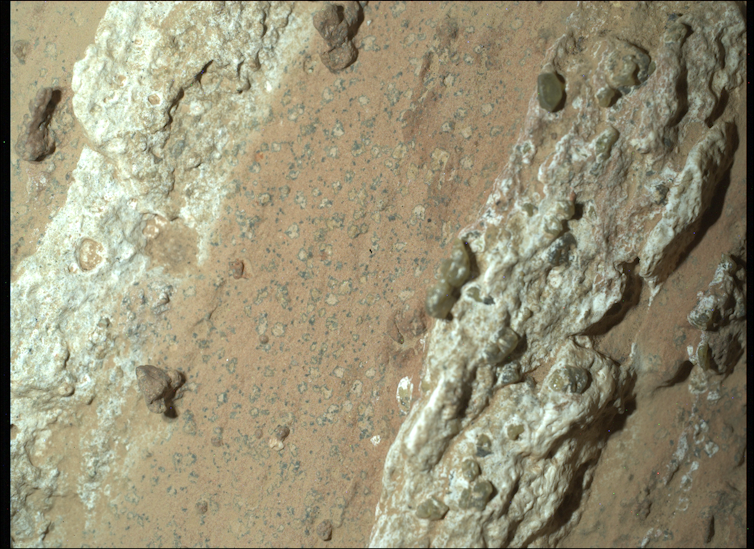 Bright Angel rock surface at the Beaver Falls site on Mars shows nodules on the right and a leopard-like pattern at the center.
Bright Angel rock surface at the Beaver Falls site on Mars shows nodules on the right and a leopard-like pattern at the center. 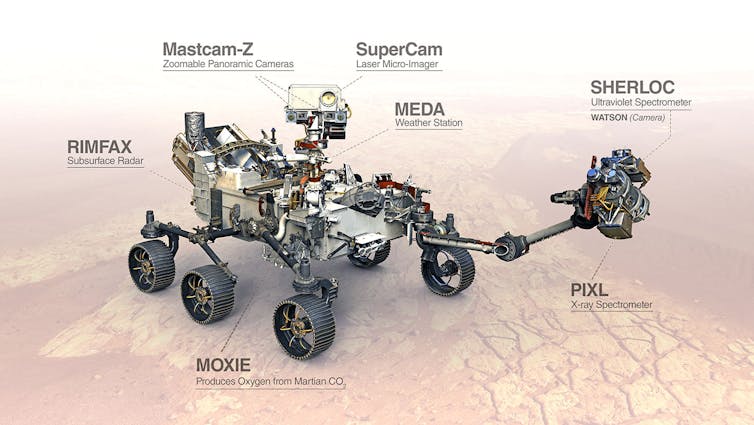 Key Perseverance Mars Rover instruments used in this analysis.
Key Perseverance Mars Rover instruments used in this analysis.  Perseverance selfie at Cheyava Falls sampling site in the Beaver Falls location.
Perseverance selfie at Cheyava Falls sampling site in the Beaver Falls location. 















 A drone in surf lifesaver NSW livery preparing to go on patrol. Author provided.
A drone in surf lifesaver NSW livery preparing to go on patrol. Author provided.
 Example of where the AI gets it wrong – seaweed identified as sharks. Author provided.
Example of where the AI gets it wrong – seaweed identified as sharks. Author provided.