Europe has an estimated EUR 100 billion worth of unexploited mineral resources lying at depths of 500-1,000 m. Following centuries of active mining, the continent's more accessible mineral deposits are mostly depleted. However, there are still deep-lying resources in abandoned flooded mines and in unmined underwater deposits that can't be exploited using conventional dry mining techniques.
People are prepared to save a robot at the cost of human lives under certain conditions. One of these situations is when we believe the robot can experience pain. This has been indicated in research led by the team of Sari Nijssen of Radboud University, in collaboration with Barbara Müller of Radboud University and Markus Paulus from LMU Munich, which will appear in Social Cognition on 7 February.
Regardless of the size of the company or industry in which it operates, adding automation into a business environment can mean a significant shift in the way an organization conducts itself.
Ease-of-use is a key element for improving maintenance pains for electronics manufacturers. When the robotic cell is designed for simplicity, it makes maintenance and management much easier for electronic manufacturers.
A new design in firefighting robots, already successfully tested in the field, could make firefighters' jobs less dangerous and address one of the biggest challenges with firefighting robots – the ability to maneuver in a burning structure.
Japanese investment and telecoms giant SoftBank puts $37m into next generation robotics company Boston Dynamics after it bought the business from Google.
Booth #5095 - In the Factory of The Future exhibit, OMRON pick and place automation demonstrates the potential for machines to manage fine detail work with speed and accuracy.
Booth #5014 - The next generation of AquaGard 7350 Conveyors feature an improved frame design, nose bar transfer options and the industry’s safest and most robust curve modular chain.
Booth #4211 - Vendors will want to stop by to see Epson Force Guidance technology, the T6 SCARA Robot Dispense Demonstration, and the LS3 Force Feeder Demonstration.
Booth #4139 - DENSO's newest 6 axis robot, Cobotta, we have targeted the marketing of small, delicate parts handling, with the selection of both an industrial mode of operation, as well as, a collaborative mode of operation.
Booth #4481 (co-exhibiting with Futura Automation) - Gecko Gripper, that uses millions of micro-scaled fibrillar stalks that adhere to a surface using powerful van der Waals forces — the same way that geckos climb.
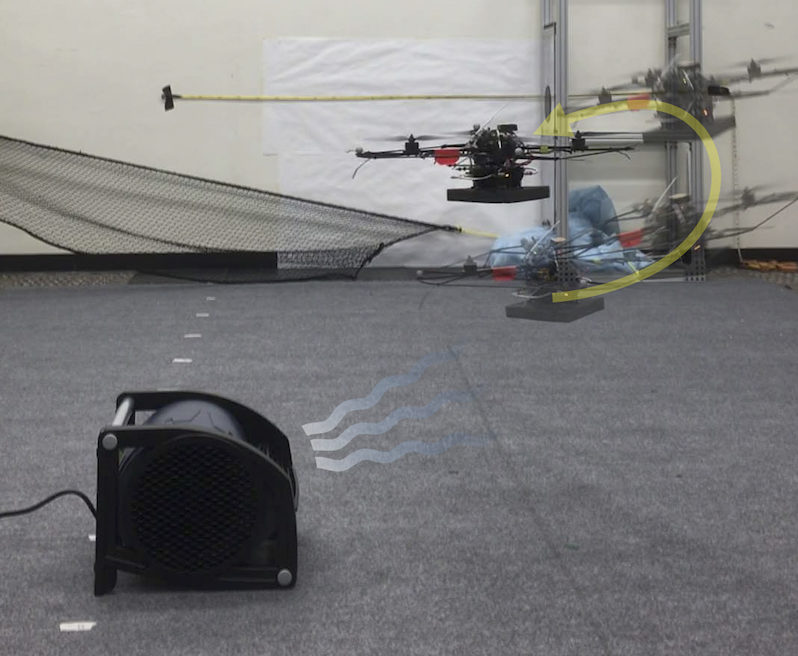
In this interview, Audrow Nash interviews Jaime Fernández Fisac, a PhD student at University of California, Berkeley, in Anca Dragan’s InterACT Lab. Fisac is interested in ensuring that autonomous systems such as self-driving cars, delivery drones, and home robots can operate and learn in the world—while satisfying safety constraints. Towards this goal, Fisac discusses different examples of his work with unmanned aerial vehicles and talks about safe robot learning in general; including, the curse of dimensionality and how it impacts control problems (including how some systems can be decomposed into simpler control problems), how simulation can be leveraged before trying learning on a physical robot, safe sets, and how a robot can modify its behavior based on how confident it is that its model is correct.
Below are two videos of work that was discussed during the interview. The top video is on a framework for learning-based control, and the bottom video discusses adjusting the robot’s confidence about a human’s actions based on how predictably the human is behaving.
Jaime Fernández Fisac
Jaime Fernández Fisac is a final-year Ph.D. candidate in Electrical Engineering and Computer Sciences at the University of California, Berkeley. He received a B.S./M.S. degree in Electrical Engineering from the Universidad Politécnica de Madrid, Spain, in 2012, and a M.Sc. in Aeronautics from Cranfield University, U.K., in 2013. He is a recipient of the La Caixa Foundation fellowship. His research interests lie between control theory and artificial intelligence, with a focus on safety assurance for autonomous systems. He works to enable AI systems to reason explicitly about the gap between their models and the real world, so that they can safely interact with uncertain environments and human beings, even under inaccurate assumptions.
 Jaime Fernández Fisac is a final-year Ph.D. candidate in Electrical Engineering and Computer Sciences at the University of California, Berkeley. He received a B.S./M.S. degree in Electrical Engineering from the Universidad Politécnica de Madrid, Spain, in 2012, and a M.Sc. in Aeronautics from Cranfield University, U.K., in 2013. He is a recipient of the La Caixa Foundation fellowship. His research interests lie between control theory and artificial intelligence, with a focus on safety assurance for autonomous systems. He works to enable AI systems to reason explicitly about the gap between their models and the real world, so that they can safely interact with uncertain environments and human beings, even under inaccurate assumptions.
Jaime Fernández Fisac is a final-year Ph.D. candidate in Electrical Engineering and Computer Sciences at the University of California, Berkeley. He received a B.S./M.S. degree in Electrical Engineering from the Universidad Politécnica de Madrid, Spain, in 2012, and a M.Sc. in Aeronautics from Cranfield University, U.K., in 2013. He is a recipient of the La Caixa Foundation fellowship. His research interests lie between control theory and artificial intelligence, with a focus on safety assurance for autonomous systems. He works to enable AI systems to reason explicitly about the gap between their models and the real world, so that they can safely interact with uncertain environments and human beings, even under inaccurate assumptions.