Therapy with the suite of InMotion upper extremity products guides patients through specific tasks, aiming to improve motor control of the arm by increasing strength, range of motion and coordination.
Purdue University researchers in the School of Electrical and Computer Engineering are developing integrative language and vision software that may enable an autonomous robot to interact with people in different environments and accomplish navigational goals.
In this episode, Audrow Nash interviews Pauline Pound, Philippe Morere, and Yujung Liu about the work they presented at the 2018 International Conference on Intelligent Robots and Systems (IROS) in Madrid, Spain.
Pauline Pounds, Associate Professor at the University of Queensland, speaks about building robots that can endure children. She discusses the tradeoffs of designing a robot that can survive children and cannot harm the children. Pounds talks about how the robot has performed with children so far, the hardware design, and her future direction with this work.
Philippe Morere, a PhD student at University of Sydney, speaks about reinforcement learning in partially observable environments. Morere discusses the intuition behind this work and the problems that he solved using this approach.
Yujung Liu, a master’s student from the National Taiwan University, speaks about a painting robot. He discusses how the portrait is constructed, including how colors are chosen, how the features are made cartoon-like, and his future direction.
Hundreds of small robots can work in a team to create biology-inspired shapes – without an underlying master plan, purely based on local communication and movement.
Jamare Bates is a licensed professional engineer and FAA-certified remote unmanned aircraft vehicle pilot who heads UAS operations for Black & Veatch, a global construction and engineering company.
Global technology leader returns with AI-equipped table tennis tutor and a glimpse at the factory floor of the near-future, in which humans and machines work collaboratively
This biocompatible sensor is made from a non-toxic, highly conductive liquid solution that could be used in diagnostics, therapeutics, human-computer interfaces, and virtual reality. Credit: Harvard SEAS By Leah Burrows
Children born prematurely often develop neuromotor and cognitive developmental disabilities. The best way to reduce the impacts of those disabilities is to catch them early through a series of cognitive and motor tests. But accurately measuring and recording the motor functions of small children is tricky. As any parent will tell you, toddlers tend to dislike wearing bulky devices on their hands and have a predilection for ingesting things they shouldn’t.
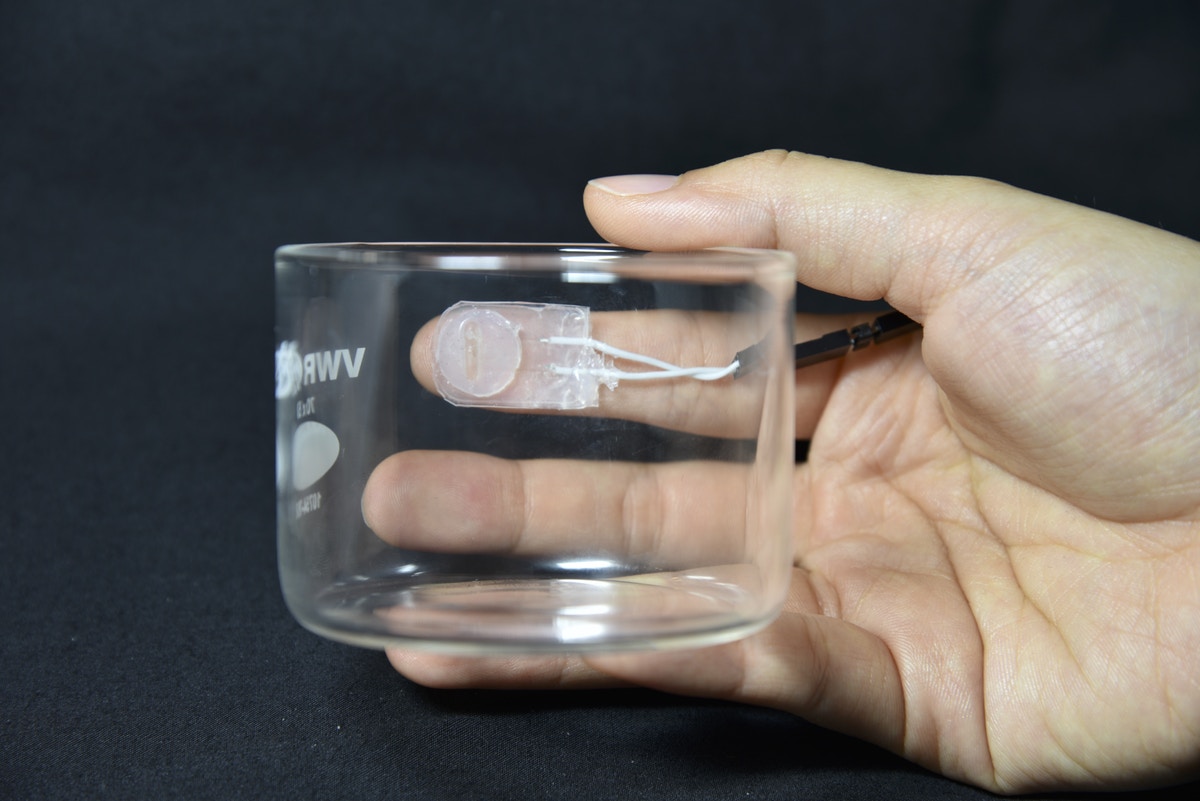
Harvard University researchers have developed a soft, non-toxic wearable sensor that unobtrusively attaches to the hand and measures the force of a grasp and the motion of the hand and fingers.
The research was published in Advanced Functional Materials and is a collaboration between the Wyss Institute for Biologically Inspired Engineering, The Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS), Beth Israel Deaconess Medical Center, and Boston Children’s Hospital.
One novel element of the sensor is a non-toxic, highly conductive liquid solution.
“We have developed a new type of conductive liquid that is no more dangerous than a small drop of salt water,” said Siyi Xu, a graduate student at SEAS and first author of the paper. “It is four times more conductive than previous biocompatible solutions, leading to cleaner, less noisy data.”
The sensing solution is made from potassium iodide, which is a common dietary supplement, and glycerol, which is a common food additive. After a short mixing period, the glycerol breaks the crystal structure of potassium iodide and forms potassium cations (K+) and iodide ions (I-), making the liquid conductive. Because glycerol has a lower evaporation rate than water, and the potassium iodide is highly soluble, the liquid is both stable across a range of temperatures and humidity levels, and highly conductive.
“Previous biocompatible soft sensors have been made using sodium chloride-glycerol solutions but these solutions have low conductivities, which makes the sensor data very noisy, and it also takes about 10 hours to prepare,” said Xu. “We’ve shortened that down to about 20 minutes and get very clean data.”
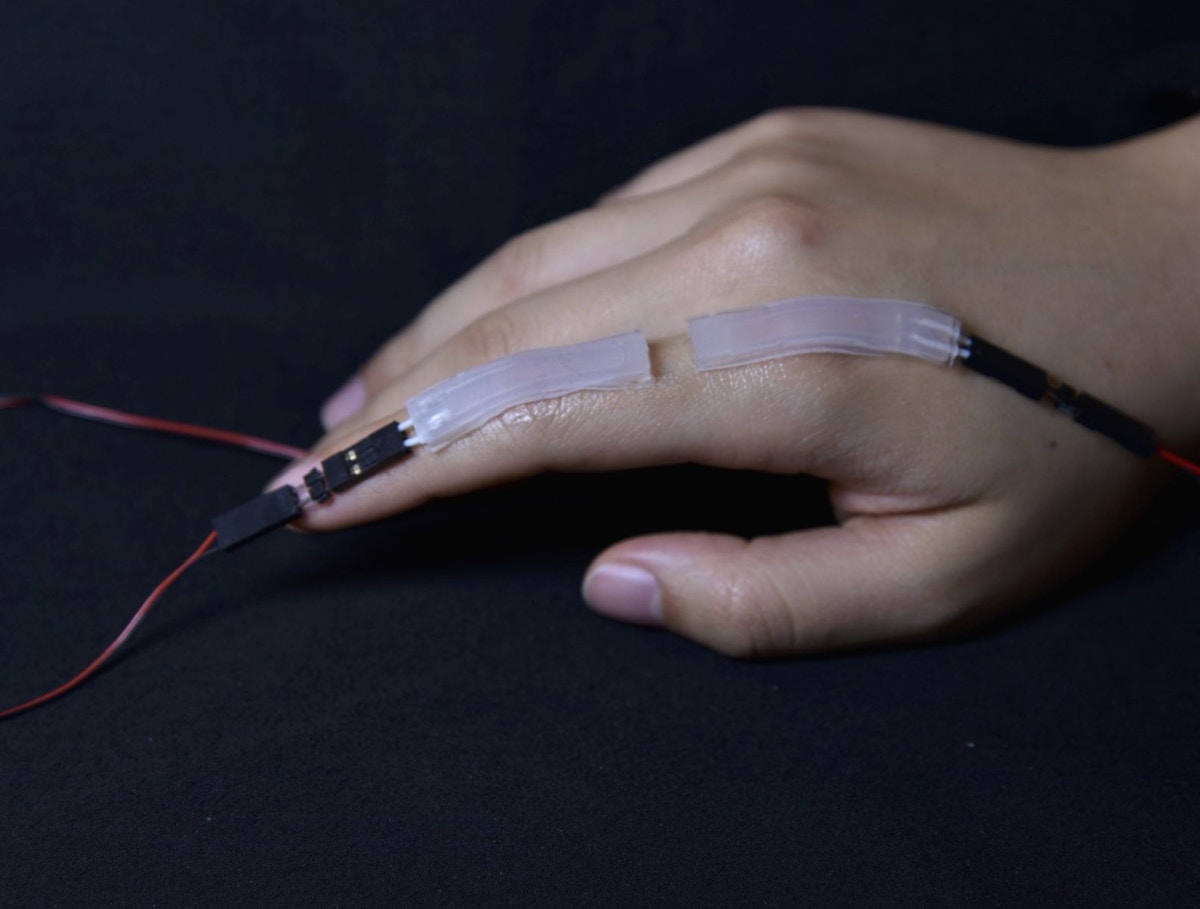
Safe, soft sensors on the top and tip of the index finger detect the movements, strain and force of the finger while performing different activities, such as flexing and extending the finger and picking up weights and boxes. Credit: Harvard SEAS
The design of the sensors also takes the need of children into account. Rather than a bulky glove, the silicon-rubber sensor sits on top of the finger and on the finger pad.
“We often see that children who are born early or who have been diagnosed with early developmental disorders have highly sensitive skin,” said Eugene Goldfield, Ph.D., coauthor of the study, and Associate Faculty Member of the Wyss Institute at Harvard University and an Associate Professor in the Program in Behavioral Sciences at Boston Children’s Hospital and Harvard Medical School. “By sticking to the top of the finger, this device gives accurate information while getting around the sensitively of the child’s hand.”
Goldfield is the Principal investigator of the Flexible Electronics for Toddlers project at the Wyss Institute, which designs modular robotic systems for toddlers born prematurely and at risk for cerebral palsy.
Goldfield and his colleagues currently study motor function using the Motion Capture Lab at SEAS and Wyss. While motion capture can tell a lot about movement, it cannot measure force, which it critical to diagnosing neuromotor and cognitive developmental disabilities.
“Early diagnosis is the name of the game when it comes to treating these developmental disabilities and this wearable sensor can give us a lot of advantages not currently available,” said Goldfield.
This paper only tested the device on adult hands. Next, the researchers plan to scale down the device and test it on the hands of children.
“The ability to quantify complex human motions gives us an unprecedented diagnostic tool,” says senior author Robert Wood, Ph.D., Founding Core Faculty Member of the Wyss Institute and the Charles River Professor of Engineering and Applied Sciences at SEAS. “The focus on the development of motor skills in toddlers presents unique challenges for how to integrate many sensors into a small, lightweight, and unobtrusive wearable device. These new sensors solve these challenges – and if we can create wearable sensors for such a demanding task, we believe that this will also open up applications in diagnostics, therapeutics, human-computer interfaces, and virtual reality.”
This research was also authored by SEAS researcher Daniel M. Vogt; Wyss Institute researchers Wen-Hao Hsu, John Osborne, Timothy Walsh, Jonathan R. Foster, Sarah K. Sullivan, and Andreas Rousing; and Beth Israel Deaconess Medical Center researcher Vincent C. Smith. It was supported by the National Institutes of Health.
It is the middle of the winter and a six-month-old child is brought with acute respiratory distress to a nursing station in a remote community in the Canadian North.
The nurse realizes that the child is seriously ill and contacts a pediatric intensivist located in a tertiary care centre 900 kilometres away. The intensivist uses her tablet to activate a remote presence robot installed in the nursing station and asks the robot to go to the assessment room.
The robot autonomously navigates the nursing station corridors and arrives at the assessment room two minutes later. With the help of the robot’s powerful cameras, the doctor “sees” the child and talks to the nurse and the parents to obtain the medical history. She uses the robot’s stethoscope to listen to the child’s chest, measures the child’s oxygen blood saturation with a pulse oximeter and performs an electrocardiogram.
With the robot’s telestrator (an electronic device which enables the user to write and draw freehand over a video image) she helps the nurse to start an intravenous line and commences therapy to treat the child’s life-threatening condition.
This is not science fiction. This remote presence technology is currently in use in Saskatchewan, Canada — to provide care to acutely ill children living in remote Northern communities.
Treating acutely ill children
Advances in telecommunication, robotics, medical sensor technology and artificial intelligence (AI) have opened the door for solutions to the challenge of delivering remote, real-time health care to underserviced rural and remote populations.
A team uses a remote presence robot to see a patient in the emergency room. (University of Saskatchewan), Author provided
In Saskatchewan, we have established a remote medicine program that focuses on the care of the most vulnerable populations — such as acutely ill children, pregnant women and the elderly.
We have also shown that this technology prevents delays in diagnosis and treatment and results in substantial savings to the health-care system.
Prenatal ultrasounds for Indigenous women
Remote communities often lack access to diagnostic ultrasonography services. This gap disproportionally affects Indigenous pregnant women in the Canadian North and results in increases in maternal and newborn morbidity and mortality.
We are pioneering the use of an innovative tele-robotic ultrasound system that allows an expert sonographer to perform a diagnostic ultrasound study, in real time, in a distant location.
The first tele-robotic ultrasonography systems have been deployed to two northern Saskatchewan communities and are currently performing prenatal ultrasounds.
Emergency room trauma assessment
Portable remote presence devices that use available cellular networks could also be used in emergency situations, such as trauma assessment at the scene of an accident or transport of a victim to hospital.
For example, emergency physicians or trauma surgeons could perform real-time ultrasonography of the abdomen, thorax and heart in critically injured patients, identify life-threatening injuries and start life-saving treatment.
Wearable remote presence devices such a Google Glass technology are the next step in remote presence health care for underserviced populations.
For example, a local nurse and a specialist in a tertiary care centre thousand of kilometres away could assess together an acutely ill patient in an emergency room in a remote community through the nurse’s eyes.
A nurse examines a patient with Google Glass. (University of Saskatchewan), Author provided
Although remote presence technology may be applied initially to emergency situations in remote locations, its major impact may be in the delivery of primary health care. We can imagine the use of mobile remote presence devices by health professionals in a wide range of scenarios — from home-care visits to follow-up mental health sessions — in which access to medical expertise in real time would be just a computer click away.
A paradigm shift in health-care delivery
The current model of centralized health care, where the patient has to go to a hospital or a clinic to receive urgent or elective medical care, is inefficient and costly. Patients have to wait many hours in emergency rooms. Hospitals run at overcapacity. Delays in diagnosis and treatment cause poor outcomes or even death.
Underserviced rural and remote communities and the most vulnerable populations such as children and the elderly are the most affected by this centralized model.
Remote presence technologies have the potential to shift this — so that we can deliver medical care to a patient anywhere. In this decentralized model, patients requiring urgent or elective medical care will be seen, diagnosed and treated in their own communities or homes and patients requiring hospitalization will be triaged without delay.
This technology could have important applications in low-resource settings. Cellular network signals around the globe and rapidly increasing bandwidth will provide the telecommunication platform for a wide range of mobile applications.
Low-cost, dedicated remote-presence devices will increase access to medical expertise for anybody living in a geographical area with a cellphone signal. This access will be especially beneficial to people in developing countries where medical expertise is insufficient or not available.
The future of medical care is not in building more or bigger hospitals but in harnessing the power of technology to monitor and reach patients wherever they are — to preserve life, ensure wellness and speed up diagnosis and treatment.
In spite of what most are writing, it was a year of much progress.
A number of other summaries of 2018 in robocars have called it a bad year, the year it all went south, even the year the public realized that robocars will never come.
In fact, 2018 was the year the field reached a new level of maturity, as its warts began to show, and we saw the first missteps (minor and major) and the long anticipated popping of some of the hype.
As predicted by Gartner’s famous “hype cycle” any highly-hyped technology goes through a “trough of disillusionment” after the initial surge.I see several reasons why the trough is happening now:
The public is starting to understand some realities which have not been very well conveyed to them, though they were known by the major teams:
This is a very hard task
It is geographic in nature, due to the need of mapping and local driving rules, and so it begins in limited areas and grows from there.
The amount of QA needed to get to unmanned operation is immense, and if you have money, there is no reason to remove safety drivers until you’re quite sure.
The so called “level 5” isn’t on any serious roadmap, and may never happen
Cars showed up at the peak of Gartner’s very own chart a couple of years ago, so it’s just about time in their rulebook
It’s very typical in software for dates to slip.People predict when they hope they can make a target, which is really the beginning of the time window in their estimate.
Some people, such as Elon Musk, have made irresponsibly optimistic predictions, leading the public to imagine their drive-everywhere robocar is coming next year.
If you follow Gartner’s literal curve, they had robocars at the top in 2015.So the trough doesn’t really even need a reason.But I think there will be multiple peaks and troughs.
In reality, the plan at Waymo and many other companies has always been to build a car that serves a limited set of streets — a small set of easy streets — at the start, and then starts growing the network of streets, and eventually towns with streets, as time goes by.
There is going to be a big surge once the technology reaches a level where the remaining problems are no longer technological as logistic.That is to say, when the barrier to expanding to new streets and cities is the detailed work of mapping those streets, learning the local rules and working with local governments.That’s when the “land rush” happens.The limiting factor there is time and talent more than it’s money.
But none of that happens until the cars are ready for deployment, and until they are, they will be tested as prototypes with safety drivers in them.Even the first prototype services, like Waymo’s and Zoox’s and others, will have safety drivers in them.
The Uber fatality — the top story of the year
No question the big story this year was the death of Elaine Herzberg as the result of a compound series of errors and bad practices at Uber.The story is notable for many reasons, including of course how it happened, but also in the public’s reaction. For a long time, I’ve been assured by many skeptics that the first death would mean the end of the robocar dream.The public actually thinks the first deaths were in Teslas (they weren’t) and Tesla stock went up after they took places. The Uber fatality was real, and did teach us that teams are capable of more negligence than I had thought. While it did scale up public distrust, and Uber did shut down their program for at least a year, the overall effect still seems modest.(The larger effect will be much greater intolerance for the next fatality, the one that would have been the first.)
Waymo remains the clear leader in the field, so the next top story has to be about them, but sadly it’s the story of their first miss — promising to launch in 2018 and feeling forced to do a “launch” that was really just a formalization of existing activity. I believe that Uber is partly to blame here, in that it did use up a lot of the public’s tolerance for errors, especially in the Phoenix area.Waymo soft launches in Phoenix, but
The better story for Waymo, however, was their first totally unmanned operations earlier in the year.This also disappointed people because these unmanned operations were on a much more limited scale than people originally imagined, but it’s still a major milestone.It means Waymo’s team convinced the lawyers and board that the systems were good enough to take this risk, even if only in a limited area. Waymo goes totally unmanned, arbitration and other news
This was also the year that “flying cars” also known as e-VTOL aircraft, “took off.”It’s now clear the engineering problems are close to solved, though many social and logistic problems remain.These vehicles are at the stage robocars were 10 years ago, and the excitement is building.Sebastian Thrun, the modern “father of self-driving cars” and the man who first got me excited about them, has switched his efforts to flying.I’ll be writing more on this in the coming year.
Take your quality inspections to the next level with tailor-made 3D solutions from SICK, Inc. The TriSpector1000 is a stand-alone, configurable 3D vision sensor that reliably inspects objects regardless of variations in color, height, shape, or position. It is suited for solving quality control issues and can be used for volume & thickness measurement and inspection of box integrity. Check out SICK's quality inspection solutions at Pack Expo 2019 in Booth #LS-6419.
LiDAR (Light Detection and Ranging) is one of the most reliable methods for parts sensing in factory automation today. SICK has made this technology affordable and easy to use! Click on the video link below to learn about the TiM1xx LiDAR sensor and how it provides: - Area scanning LiDAR technology in a standard sensor package - 200-degree field of view and 3 meter sensing range allows for 169 square feet of area scanning - Compact size and light weight enables ease of deployment in "non-standard" type applications, like end-of-arm robotic tooling - Wide area scanning without having to mount a transmitter and receiver makes installation much easier - IO Link for easy configuration