Using Mesh Network Applications for Robotics
Many companies make mesh network products for home Wi-Fi systems. Those are indeed valid and popular applications, but there are ample opportunities to use mesh networks for robotics, too.
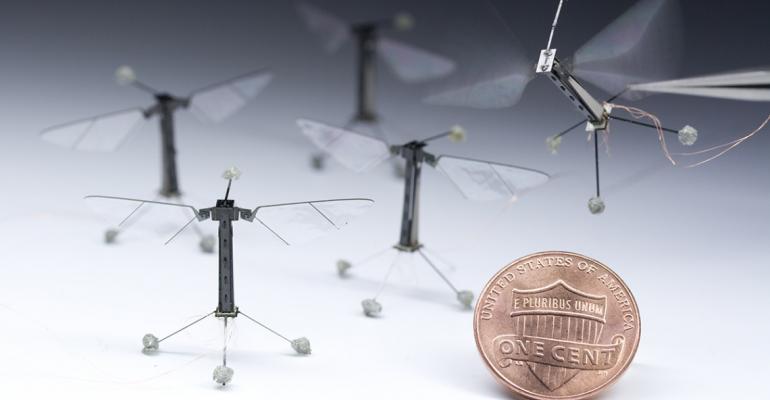
In this episode, Kate Zhou interviews Farrell Helbling, postdoctoral fellow at Harvard Microrobotics lab, who has worked on developing the RoboBee, an insect-inspired robot that is the lightest vehicle to achieve untethered flight. Farrell discusses challenges with building the robot at centimeter-scale as well as integration of sensors and power electronics particularly in considerations with weight trade-offs.
Farrell Helbling

Farrell Helbling is a post doctoral fellow at Harvard University, where she focuses on the systems-level design of the Harvard RoboBee, an insect-scale flapping wing robot. Her research looks at the integration of the control system, sensors, and power electronics within the strict weight and power constraints of the vehicle. Her work led to the first untethered flight of an insect scale vehicle and was recently featured on the cover of Nature. She is the recipient of a NSF Graduate Research Fellowship, a 2018 Rising Star in EECS, and co-author on the IROS 2015 Best Student Paper for an insect-scale, hybrid aerial-aquatic vehicle. Her work on the RoboBee project is also featured at the Boston Museum of Science, World Economic Forum, London Science Museum, and the Smithsonian, as well as in the popular press (PBS NewsHour, The New York Times, Science Friday, BBC, and Wired). She is interested in the codesign of mechanical and electrical systems for mass-, power-, and computation-constrained robots.
Links
* Please register at:
https://robotsinsurgeryandhealthcare.eventbrite.com
The COVID-19 pandemic is increasing global demand for robots that can
assist in surgery and healthcare. This symposium focuses on recent
advances and open problems in robot-assisted tele-surgery and
tele-medicine and needs for new research and development. The online
format will encourage active dialogue among faculty, students,
professionals, and entrepreneurs.
Featuring:
Gary Guthart, CEO, Intuitive Surgical
Robin Murphy, Texas A&M
Pablo Garcia Kilroy, VP Research, Verb Surgical
Allison Okamura, Professor Stanford
David Noonan, Director of Research, Auris Surgical
Jaydev Desai, Director, Georgia Tech Center for Medical Robotics
Nicole Kernbaum, Principal Engineer, Seismic Powered Clothin
Monroe Kennedy III, Professor, Stanford
Presented by the University of California Center for Information
Technology Research in the Interest of Society (CITRIS) and the Banatao
Institute “People and Robots” Initiative, SRI International, and
Silicon Valley Robotics.
Schedule:
* 09:30-10:00: Conversation with Robin Murphy, Texas A&M and Director of
Robotics for Infectious Diseases, and Andra Keay, Director of Silicon
Valley Robotics
* 10:00-10:30: Conversation with Gary Guthart, CEO Intuitive Surgical
and Ken Goldberg, Director of CITRIS People and Robots Initiative
* 10:30-11:00: Conversation with Pablo Garcia Kilroy, VP Research
Verb Surgical and Tom Low, Director of Robotics at SRI International
* 11:00-11:15: Coffee Break
* 11:15-11:45: Conversation with David Noonan, Director of Research,
Auris Surgical and Nicole Kernbaum
* 11:45-12:45: Keynote by Jaydev Desai, Director, Georgia Tech Center
for Medical Robotics
* 12:45-01:15: Conversation with Allison Okamura, Stanford and Monroe
Kennedy III, Stanford