By Kees Lokhorst, Project Coordinator of the agROBOfood project
During the last decades robots are transforming from simple machines to cognitive collaborators. The distance that has been covered is long, but there are still challenges, as well as opportunities that lie ahead. That was also the main topic of discussion in the agROBOfood event ‘Visioning the future of agri-food robotics’ by a panel of experts of the domain.
The topic was introduced by two inspiring presentations. The first one was by Jérôme Bandry, who shared the vision of CEMA (European Agricultural Machinery). According to their insights digitalization, precision agriculture and robotics will be part or even drive the re-shape of agricultural systems that address the societal challenges. Industrial leadership will be needed to address challenges on investments in the data infrastructure, legislation, and skills development. However, the biggest challenge is to bridge the gap between the development of innovative robotic solutions and the successful uptake of these solutions in practice.
The second one by Dr. Slawomir Sander, Chair of the EU-Robotics AISBL topic group on agriculture robotics showcased the opportunities and challenges for the community involved in the European Robotics for the agri-food production. Those are available in the strategic agenda that was developed by EU-Robotics along with agROBOfood, an H2020 project that aims to build a pan-European network of Digital Innovation Hubs in the agri-food sector. The purpose of this strategic agenda was to contribute to the development of the European Strategic Research and Innovation and Deployment Agenda (SRIDA) of the AI, Data and Robotics PPP, a broad and coherent view of the needs, applications, key challenges for robotics for the agri-food production domain in combination with data and AI, a 360o stakeholder view addressing technology, business, and ecosystem development, and a basis for the vision, alignment, and development of programs, projects, groups, and consortia that aim to contribute to the development and deployment of robotics, AI, and data in the agri-food production network.
The agenda’s vision is well encapsulated in the following sentence: “Future agri-food production networks will be flexible, responsive, and transparent, providing sufficient high-quality and healthy products and services for everyone at a reasonable cost while preserving resources, biodiversity, climate, environment, and cultural differences”. The mission’s respectively in the following: “Stimulate the development and integration of innovative robotic, AI, and Data solutions that can successfully be used in flexible, responsive, and transparent agri-food production networks”.
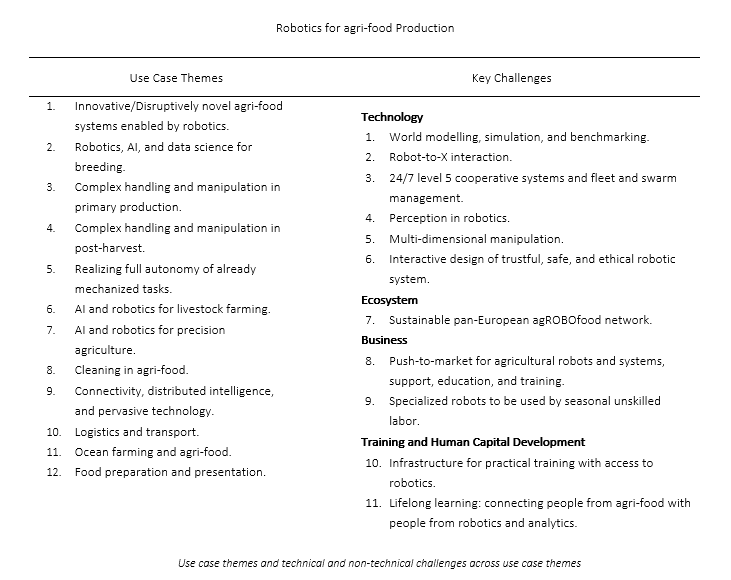
The current release of the agenda mainly focuses on the food production part. Being a working document though it will serve as a basis for further elaboration to encompass the whole agri-food domain in its full width and depth. With an emphasis on robotics and to a lesser extent on AI and Data, it provides a vision and mission on what robotics should contribute and how to facilitate the transition to a more sustainable agri-food production. Key challenges in terms of technology, ecosystem, and market are derived from 12 use-case themes within the agri-food production domain (table).
In case of questions, please contact Kees.lokhorst@wur.nl or visit https://agrobofood.eu/project/ and https://sparc-robotics-portal.eu/web/agriculture/home