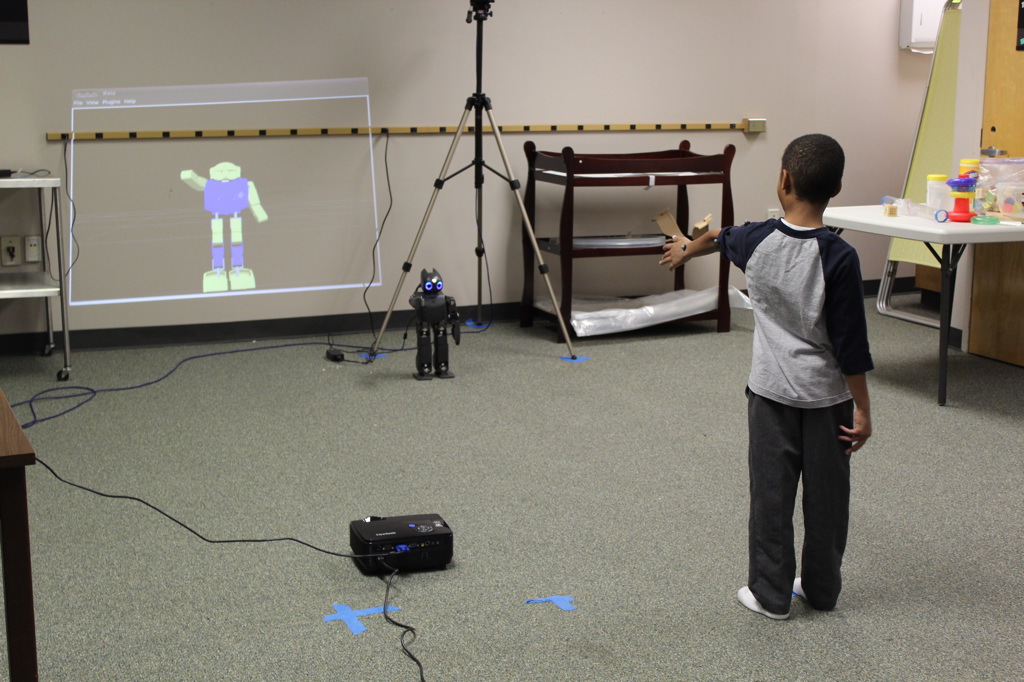
In this episode, Audrow Nash interviews Ayanna Howard, Professor at the Georgia Institute of Technology, about her work to help children with the movement disorder cerebral palsy. Howard discusses how robots and tablet can be used to “gamify” pediatric therapy. The idea is that if therapy is fun and engaging children are more likely to do it, and thus, they are more likely to see the long-term benefits of the therapy. Howard discusses how therapy is “gamified,” how a small humanoid robot is used to coach children, and how they work with pediatricians.
Ayanna Howard

Ayanna Howard, Ph.D. is Professor and Linda J. and Mark C. Smith Endowed Chair in Bioengineering in the School of Electrical and Computer Engineering at the Georgia Institute of Technology. She also holds the position of Associate Chair for Faculty Development in ECE. She received her B.S. in Engineering from Brown University, her M.S.E.E. from the University of Southern California, and her Ph.D. in Electrical Engineering from the University of Southern California.
Her area of research is centered around the concept of humanized intelligence, the process of embedding human cognitive capability into the control path of autonomous systems. This work, which addresses issues of autonomous control as well as aspects of interaction with humans and the surrounding environment, has resulted in over 200 peer-reviewed publications in a number of projects – from scientific rover navigation in glacier environments to assistive robots for the home. To date, her unique accomplishments have been highlighted through a number of awards and articles, including highlights in USA Today, Upscale, and TIME Magazine, as well as being named a MIT Technology Review top young innovator and recognized as one of the 23 most powerful women engineers in the world by Business Insider.
In 2013, she also founded Zyrobotics, which is currently licensing technology derived from her research and has released their first suite of therapy and educational products for children with differing needs. From 1993-2005, Dr. Howard was at NASA’s Jet Propulsion Laboratory, California Institute of Technology. She has also served a term as the Associate Director of Research for the Georgia Tech Institute for Robotics and Intelligent Machines and a term as Chair of the multidisciplinary Robotics Ph.D. program at Georgia Tech.
Links


 Chris Gerdes is a Professor of Mechanical Engineering at Stanford University, Director of the Center for Automotive Research at Stanford (CARS) and Director of the Revs Program at Stanford. His laboratory studies how cars move, how humans drive cars and how to design future cars that work cooperatively with the driver or drive themselves. When not teaching on campus, he can often be found at the racetrack with students, instrumenting historic race cars or trying out their latest prototypes for the future. Vehicles in the lab include X1, an entirely student-built test vehicle, and Shelley, an Audi TT-S capable of turning a competitive lap time around the track without a human driver. Professor Gerdes and his team have been recognized with a number of awards including the Presidential Early Career Award for Scientists and Engineers, the Ralph Teetor award from SAE International and the Rudolf Kalman Award from the American Society of Mechanical Engineers.
Chris Gerdes is a Professor of Mechanical Engineering at Stanford University, Director of the Center for Automotive Research at Stanford (CARS) and Director of the Revs Program at Stanford. His laboratory studies how cars move, how humans drive cars and how to design future cars that work cooperatively with the driver or drive themselves. When not teaching on campus, he can often be found at the racetrack with students, instrumenting historic race cars or trying out their latest prototypes for the future. Vehicles in the lab include X1, an entirely student-built test vehicle, and Shelley, an Audi TT-S capable of turning a competitive lap time around the track without a human driver. Professor Gerdes and his team have been recognized with a number of awards including the Presidential Early Career Award for Scientists and Engineers, the Ralph Teetor award from SAE International and the Rudolf Kalman Award from the American Society of Mechanical Engineers.
 Katsu received his PhD in mechanical engineering from University of Tokyo in 2002. Following postdoctoral work at Carnegie Mellon University from 2002 to 2003, he was a faculty member at University of Tokyo until he joined Disney Research, Pittsburgh, in October 2008. His main research area is humanoid robot control and motion synthesis, in particular methods involving human motion data and dynamic balancing. He is also interested in developing algorithms for creating character animation. He has always been fascinated by the way humans control their bodies, which led him to the research on biomechanical human modeling and simulation to understand human sensation and motor control.
Katsu received his PhD in mechanical engineering from University of Tokyo in 2002. Following postdoctoral work at Carnegie Mellon University from 2002 to 2003, he was a faculty member at University of Tokyo until he joined Disney Research, Pittsburgh, in October 2008. His main research area is humanoid robot control and motion synthesis, in particular methods involving human motion data and dynamic balancing. He is also interested in developing algorithms for creating character animation. He has always been fascinated by the way humans control their bodies, which led him to the research on biomechanical human modeling and simulation to understand human sensation and motor control.
 Peter Corke is Professor of Robotics and Control at the Queensland University of Technology leading the ARC Centre of Excellence for Robotic Vision in Australia. Previously he was a Senior Principal Research Scientist at the CSIRO ICT Centre where he founded and led the Autonomous Systems laboratory, the Sensors and Sensor Networks research theme and the Sensors and Sensor Networks Transformational Capability Platform. He is a Fellow of the IEEE. He was the Editor-in-Chief of the IEEE Robotics and Automation magazine; founding editor of the Journal of Field Robotics; member of the editorial board of the International Journal of Robotics Research, and the Springer STAR series. He has over 300 publications in the field and has held visiting positions at the University of Pennsylvania, University of Illinois at Urbana-Champaign, Carnegie-Mellon University Robotics Institute, and Oxford University.
Peter Corke is Professor of Robotics and Control at the Queensland University of Technology leading the ARC Centre of Excellence for Robotic Vision in Australia. Previously he was a Senior Principal Research Scientist at the CSIRO ICT Centre where he founded and led the Autonomous Systems laboratory, the Sensors and Sensor Networks research theme and the Sensors and Sensor Networks Transformational Capability Platform. He is a Fellow of the IEEE. He was the Editor-in-Chief of the IEEE Robotics and Automation magazine; founding editor of the Journal of Field Robotics; member of the editorial board of the International Journal of Robotics Research, and the Springer STAR series. He has over 300 publications in the field and has held visiting positions at the University of Pennsylvania, University of Illinois at Urbana-Champaign, Carnegie-Mellon University Robotics Institute, and Oxford University.
 Sergey Levine is an assistant professor at UC Berkeley. His research focuses on robotics and machine learning. In his PhD thesis, he developed a novel guided policy search algorithm for learning complex neural network control policies, which was later applied to enable a range of robotic tasks, including end-to-end training of policies for perception and control. He has also developed algorithms for learning from demonstration, inverse reinforcement learning, efficient training of stochastic neural networks, computer vision, and data-driven character animation.
Sergey Levine is an assistant professor at UC Berkeley. His research focuses on robotics and machine learning. In his PhD thesis, he developed a novel guided policy search algorithm for learning complex neural network control policies, which was later applied to enable a range of robotic tasks, including end-to-end training of policies for perception and control. He has also developed algorithms for learning from demonstration, inverse reinforcement learning, efficient training of stochastic neural networks, computer vision, and data-driven character animation.
 Dr. Bradley Knox is the founder of bots_alive. He researched human-robot interaction, interactive machine learning, and artificial intelligence at the MIT Media Lab and at UT Austin. At MIT, he designed and taught Interactive Machine Learning. He has won two best paper awards at major robotics and AI conferences, was awarded best dissertation from UT Austin’s Computer Science Department, and was named to IEEE’s AI’s 10 to Watch in 2013.
Dr. Bradley Knox is the founder of bots_alive. He researched human-robot interaction, interactive machine learning, and artificial intelligence at the MIT Media Lab and at UT Austin. At MIT, he designed and taught Interactive Machine Learning. He has won two best paper awards at major robotics and AI conferences, was awarded best dissertation from UT Austin’s Computer Science Department, and was named to IEEE’s AI’s 10 to Watch in 2013.