To celebrate Women’s Day 2021 and the 50th anniversary of women’s right to vote in Switzerland, the Swiss NCCRs (National Centres of Competence in Research) wanted to show you who our women researchers are and what a day in their job looks like. The videos are targeted at women and girls of school and undergraduate age to show what day to day life as a scientist is like and make it more accessible. Each NCCR hosted a week where they published several videos covering multiple scientific disciplines, and here we are bringing you what was produced by NCCR Digital Fabrication.
The videos cover a wide range of subjects, including (but not limited to) maths, physics, microbiology, psychology and planetary science, but here we have two women who work with robots.
Maria Vittoria Minniti is a robotics engineer and PhD student, she enhances mobile manipulation capabilities in under-actuated robots.
Inés Ariza is an architect, she uses a robot to 3D print custom metal joints for complex structures.
Head over to YouTube or Instagram (English, German or French) to see the women featured in the #NCCRWomen campaign.
The installation Concrete Choreography presents the first robotically 3D printed concrete stage, consisting of columns fabricated without formwork and printed in full height within 2.5 hours. Robotic concrete printing allows customised fabrication of complex components that uses concrete more efficiently.
In collaboration with the Origen Festival in Riom, Switzerland, the installation consists of 9, 2.7m columns, individually designed with custom software and fabricated with a new robotic concrete 3D printing process developed at ETH Zurich. Students of the Master of Advanced Studies in Digital Fabrication and Architecture explore the unique possibilities of 3D printing with an age-old material, demonstrating the potential of computational design and digital fabrication for future construction.
This novel fabrication process allows the production of concrete elements without the need for any formwork. In addition, one-of-a-kind designs with complex geometries can be fabricated in a fully automated manner. Hollow concrete structures are printed in a way where the material can be strategically used only where needed, allowing a more sustainable approach to concrete architecture.
Computationally designed material ornament and surface texture exemplify the versatility and significant aesthetic potential of 3D concrete printing when used in large-scale structures.
Framing and informing the dance performances of the summer season in Riom, the project demonstrates how technological advancements can bring efficient and novel expressions to concrete architecture.
One column in numbers:
Column Height: 2.70 m
Print-path length: 1600 m
Print-time: 2.5 h
Print-speed: 180 mm/sec
Layer width: 25 mm
Layer height: 5 mm
Project Credits
Digital Building Technologies, ETH Zurich Prof. Benjamin Dillenburger
MAS DFAB in Architecture and Digital Fabrication | ETH Zurich
Teaching Team Ana Anton, Patrick Bedarf, Angela Yoo (Digital Building Technologies), Timothy Wangler (Physical Chemistry of Building Materials)
Students Antonio Barney, Aya Shaker Ali, Chaoyu Du, Eleni Skevaki, Jonas Van den Bulcke, Keerthana Udaykumar, Nicolas Feihl, Nik Eftekhar Olivo, Noor Khader, Rahul Girish, Sofia Michopoulou, Ying-Shiuan Chen, Yoana Taseva, Yuta Akizuki, Wenqian Yang
Origen Foundation Giovanni Netzer, Irene Gazzillo, Guido Luzio, Flavia Kistler
Research Partners Prof. Robert J. Flatt, Lex Reiter, Timothy Wangler (Physical Chemistry of Building Materials, ETH Zurich)
Technical Support Michael Lyrenmann, Philippe Fleischmann, Andreas Reusser, Heinz Richner
Supported by Debrunner Acifer Bewehrungen AG, LafargeHolcim, Elotex, Imerys Aluminates
The concrete Choreography project was recently featured on SRF’s Kulturplatz programme, and you can catch up with it online (in German). The project is also featured in Zurich’s Museum für Gestaltung as part of the Designlabor: Material und Technik exhibition.
To celebrate the installation of the concrete façade mullions digitally fabricated using Smart Dynamic Casting in the DFAB House, we have released a new extended video showing the entire process from start to finish.
Smart Dynamic Casting (SDC) is a continuous robotic slip-forming process that enables the prefabrication of material-optimised load-bearing concrete structures using a formwork significantly smaller than the structure produced. Read more about the project on the DFAB House website.
Smart Dynamic Casting is a collaborative research project of Gramazio Kohler Research, ETH Zurich, the Institute for Building Materials, ETH Zurich and the Institute of Structural Engineering, ETH Zurich. As part of the DFAB HOUSE project at the Empa and Eawag NEST research and innovation construction site in Dübendorf Smart Dynamic Casting is used for the automated prefabrication of material-optimised load-bearing concrete mullions.
After the successful completion of the production of the material-optimised concrete façade mullions, Fabio Scotto and Ena Lloret-Frischti of the Gramazio Kohler Research Group at ETH Zurich and the Chair for Physical Chemistry of Building Materials, ETH Zurich take a look back at the experiments and prototypes which were necessary in the development of a final robotic fabrication process.
The integration of Smart Dynamic Casting (SDC) for the production of the façade mullions for the first floor of DFAB HOUSE has led us to the development of an adaptive robotic setup which allows us to produce custom-made reinforced concrete structures. Until the final development of a robust robotic process, we had to overcome several challenges during the experimental and prototypical phase.
Scaling down the production system and minimizing the friction forces
Our first main task was to scale down the production system to realise structures with a minimal cross section of 100×70 mm. This had a direct impact on the formwork system we were working with previously. We observed an increase in friction forces that resulted in accumulations of concrete along the inside walls of the formwork. This caused major issues during the casting process, specifically surface disruptions and, in some cases, a complete flow out of the fresh concrete.
To minimize the effects of the friction forces, we have defined strategies to optimize the overall process. Firstly, we engineered a much more self-compacting concrete mix with greater flowability and optimised setting times. Secondly, the formwork material was changed to stainless steel. Together with our capillary oiling concept, this ensures a significantly more frictionless casting process.
Integration of the reinforcement
Another issue we had to overcome in the research process was the integration of the reinforcement system. Although the mullions for DFAB HOUSE are not load-bearing, their structural performance is optimized for wind and self-weight load.
We developed a non-standard reinforcement system constrained within the small cross sections of the mullions. Two 12mm radius stainless steel bars, previously bent into the desired shape through CNC processes, are welded together through horizontal connection elements. The reinforcement is placed inside the formwork prior to initiating the fabrication process and fixed to lower and upper attachments. Due to the slender geometries of the mullions, the reinforcement had the tendency of bending under the effect of its own weight and the attachment system has been reviewed to avoid any deflection during the concrete casting. We devised a pulley system that allows us to fix the reinforcement in place by applying tension. In doing so, we ensure the reinforcement is held straight throughout the whole production, minimizing deflections along the entire height of the mullion.
A successful development process
After numerous experiments and prototypes, we have successfully overcome all the challenges that arose in the process and finalised an optimised fabrication procedure. The SDC mullions produced for the DFAB HOUSE display great surface quality while fulfilling the required structural criteria.
At Spatial Timber Assemblies, man and machine work together in both the planning and the manufacturing process. (Photograph: NFS Digital Fabrication / Roman Keller)
NCCR Researchers are using a new method for digital timber construction in a real project for the first time. The load-bearing timber modules, which are prefabricated by robots, will be assembled on the top two floors at the DFAB HOUSE construction site.
Digitalisation has found its way into timber construction, with entire elements already being fabricated by computer-aided systems. The raw material is cut to size by the machines, but in most cases it still has to be manually assembled to create a plane frame. In the past, this fabrication process came with many geometric restrictions.
Under the auspices of the National Centre of Competence in Research (NCCR) Digital Fabrication, researchers from ETH Zurich’s Chair of Architecture and Digital Fabrication have developed a new, digital timber construction method that expands the range of possibilities for traditional timber frame construction by enabling the efficient construction and assembly of geometrically complex timber modules. Spatial Timber Assemblies evolved from a close collaboration with Erne AG Holzbau and will be used for the first time in the DFAB HOUSE project at the Empa and Eawag NEST research and innovation construction site in Dübendorf. It is also the first large-scale architectural project to use the construction robots developed by ETH Zurich’s new Robotic Fabrication Laboratory.
With robotic precision
The robot first takes a timber beam and guides it while it is sawed to size. After an automatic tool change, a second robot drills the required holes for connecting the beams. In the final step, the two robots work together and position the beams in the precise spatial arrangement based on the computer layout. To prevent collisions when positioning the individual timber beams, the researchers have developed an algorithm that constantly recalculates the path of motion for the robots according to the current state of construction. Workers then manually bolt the beams together.
Longer lasting, more individual construction
Unlike traditional timber frame construction, Spatial Timber Assemblies can manage without reinforcement plates because the required rigidity and load-bearing result from the geometric structure. Not only does this save material; it also opens up new creative possibilities. A total of six spatial, geometrically unique timber modules will be prefabricated in this way for the first time. Lorries will then transport them to the DFAB HOUSE construction site at the NEST in Dübendorf, where they will be joined to build a two-storey residential unit with more than 100 m2 of floor space. The complex geometry of the timber construction will remain visible behind a transparent membrane façade.
Integrated digital architecture
The robots use information from a computer-aided design model to cut and arrange the timber beams. This method was specially developed during the project and uses various input parameters to create a geometry consisting of 487 timber beams in total.
The fact that Spatial Timber Assemblies is being used for digital fabrication and also in design and planning offers a major advantage according to Matthias Kohler, Professor of Architecture and Digital Fabrication at ETH Zurich and the man spearheading the DFAB HOUSE project: “If any change is made to the project overall, the computer model can be constantly adjusted to meet the new requirements. This kind of integrated digital architecture is closing the gap between design, planning and execution.”
More Information in ETH Zurich Press Release
Detailed information about the building process, quotes as well as image and video material can be found in the extended press release by ETH Zurich.
At the Empa and Eawag NEST building in Dübendorf, eight ETH Zurich professors as part of the Swiss National Centre of Competence in Research (NCCR) Digital Fabrication are collaborating with business partners to build the three-storey DFAB HOUSE. It is the first building in the world to be designed, planned and built using predominantly digital processes.
Robots that build walls and 3D printers that print entire formworks for ceiling slabs – digital fabrication in architecture has developed rapidly in recent years. As part of the National Centre of Competence in Research (NCCR) Digital Fabrication, architects, robotics specialists, material scientists, structural engineers and sustainability experts from ETH Zurich have teamed up with business partners to put several new digital building technologies from the laboratory into practice. Construction is taking place at NEST, the modular research and innovation building that Empa and Eawag built on their campus in Dübendorf to test new building and energy technologies under real conditions. NEST offers a central support structure with three open platforms, where individual construction projects – known as innovation units – can be installed. Construction recently began on the DFAB HOUSE.
Digitally Designed, Planned and Built
The DFAB HOUSE is distinctive in that it was not only digitally designed and planned, but is also built using predominantly digital processes. With this pilot project, the ETH professors want to examine how digital technology can make construction more sustainable and efficient, and increase the design potential. The individual components were digitally coordinated based on the design and are manufactured directly from this data. The conventional planning phase is no longer needed. As of summer 2018, the three-storey building, with a floor space of 200 m2, will serve as a residential and working space for Empa and Eawag guest researchers and partners of NEST.
Four New Building Methods Put to the Test
At the DFAB HOUSE, four construction methods are for the first time being transferred from research to architectural applications. Construction work began with the Mesh Mould technology, which received the Swiss Technology Award at the end of 2016. The result will be a double-curved load-bearing concrete wall that will shape the architecture of the open-plan living and working area on the ground floor. A “Smart Slab” will then be installed – a statistically optimised and functionally integrated ceiling slab, for which the researchers used a large-format 3D sand printer to manufacture the formwork.
Smart Dynamic Casting technology is being used for the façade on the ground floor: the automated robotic slip-forming process can produce tailor-made concrete façade posts. The two upper floors, with individual rooms, are being prefabricated at ETH Zurich’s Robotic Fabrication Laboratory using spatial timber assemblies; cooperating robots will assemble the timber construction elements.
More Information in ETH Zurich Press Release and on Project Website
Detailed information about the building process, quotes as well as image and video material can be found in the extended press release by ETH Zurich. In addition, a project website for the DFAB HOUSE is currently in development and will soon be available at the following link: www.dfabhouse.ch. Until then, Empa’s website offers information about the project: https://www.empa.ch/web/nest/digital-fabrication
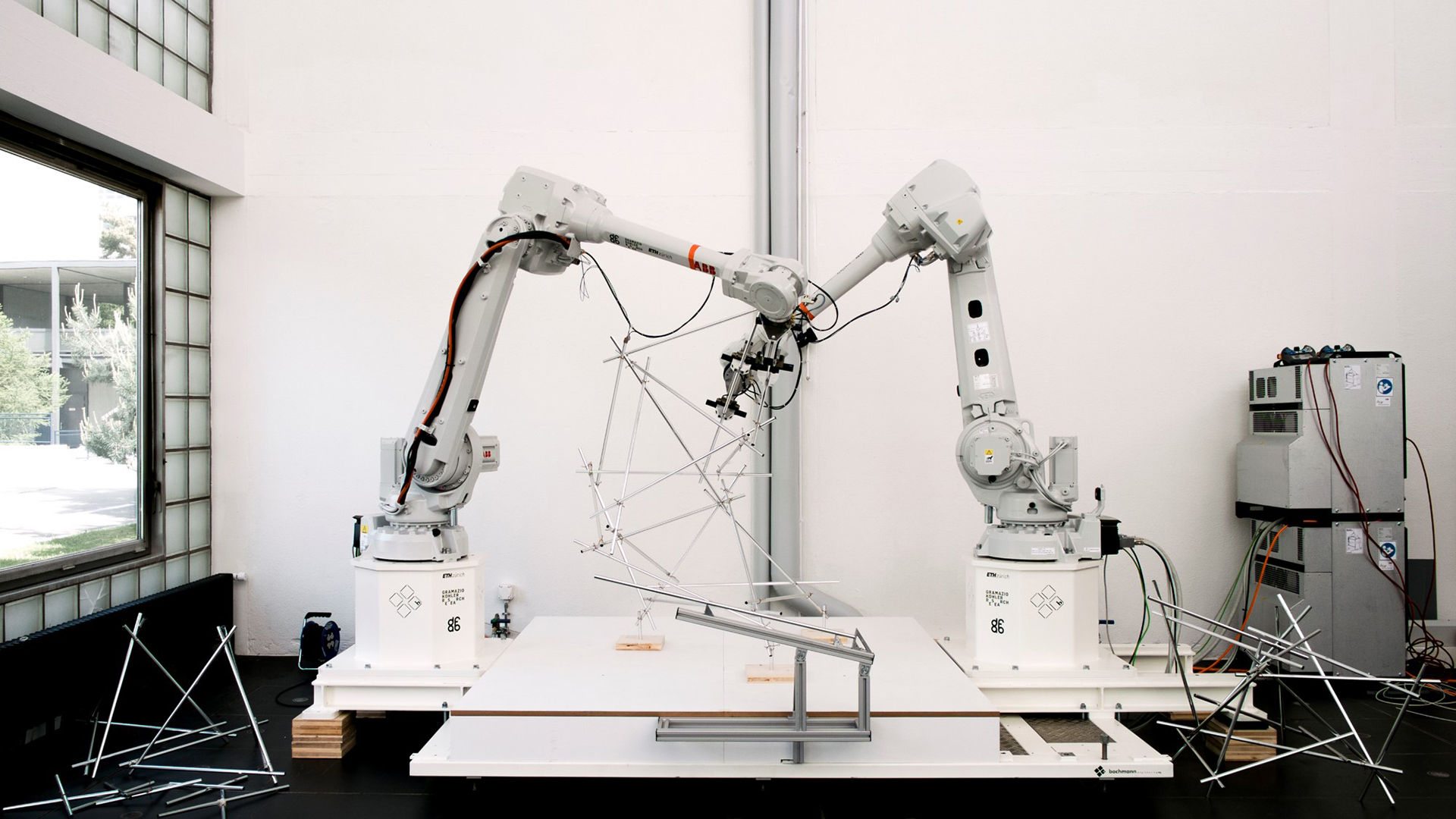
Figure 1: Multi-robotic assembly of spatial discrete elements structures. Source: NCCR Digital Fabrication.
Multi-robotic fabrication methods can strongly increase the potential of robotic fabrication for architectural applications through the definition of cooperative assembly tasks. As such, the objective of this research is to investigate and develop methods and techniques for the multi-robotic assembly of discrete elements into geometrically complex space frame structures.
This endeavour implies the definition of an integrative digital design method that leads to fabrication and structure informed assemblies that can be automatically built up into custom configurations. The research is being conducted at Gramazio Kohler Research as part of the interdisciplinary research program of the Swiss National Centre of Competence in Research (NCCR) Digital Fabrication. It started in September 2014 by Stefana Parascho and currently includes collaborations with Augusto Gandía and Thomas Kohlhammer.
Spatial Structures
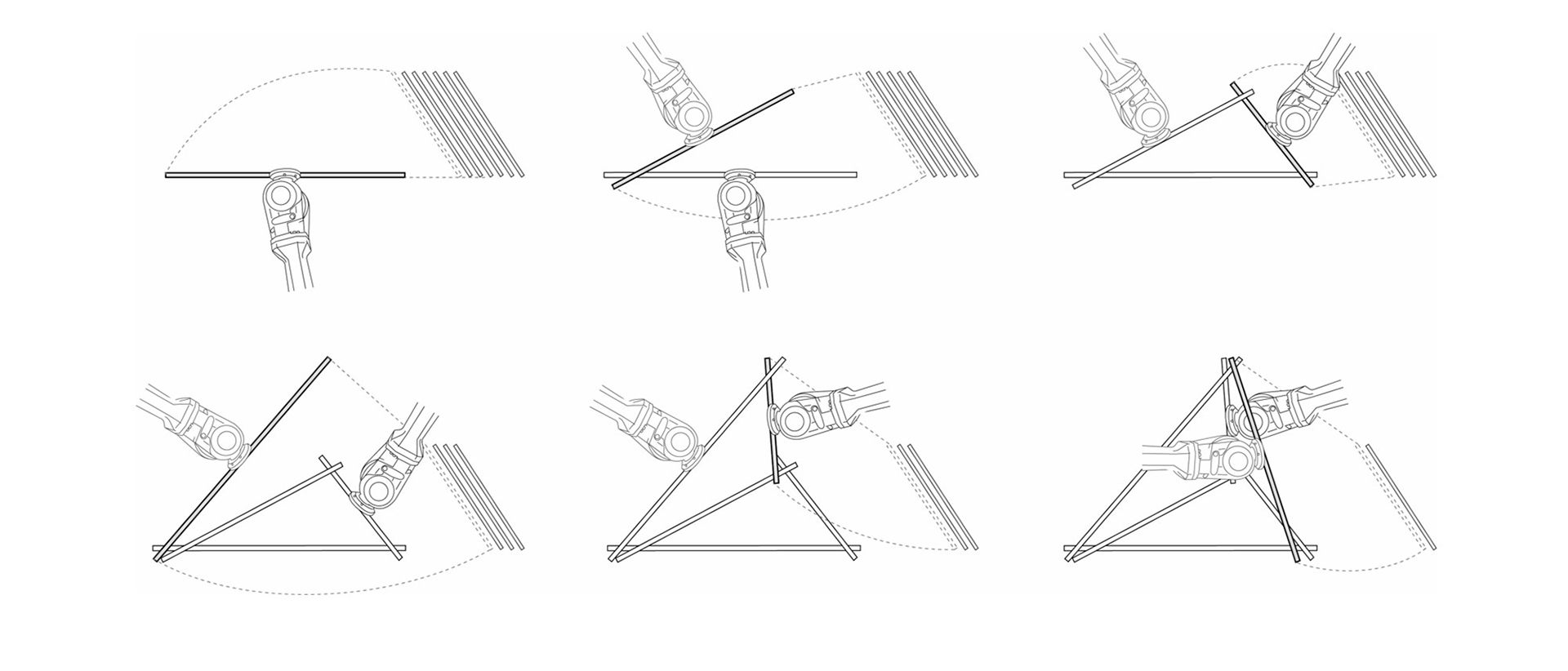
Space frames structures developed during the industrial revolution as efficient systems for large-span constructions, but quickly reached a limitation of their variability through the necessity of standardisation as well as complex connection detailing. Through the development of a multi-robotic assembly method as well as an integrated joining system, irregular space frame geometries become buildable, enhancing existing typologies through their potential for variability and efficient material use. The use of robotic fabrication techniques and the avoidance of pre-fabricated, rigid connections lead to a system that relies not only on digital planning and manufacturing but includes digital assembly as an addition to the digital chain. A process of robotic build-up of triangulated structures was developed, based on the alternating placement of rods. This way, one robot always serves as a support for the already built structure while the other assembles a new element (Figure 02). As a result, the built structures do not require any additional support structures and are constantly stabilised by the robots.
Figure 2: Conceptual Diagram of multi-robotic assembly strategy, exemplified through the sequential build-up of a spatial triangulated structure. Two robots are alternating in order to position the elements and at the same time serve as support structure. Source: NCCR Digital Fabrication.
Integrative Design Methods
Traditional architectural design methods commonly follow a top-down strategy in which both construction and fabrication are subordinated to a previously predefined geometry. In an integrative design approach, the fabrication, structural performance and given boundary constraints can simultaneously function as design drivers, allowing for a much higher flexibility and performance of the system. As such, the presented research focuses on the development of a design strategy in which various factors, such as constraints and characteristics of the multi-robotic fabrication process, are included in the geometric definition process of the structures.
Multi-robotic fabrication
The use of multiple robots for the assembly of discrete element structures opens up potentials for the build-up of complex, stable, three-dimensional constructions. At the same time, the process introduces various challenges such as the necessity for collision avoidance strategies between multiple robots and respective robotic path planning. In order to generate buildable structures, the design process needs to integrate the robots’ constraints, such as robot reach and kinematic behaviour, and at the same time process data from robotic simulation in order to foresee the robots’ precise movements. Through the collaboration with Augusto Gandía from Gramazio Kohler Research a strategy for implementing robotic simulation into a CAD environment and for generating collision free trajectories for multi-robotic applications was developed.
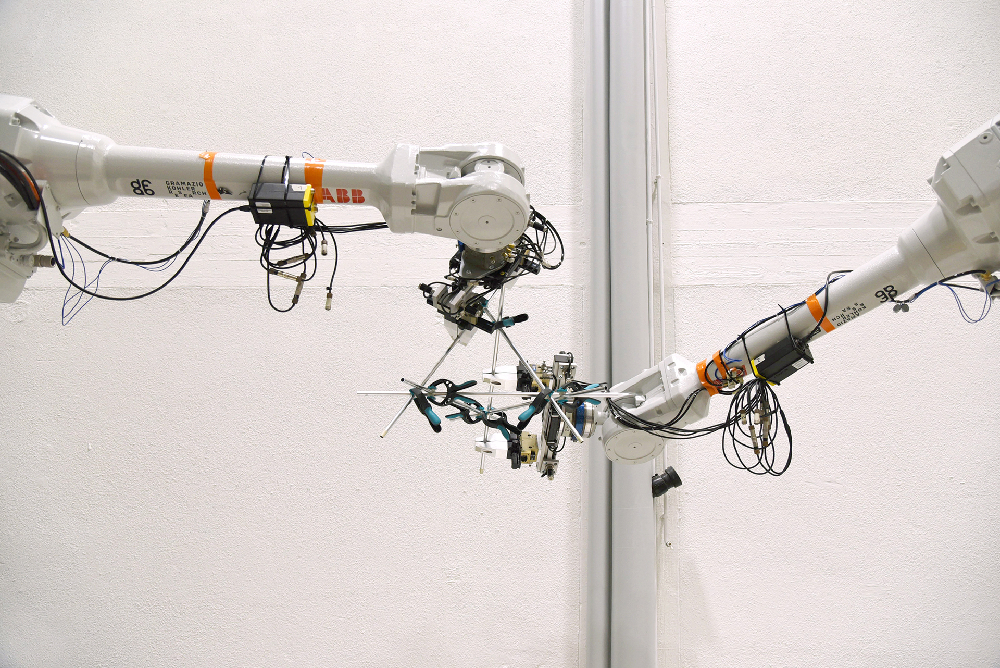
Figure 3: Mid-air build-up of tetrahedral structure without the use of any additional support structure. Source: NCCR Digital Fabrication.
If you liked this article, you may also be interested in:



 After the successful completion of the production of the material-optimised concrete façade mullions,
After the successful completion of the production of the material-optimised concrete façade mullions,