Understanding the faulty proteins linked to cancer and autism
Helping uncover how protein mutations cause diseases and disorders
In the future, we imagine that teams of robots will explore and develop the surface of nearby planets, moons and asteroids – taking samples, building structures, deploying instruments. Hundreds of bright research minds are busy designing such robots. We are interested in another question: how to provide the astronauts the tools to efficiently operate their robot teams on the planetary surface, in a way that doesn’t frustrate or exhaust them?
Received wisdom says that more automation is always better. After all, with automation, the job usually gets done faster, and the more tasks (or sub-tasks) robots can do on their own, the less the workload on the operator. Imagine a robot building a structure or setting up a telescope array, planning and executing tasks by itself, similar to a “factory of the future”, with only sporadic input from an astronaut supervisor orbiting in a spaceship. This is something we tested in the ISS experiment SUPVIS Justin in 2017-18, with astronauts on board the ISS commanding DLR Robotic and Mechatronic Center’s humanoid robot, Rollin’ Justin, in Supervised Autonomy.
However, the unstructured environment and harsh lighting on planetary surfaces makes things difficult for even the best object-detection algorithms. And what happens when things go wrong, or a task needs to be done that was not foreseen by the robot programmers? In a factory on Earth, the supervisor might go down to the shop floor to set things right – an expensive and dangerous trip if you are an astronaut!
The next best thing is to operate the robot as an avatar of yourself on the planet surface – seeing what it sees, feeling what it feels. Immersing yourself in the robot’s environment, you can command the robot to do exactly what you want – subject to its physical capabilities.

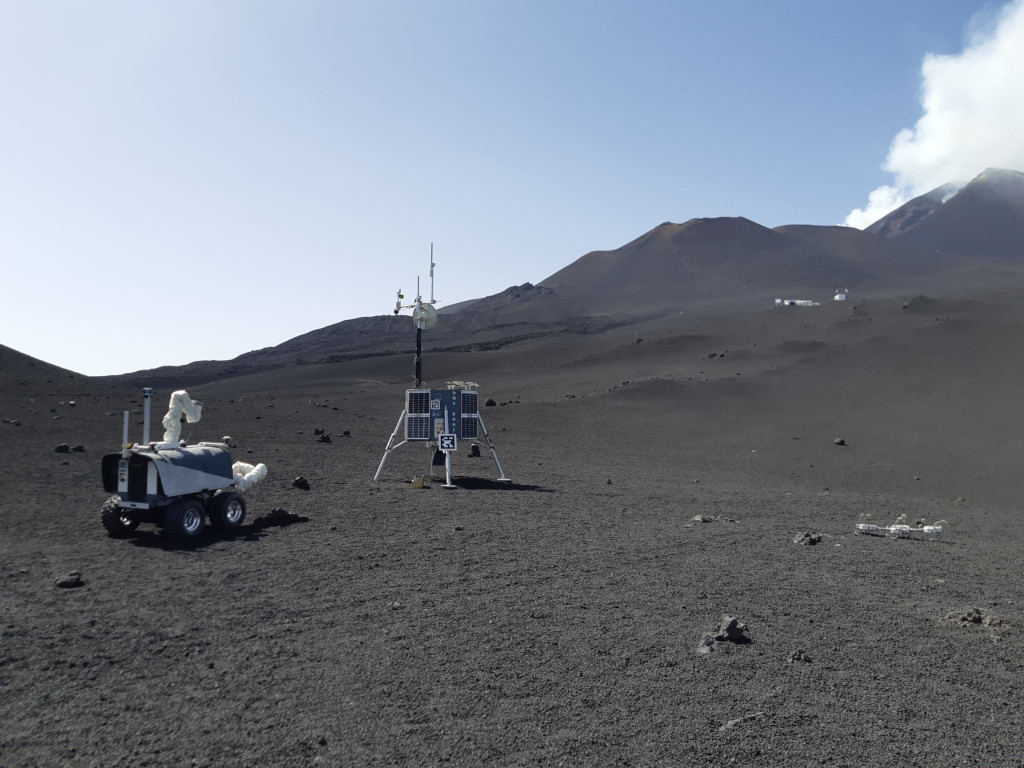
In 2019, we tested this in our next ISS experiment, ANALOG-1, with the Interact Rover from ESA’s Human Robot Interaction Lab. This is an all-wheel-drive platform with two robot arms, both equipped with cameras and one fitted with a gripper and force-torque sensor, as well as numerous other sensors.
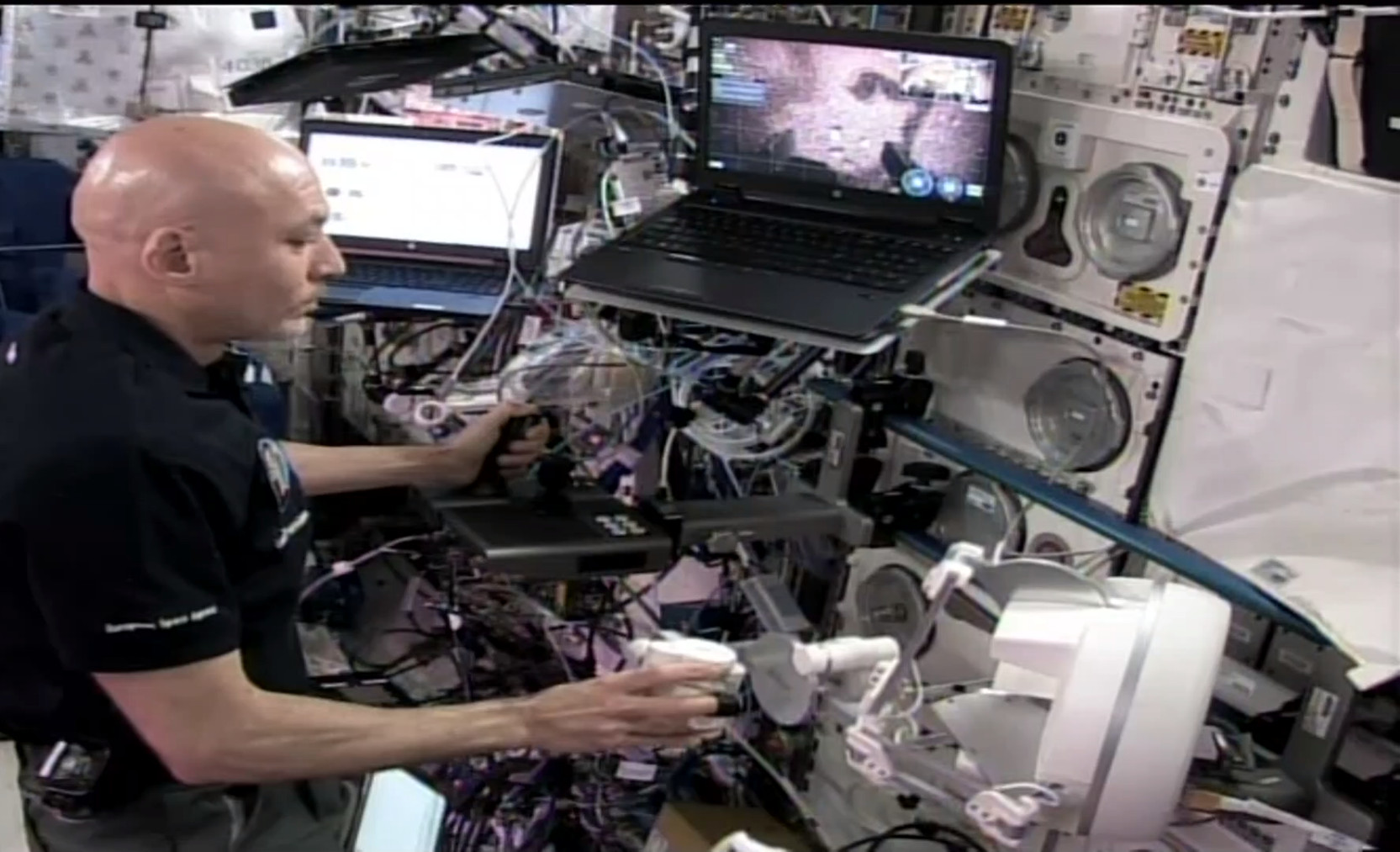
On a laptop screen on the ISS, the astronaut – Luca Parmitano – saw the views from the robot’s cameras, and could move one camera and drive the platform with a custom-built joystick. The manipulator arm was controlled with the sigma.7 force-feedback device: the astronaut strapped his hand to it, and could move the robot arm and open its gripper by moving and opening his own hand. He could also feel the forces from touching the ground or the rock samples – crucial to help him understand the situation, since the low bandwidth to the ISS limited the quality of the video feed.
There were other challenges. Over such large distances, delays of up to a second are typical, which mean that traditional teleoperation with force-feedback might have become unstable. Furthermore, the time delay the robot between making contact with the environment and the astronaut feeling it can lead to dangerous motions which can damage the robot.
To help with this we developed a control method: the Time Domain Passivity Approach for High Delays (TDPA-HD). It monitors the amount of energy that the operator puts in (i.e. force multiplied by velocity integrated over time), and sends that value along with the velocity command. On the robot side, it measures the force that the robot is exerting, and reduces the velocity so that it doesn’t transfer more energy to the environment than the operator put in.
On the human’s side, it reduces the force-feedback to the operator so that no more energy is transferred to the operator than is measured from the environment. This means that the system stays stable, but also that the operator never accidentally commands the robot to exert more force on the environment than they intend to – keeping both operator and robot safe.
This was the first time that an astronaut had teleoperated a robot from space while feeling force-feedback in all six degrees of freedom (three rotational, three translational). The astronaut did all the sampling tasks assigned to him – while we could gather valuable data to validate our method, and publish it in Science Robotics. We also reported our findings on the astronaut’s experience.
Some things were still lacking. The experiment was conducted in a hangar on an old Dutch air base – not really representative of a planet surface.
Also, the astronaut asked if the robot could do more on its own – in contrast to SUPVIS Justin, when the astronauts sometimes found the Supervised Autonomy interface limiting and wished for more immersion. What if the operator could choose the level of robot autonomy appropriate to the task?
In June and July 2022, we joined the DLR’s ARCHES experiment campaign on Mt. Etna. The robot – on a lava field 2,700 metres above sea level – was controlled by former astronaut Thomas Reiter from the control room in the nearby town of Catania. Looking through the robot’s cameras, it wasn’t a great leap of the imagination to imagine yourself on another planet – save for the occasional bumblebee or group of tourists.

This was our first venture into “Scalable Autonomy” – allowing the astronaut to scale up or down the robot’s autonomy, according to the task. In 2019, Luca could only see through the robot’s cameras and drive with a joystick, this time Thomas Reiter had an interactive map, on which he could place markers for the robot to automatically drive to. In 2019, the astronaut could control the robot arm with force feedback; he could now also automatically detect and collect rocks with help from a Mask R-CNN (region-based convolutional neural network).
We learned a lot from testing our system in a realistic environment. Not least, that the assumption that more automation means a lower astronaut workload is not always true. While the astronaut used the automated rock-picking a lot, he warmed less to the automated navigation – indicating that it was more effort than driving with the joystick. We suspect that a lot more factors come into play, including how much the astronaut trusts the automated system, how well it works, and the feedback that the astronaut gets from it on screen – not to mention the delay. The longer the delay, the more difficult it is to create an immersive experience (think of online video games with lots of lag) and therefore the more attractive autonomy becomes.
What are the next steps? We want to test a truly scalable-autonomy, multi-robot scenario. We are working towards this in the project Surface Avatar – in a large-scale Mars-analog environment, astronauts on the ISS will command a team of four robots on ground. After two preliminary tests with astronauts Samantha Christoforetti and Jessica Watkins in 2022, the first big experiment is planned for 2023.
Here the technical challenges are different. Beyond the formidable engineering challenge of getting four robots to work together with a shared understanding of their world, we also have to try and predict which tasks would be easier for the astronaut with which level of autonomy, when and how she could scale the autonomy up or down, and how to integrate this all into one, intuitive user interface.
The insights we hope to gain from this would be useful not only for space exploration, but for any operator commanding a team of robots at a distance – for maintenance of solar or wind energy parks, for example, or search and rescue missions. A space experiment of this sort and scale will be our most complex ISS telerobotic mission yet – but we are looking forward to this exciting challenge ahead.

Robotics solutions and technologies are rapidly changing society and transforming the way we live and work – with both positive improvements and unforeseen consequences.
In Robotics4EU we wish to ensure that citizens have a say when it comes to these new technologies and how they affect everyday life. Therefore, we have gathered robots which are being developed right now or have just entered the market. We have set these up in a survey style consultation.
By answering the survey, you get the opportunity to have an influence on these robotics solutions, as your answers will be given directly to the companies behind the robots, who will use your feedback in the further development of the robots.
The solutions to give feedback to are various: from a robot that gives throat swabs, to a humanoid that assists medical personnel and even a solution that aims to protect farmers’ crops.

Robots that move about by themselves must be able to adapt to the dynamic and challenging conditions in a supermarket. Hernández Corbato says: “My research focuses on using artificial intelligence to make machines smarter and more reliable by teaching them symbolic knowledge. The goal is to develop robotic ‘brains’ for intelligent robots that can be trusted to work alongside people, because they can explain their decisions.”
A supermarket is typically a place where unexpected things happen all the time. Not only are there thousands of products with different shapes and looks, there are also people walking in and out. How can an independently operating machine handle this safely, efficiently and intelligently? By activating symbolic knowledge that we humans also use, says Hernández. “We recognize a tray with four legs underneath as a symbol: ‘table’. We don’t need a photo for it. When we encode such ‘symbol language’ and make it suitable for robots, they can perform more complex tasks.”

One look with its camera eyes and the robot knows it is facing an object on which plates and cups can be placed. Based on this, it can decide what to do. The acceleration that this produces, should enable robots to perform multiple actions at the same time: navigate, pick up and move objects, and ultimately communicate with people.
For Hernández, the AI for Retail Lab research program of supermarket chain Ahold Delhaize brings together everything that fascinates him about artificial intelligence. Retail requires robots to use a broad diversity of skills: to perceive the environment, navigate around it, manipulate objects or collaborate with humans. For him, it’s all about the question of which algorithms are needed to make a machine respond just as intelligently as a human brain. As a specialist in software for autonomously operating robots, he already won the Amazon Picking Challenge in 2016 with a team from TU Delft. At this occasion a robotic arm placed products from a container in their place on a shelf.
“Retail requires robots to use a broad diversity of skills: to perceive the environment, navigate around it, manipulate objects or collaborate with humans.”
– Carlos Hernández Corbato, researcher
The ‘supermarket robot’ is even more challenging. It requires the leap from a static factory environment to the dynamics of a store. The traditional way, in which robots learn from the data they collect, is too cumbersome for that. The robot would already get stuck in stock management. Programming a customized robot treatment for every orange, bottle, soup can, milk carton or cucumber would be too much work. “We want to inject symbolic knowledge into the robot’s operating system all at once,” says Hernández. “If that knowledge is available, the robot can continuously adapt to his changing environment. For example, by downloading a different hand movement.”
The robot must be able to independently choose a different algorithm if it encounters a problem along the way. So that he can pick up a can that falls from his hands, or change the grip of his hand slightly when picking up an unknown object. The technicians have already set up a test shop where robot ‘Tiago’ can practice with it. In about five years’ time, it should deliver a machine with a mobile base, two arms and two camera eyes, which independently refills supermarket shelves 24 hours a day. And it must be able to do that under all circumstances, day and night.
The latter does not only apply to the supermarket robot. In fact, every robot should have a next generation operating system to better cope with changing circumstances. Hernández Corbato: “Beyond integrating different robot skills, cognitive skills for robots need to enable them to reason about those skills, to understand how they can use them, and what are the consequences of their own actions. In sum, we need to endow robots (or any intelligent autonomous system build) with self-awareness so that we can trust them.”
“We need to endow robots (or any intelligent autonomous system build) with self-awareness so that we can trust them.”
– Carlos Hernández Corbato, researcher
It is the core idea behind the European project Metacontrol for ROS2 systems (MROS) that the Cognitive Robotics department recently completed. The AI technique that Hernández used for this is called the metacontrol method. It describes the properties and skills of the robot in a structured way, so that the robot can use the knowledge to adapt and overcome problems.
As part of this research, he developed multiple prototypes of these next generation robots together with Bosch Corporate Research, Universidad Rey Juan Carlos, Universidad Politecnica de Madrid and IT University in Copenhagen.
Does it perform better than traditional robots? “Yes, he navigated more safely and, thanks to its symbolic knowledge, was able to adapt to the circumstances. When one sensor broke, it switched to another independently,” says Hernández enthusiastically. “That is where we want to go to: a robot with sufficient intelligence to deal with failures.”

The post Shelf-stocking robots with independent movement appeared first on RoboHouse.