ESA drone carries satellite navigation receivers to collect data
ESA's Navigation Laboratory has a new recruit: this drone can carry different types of satellite navigation receivers to collect data for follow-on analysis.

Industrial robotics
By Anastasiia Nestrogaeva (Junior Consultant at the International Projects Team, Civitta)
Robotics4EU is a 3-years-long EU-funded project which advocates for a wider adoption for AI-based robots in 4 sectors: healthcare, inspection and maintenance of infrastructure, agri-food, and agile production. Thus, Robotics4EU raises awareness about non-technological aspects in robotics through delivering a series of workshops to involve the research community, industry representatives and citizens.
The workshop “Robots: Friends and Enemies? Social impact of Robotics in Inspection and Maintenance” which took place on the 26th of January, 2022 tackled the problem of interactions between robots and humans. How to evaluate the real impact of robotics on our society? How to decide if robots are hazardous and may complicate human lives? To what extent does society accept rapidly progressing robotic technologies? All these issues were brought up during the fruitful discussion at the workshop. Around 30 people attended the workshop, with 65% of them belonging to the research community and 10% to industry representatives. About 25% comprised the general public. The participants represented 23 different countries, mostly European ones.
The workshop initiated with the presentation of the project and a brainwriting session at better involvement of participants into discussion, then four speakers shared their expertise with the participants. The first speaker was Roberto Zicari who is an affiliated professor at the Arcada University of Applied Sciences in Helsinki and an adjunct professor at the Seoul National University. Also, Roberto leads a team of international experts who defined an assessment process for Trustworthy AI, called Z-Inspection®. The speaker enlisted 4 main fundamental principles which lie down in the EU Framework: respect for human autonomy, prevention of harm, fairness, and explicability. Also, there are 7 main requirements of the EU towards the trustworthy AI: accountability; societal and environmental well-being; diversity, non-discrimination and fairness; transparency, privacy and data governance, technical robustness and safety.
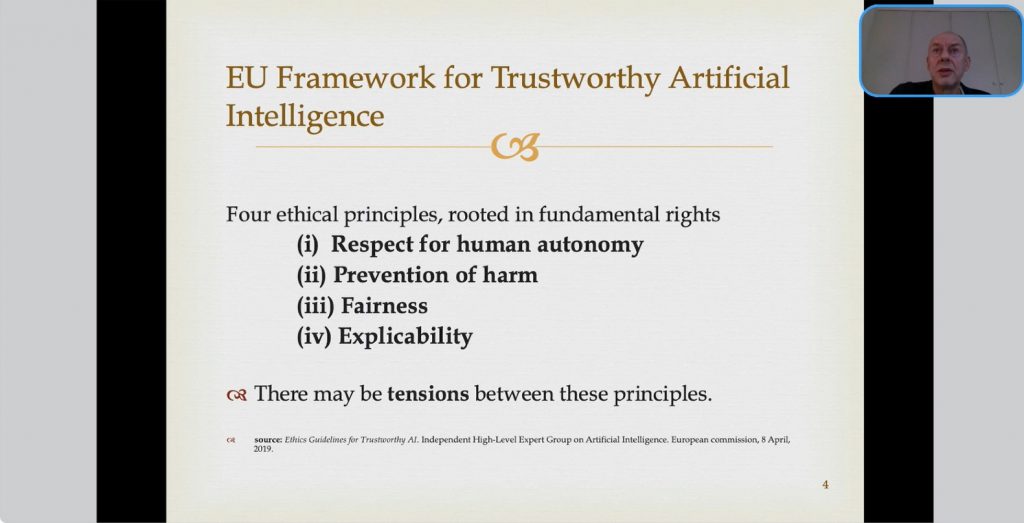
Despite the existing requirements, the EU Framework does not take into account the evolving nature of the technologies and is not contextualised according to various domain peculiarities. That is why, as Roberto stressed, Z-inspection used a holistic approach and created the orchestration process which helps teams of experts access the ethical, legal, technical and domain specific implications for the use of AI products or services. This process can be employed during the whole AI lifecycle and uses socio-technical scenarios to identify issues. Then, the team of experts map to trustworthy AI (onto the ethical categories established by the EU´s Guidelines for Trustworthy AI), execute and resolve (give recommendations to stakeholders).
Second speech was delivered by Maarit Sandelin who works as the European Network Manager in SPRINT Robotics focusing on Robotic Innovation. Maarit explained that SPRINT Robotics is an industry-driven initiative that promotes the development, availability and application of Inspection & Maintenance Robotics around the world. There are 4 focuses which include safety improvement, cost avoidance and reduction, environmental performance improvement, and general performance improvement. Maarit explained that SPRINT Robotics is an industry-driven initiative that promotes the development, availability and application of Inspection & Maintenance Robotics around the world. There are 4 focuses which include safety improvement, cost avoidance and reduction, environmental performance improvement, and general performance improvement.
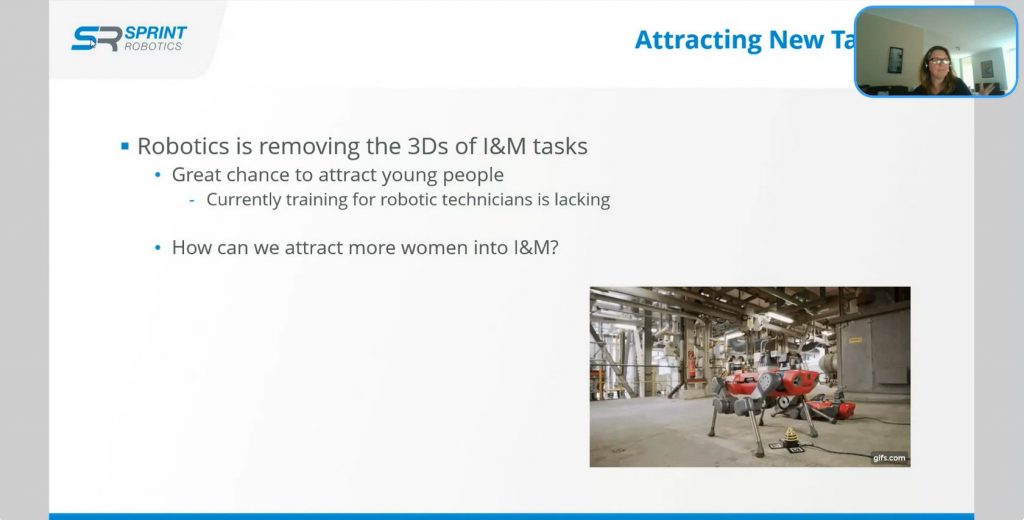
Maarit stressed that COVID-19 definitely has been increasing the interest of business in robotic solutions. A total of 88% of businesses worldwide plan on adopting robotic automation into their infrastructure to increase efficiency and safety. Also, there will be a 12% increase in shipment of robots worldwide and collaborative robots (cobots) will constitute 34% of all robot sales by 2025. The speaker noticed that many dangerous inspection and maintenance activities can be done by robots and efficiency is reached mainly through the preparation stage. However, the main barriers for integrating the robotics solution into operations are regulations. In some countries, the usage of robotics is not allowed by the legislature or its interpretations which, in turn, cause issues for service and technical providers. Maarit strongly believes that the policy changes are needed to contribute to the adoption of robots.
There are also other barriers of a wide-spread adoption. Companies would need to reduce the workforce, to modify the location where a company operates, or even to modify the whole value chain. Also, the skills gaps in the local labour markets is also seen as a potential risk which would require proper training. Talking about displacement of jobs, Maarit stated that it will continue and 85 million jobs will be displaced by 2025, but 97 jobs may appear due to new division of work between humans and machines. Maarit said there is a need to show employees that robotics is not black-and-one, and reskilling may help to save a job.
The second half of the workshop featured the BugWright2 Project which does autonomous robotic inspection and maintenance on ship hulls and storage tanks. Alberto Ortiz Rodrigez, who works as a Professor at University of the Balearic Islands, gave the information about the goals and main activities of the project. The project has the 5-steps approach: multi robot task allocation; mission planning; autonomous inspection; data post processing and actionable data generation; and maintenance which include hull cleaning, augmented reality, defect marking. Alberto showed a few examples of robots which perform different tasks. Lasly, the speaker stressed the importance of the project, enlisting 4 potential impacts. First, it demonstrates how the automated multi-robot technologies can be deployed into a large-scale industrial problem. Second, such technologies lead to cost efficiency: fuel saving, lower service costs, no immobilisation costs. Third, it brings a positive environmental impact, as it makes the ships and tanks safer, contributes to lower fuel consumption and smaller need for antifouling. Lastly, these autonomous inspections are regulated by the World Maritime Organisation (UN).
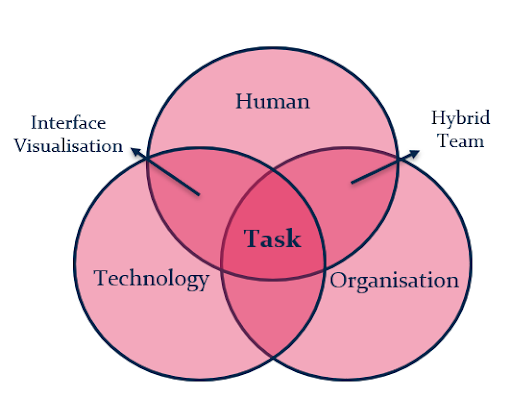
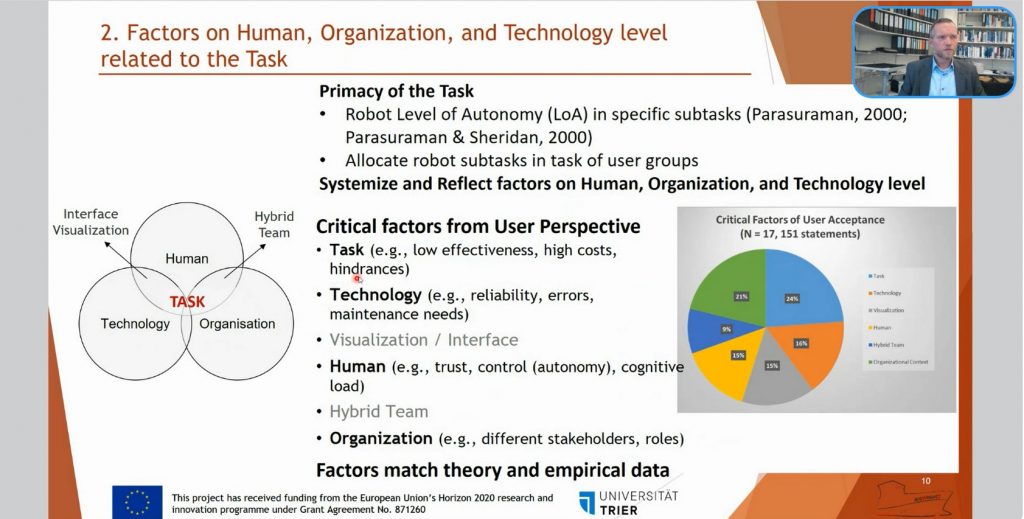
The last speech was delivered by Thomas Ellwart who works as a Professor at the University of Trier. He touched the topic of the interactions between robots and humans. While bringing up the main topic of the workshop “Are robots friends or enemies?”, the speaker noticed that there is a need to define a criteria of terms “friends” and “enemies” or, in other words, criteria of functional / dysfunctional human-robot-interactions (HRC). For psychologists, the main important issue to evaluate among the HRC is a very specific task of employees on the ship. Thomas is convinced that there is a need to reflect abstract models of robotic solutions from on-site user perspective. Talking about criteria of functional HRC, they should:
 However, a high robot autonomy causes some dysfunctional effects of high robot autonomy such as exclusion of humans for safety reasons, reduced possibilities to apply and train skills, responsibilities to react in case of failures or disturbances, and low quality residual tasks. This way, humans are excluded from the task performance, but they are still in charge of system malfunctioning. This way, a high autonomy creates the high interdependence between human tasks and robots – if a robot breaks, a task is under danger, which may postpone the accomplishment of these tasks. Also, Thomas stressed that acceptance is also a double-faced matter: overtrust is as dangerous as mistrust.
However, a high robot autonomy causes some dysfunctional effects of high robot autonomy such as exclusion of humans for safety reasons, reduced possibilities to apply and train skills, responsibilities to react in case of failures or disturbances, and low quality residual tasks. This way, humans are excluded from the task performance, but they are still in charge of system malfunctioning. This way, a high autonomy creates the high interdependence between human tasks and robots – if a robot breaks, a task is under danger, which may postpone the accomplishment of these tasks. Also, Thomas stressed that acceptance is also a double-faced matter: overtrust is as dangerous as mistrust.
To reflect all the criteria, the psychologists look at specific tasks, asking what level of autonomy the robot has and what subtasks it performs. Is it making decisions or just monitoring and implementing action? Thus, from the user perspective, there are critical factors which should be taken into account:
As one the aims of Robotics4EU is to develop the Responsible Robotics Assessment Model, a main coordinator of the project, Anneli Roose, talked about social readiness of robots. Thus, in order to determine this, it is important to figure out to what extent a robot meets a) ethical values, b) socio-economic needs, c) data issues, d) education and management issues, e) legal concerns. It does not cover any legal or regulatory requirements. The foundation to build the Robotics4EU Assessment Model is the Societal Readiness Levels, while the used tools are surveys, interviews, debates, workshops, and stakeholder forums involving the robotics research community, policy makers, and citizens.
Lastly, the workshop finished with the panel discussion which brought up very controversial topics.
How to design a self-assessment model or self-assessment tool in a way it would be valid in 2-3 years. Is it possible or even relevant?
Thomas Ellwart stressed that this is a quite difficult question, as it requires to involve the users and the market. Another matter is whether the automated system will be sustainable and adaptable to the changing environment and reliable over the time which is actually a question to the developers and engineers. Roberto Zicari notices that the Maturity Assessment Model should be domain specific, as a robot assisting the healthcare is very different from the robot replacing mine workers. Thus, it is quite difficult to transfer knowledge obtained in the healthcare sector to the Inspection and Maintenance. He stressed that it would be very interesting to create an interdisciplinary working group focused on several domains and try to assess societal readiness level.
Are the regulatory barriers significant? Are these barriers in the EU regulations or/and national regulations?
Thomas Ellwart states that there are 2 difficult matters: safety and data protection, which come together if we are talking about the regulation on AI. Roberto Zicari mentioned that the EU proposed the first AI Regulation Act, aimed at regulating any AI-based systems and solutions which is based on the risk assessment approach. This proposed act looks at AI mainly as a software, opposite to the classical definition. However, which exact composition of hardware and AI poses high risk and low risk? Thus, Roberto stressed that there is a need for discussions among researchers, law community and industry experts. Some participants also noticed that the regulatory framework would need to be adapted to the cultural differences all around the world.

The upcoming workshop on the 23rd of February 2022, 11-14 CET “Boosting Innovations and Maximising Societal Impact. Role of Digital Innovation Hubs (DIHs) in Robotics for Inspection & Maintenance”. We will look at digital innovation hubs as a way to connect institutions and SMEs, helping to close the knowledge gap of non-technological issues of robotics in Inspection & Maintenance. We will focus on opportunities which bring SMEs and tech startups together and how they can potentially boost their innovations in the respected area. The workshop will feature representatives from digital innovation hubs, as well as industry experts.
In this episode, Audrow Nash speaks to Steve Macenski, who is the Open Source Robotics Engineering Lead at Samsung Research America. Steve leads the Nav2 project, which is an open source robot navigation framework. In this conversation, they talk about the problem and challenges of robot navigation, how Nav2 works at a high level, hybrid planners, and about Steve’s experience working with the Nav2 community.
Episode Links
Podcast info
Oleg Shipitko, Chief Technical Director of Evocargo, an integrated logistics service company using autonomous vehicles speaks with Kate. Oleg talks about the need for automating operational logistics inside enclosed facilities centers and how their autonomous vehicles and other operational services can greatly improve the current way we transport goods within facilities such as ports, warehouses and factories. Oleg also discusses the sensing choices for the specific use cases of these autonomous vehicles.
Oleg Shipitko

Oleg Shipitko is the Chief Technical Director of Evocargo. He has a bachelors and masters degree in autonomous information and control systems (bachelors: 4.96/5.0, masters: 5.0/5.0), and a PhD in Space Science and Technology with focus in Mathematical modeling, numerical methods and program complexes.
Oleg has received numerous awards including: Best paper awarded at 32nd European Conference on Modeling and Simulation (ECMS-2018): Ground Vehicle Localization With Particle Filter Based On Simulated Road Marking Image and Best paper awarded at IV International Conference on Information Technology and Nanotechnology (ITNT-2018): Gaussian filtering for FPGA based image processing with High-Level Synthesis tools.
Links

NAO robot. Image credits: Stephen Chin on Flickr [CC BY 2.0]
Created by the French company ‘Aldebaran Robotics’ in 2008, and acquired by ‘Softbank Robotics Japan’ in 2015, NAO is an autonomous and programmable humanoid robot that has been successfully applied to research and development applications for children and adults. More than 13,000 NAO robots are used in more than 70 countries around the world. Pretty much every lab working in human-robot interaction research owns a NAO making it the social robot that has been the most used in the history of the field.
In our paper ‘10 Years of Human-NAO Interaction Research: A Scoping Review’ published in Frontiers in Robotics and AI, we present an overview of the evolution of NAO’s technical capabilities. We also present the main results from a scoping review of the human-robot interaction research literature in which NAO was used.
Appearance-wise, NAO hasn’t aged a bit. The childish anthropomorphic appearance of the robot has stayed pretty much the same over the last 10 years. However, a lot of improvement has been made over the last versions of the robots.
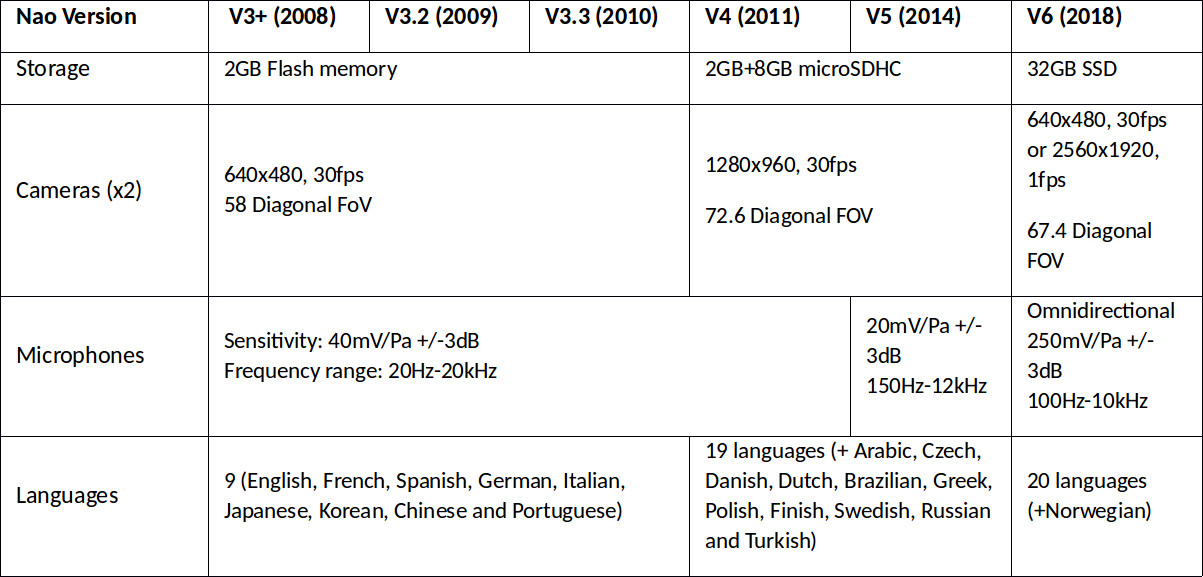
Evolution of the NAO robot’s technical characteristic since 2008
We also note that the software environment for the robot has also improved over the years integrating new technologies and features as years passed: face recognition and tracking, semantic engine. The NAOqi API also supports various programming languages. In 2013, Aldebaran also created a developer community. This community platform allowed to share resources, behaviours and featured a forum. This has probably participated a lot in the expansion and adoption of robot with developers and researcher sharing designs of behaviours, and other games they developed with the robot.
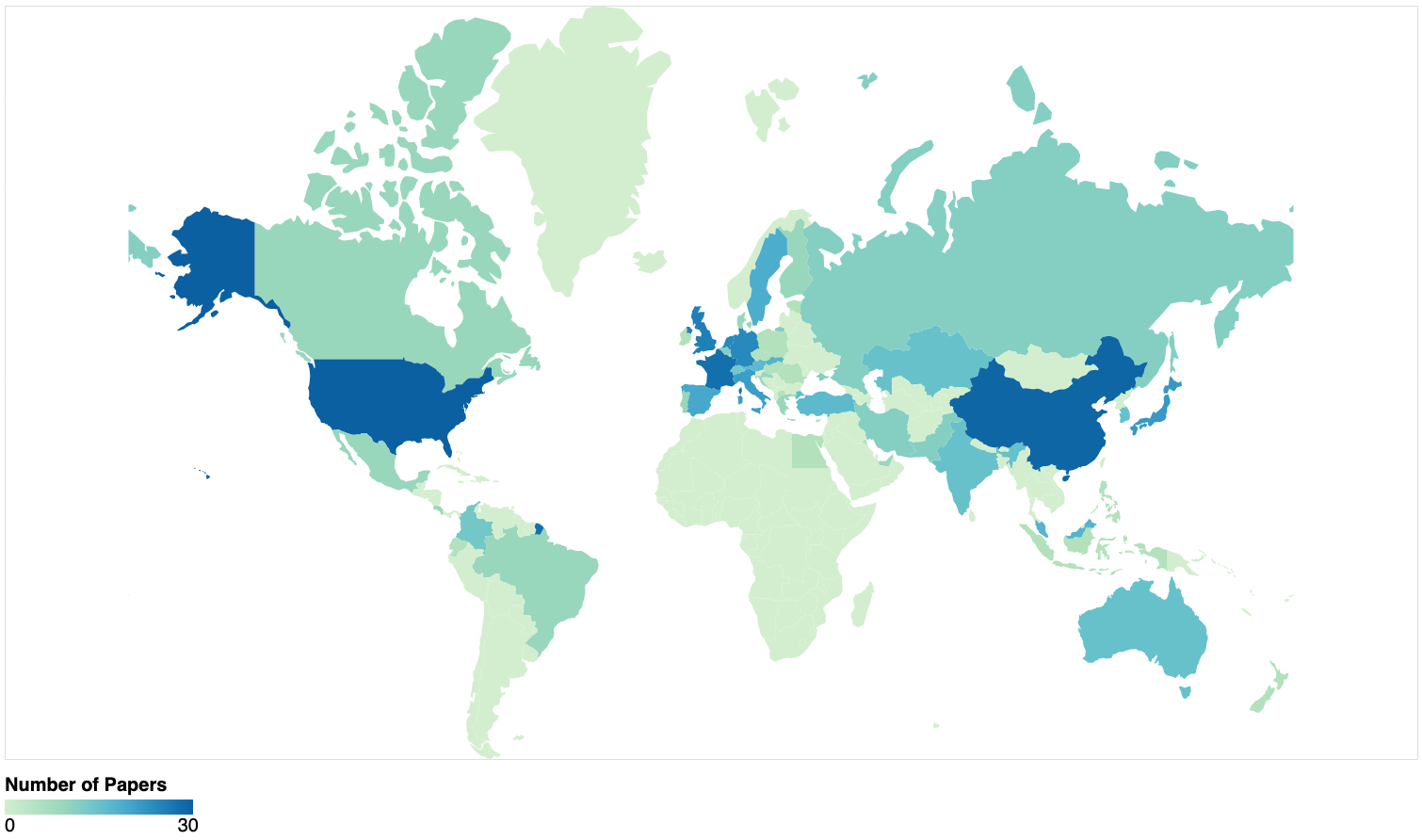
Geographical distribution of the papers included in our scoping review
The geographical distribution of authors using NAO for their research in HRI is unprecedented for a social robot. NAO has been used in more than 50 countries all around the world. And we see from the above map that the distribution is well split between North-America, Europe and Asia. But still, just like in a lot of research field the global north, tends to publish more than southern countries.
In terms of the role of the robot, researchers have investigated different application domain with the robot being used as a peer or a demonstrator in public spaces, an educational and assistant for therapists (for children with ASD, learning disability or hearing disability) being the dominant ones.
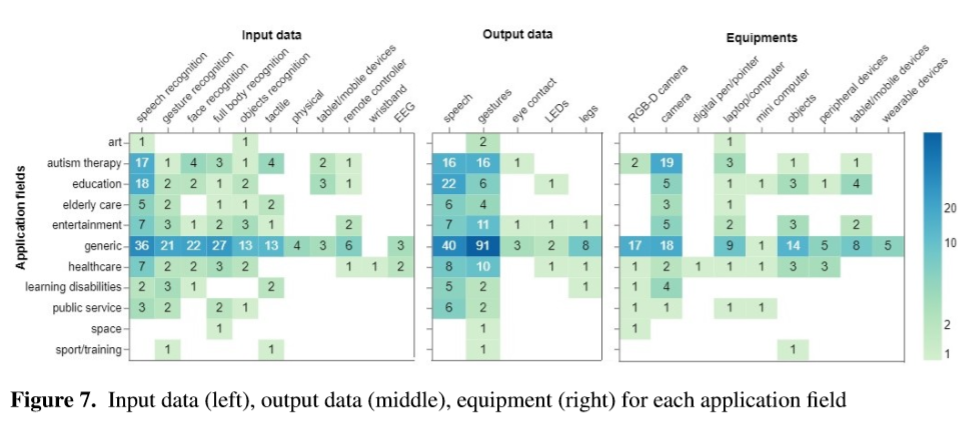
Input data (left), output data (middle), equipment (right) for each application field
As mentioned above, NAO is equipped with various sensors and actuators allowing for multi-modal interaction. Often researchers have used the robot to speak and/or make gestures. On the perception side, the robot’s limited speech recognition and poor microphone quality refrained researcher to use NLP but instead made them rely on facial, and gesture recognition. We also noted in our analysis that researchers often used external devices such as RGBD cameras or tablets in order to capture other signals allowing to assess the situation.
Multiple studies reported how fun and enjoyable was the appearance of the robot. NAO is certainly not just an eye-catcher robot as its portability is highly appreciated by the researchers. NAO can be regarded as a plug-and-play robot due to its robust and easy setup characteristics. It has also been found affordable compared to other humanoid robots.
On the other side, several technical issues were reported such as low battery life and overheating issues. The speech recognition limits the interaction distance and context (i.e. noisy environments). Finally, not much embedded autonomous functionality could be used in the initial versions.
Over the years, several types of communities have formed around the NAO robotic platform.
In 2010, the University of Tokyo piloted a new educational program developed by Aldebaran Robotics that aimed to train students to use NAO. Along with some discounts to buy NAO for educational purposes, the company released some ebooks. The books and educational program cover both technical aspects of using the robot as well as more creative projects that can be given as exercise to students. The educational market certainly helped in making NAO widely used in the 2010’s.
In 2007, the Robocup decided to use the NAO robot as the official platform for its soccer league. As detailed in the review, this led to fruitful advancement on technical capabilities of the robot such as its locomotion and vision system.
More recently, the introduction of the Pepper robot as a new platform for the robocup@Home challenge certainly can let us think that it will boost the robot’s economical life and produce more advances in social and at home tasks with the robot.
Aldebaran had a strong Research & Development strategy in its early days and naturally became partner of several large European projects: ALIZ-E, DREAM, SQUIRREL, L2Tor. These strategies had the advantage to form the future researchers in the use of their platform and made NAO a dominant robot in human-robot interaction research between 2015 and 2019.

Image from RobotLab website visited on December 20th 2021
Recently a network of start-ups has woven around the NAO robot. Providing various services such as educational workshops, therapeutic sessions, or business and marketing services, the number of these start-ups have raised these past few years (e.g. Interactive Robotics, RobotLAB and Avatarion).
In our review, we present a comprehensive overview on the use of NAO, which is a remarkable social robot in many instances. So far, NAO has been exposed to a challenging yet rewarding journey. Its social roles have expanded thanks to its likeable appearance and multi-modal capabilities followed by its fitness to deliver socially important tasks. Still, there are gaps to be filled in view of sustainable and user-focused human-NAO interaction. We hope that our review can contribute to the field of HRI that needs more reflection and general evidence on the use of the social robots, such as NAO in a wide variety of contexts. An implication of the findings shows a greater need for increasing the value and practical application of NAO in user-centered studies. Future studies should consider the importance of real-world and unrestricted experiments with NAO and involve other humans that might facilitate human-robot interaction.