Soft robots are better suited to certain situations than traditional robots. When interacting with an environment, humans or other living things, the inherent softness built into the structure of a robot made of rubber, for example, is safer than metal. Soft robots are also better at interacting with an unstable or uncertain environment—if a robot contacts an unpredicted object, it can simply deform to the object rather than crashing.
By collating all the robots onto one platform, we can enable the robots to operate collectively rather than individually. If all the robots are on one platform and under one traffic control, they will be able to share their location and become very efficient.
The Army of the future will involve humans and autonomous machines working together to accomplish the mission. According to Army researchers, this vision will only succeed if artificial intelligence is perceived to be ethical.
Kate speaks with Anni Kern, Head of Communication, strategy, and teams at Cybathlon for over four years. She describes the motivation and concepts for the Cybathlon organizations to develop a common platform to remove barriers between people with disabilities, technology developers, and the public. Anni also describes the specifics of Cybathlon competitions and the organization and planning.
Anni Kern
Anni Kern, CYBATHLON Head of Communication, Strategy, Teams and CYBATHLON @school. ETH Zurich is the inventor of the CYBATHLON project. The CYBATHLON offers a platform to advance research in the field of assistive technology and to promote dialogue with the public about the inclusion of people with disabilities in everyday life. The core of CYBATHLON of ETH Zurich is a unique competition in which people with physical disabilities compete against each other to complete everyday tasks using state-of-the-art technical assistance systems. At the CYBATHLON 2016, Anni Kern was responsible for the coordination and the support of the participating international CYBATHLON teams. Since 2017 she is among others responsible for the strategy, communication, conception of the live event as well as the CYBATHLON @school programme.
Increased interest, and also in dystopian perspectives, is the collective imagination built around the presence of robots in daily production. To clarify, in this article, Arcos provides a useful overview to understand the impact of robotics in the automated finishing sector.
Increased interest, and also in dystopian perspectives, is the collective imagination built around the presence of robots in daily production. To clarify, in this article, Arcos provides a useful overview to understand the impact of robotics in the automated finishing sector.
In the 2012 film "Robot and Frank", the protagonist, a retired cat burglar named Frank, is suffering the early symptoms of dementia. Concerned and guilty, his son buys him a "home robot" that can talk, do household chores like cooking and cleaning, and reminds Frank to take his medicine. It's a robot the likes of which we're getting closer to building in the real world.
Imagine you are playing an immersive game in which you are dropped into an unknown landscape with a directive to find a certain location. To advance forward in the game, you must also map the terrain so that you can then share your initial location and your map with another remote player. You have now been given a problem that, within the world of robotics is called SLAM. You have been asked to simultaneously localize and map an unknown environment.
Imagine for a moment that a road is used only for a single car and driver. Everything is smooth and wonderful. Then you wake up from that utopian dream and remember that our road networks have multiple cars of varying sizes, from different manufacturers, each with a driver with unique behaviors behind the wheel. We quickly realize that traffic conventions and rules are in place to avoid complete and utter chaos. We believe with increasing robotic use cases in the public domain as we all do see, a similar parallel reality needs to be realized and we propose that RoMi-H, an open-source robot and infrastructure framework that simplifies cross fleet robot collaboration, is the way to achieve this coming reality!
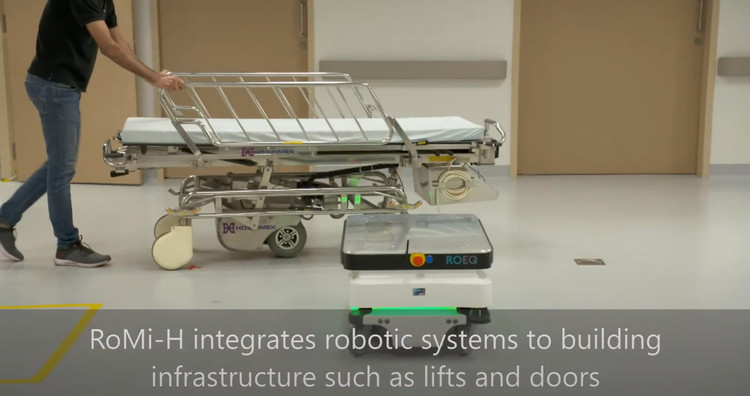
Even before the onset of COVID-19, the number of robots and automation technologies introduced and tested in the healthcare industry has been skyrocketing. Service robots perform an ever increasing and diverse set of tasks; taking on smaller and more sensitive deliveries in some cases and relying more heavily on shared infrastructure such as elevators (lifts), doors, and passageways. No single robotics or automation provider can supply the breadth of solutions required in a modern healthcare facility and no facility can afford to operate siloed systems requiring dedicated infrastructure and operating unique user interfaces. Therein lies the challenge.
ROMI-H allows robots from different vendors to interact with each other as well physical assets in the hospital like elevators. The robots can even avoid gurneys and people.
First announced in July 2018, Robotic Middleware for Healthcare (RoMi-H) is a unique open-source system built on ROS 2 and simulated using the Gazebo simulator. It allows for uniform communication and monitoring across robot platforms, sensors, and enterprise information systems. A brief explanation of this initiative can be found in WIRED Magazine: As Robots Fill the Workplace, They Must Learn to Get Along. In tomorrow’s reality, interoperability must be front and center for every developer, manufacturer, systems integrator, and end-user.
As we have written before:
We need food-delivery robots from one vendor to communicate with drug-delivery robots from another vendor. We need a unified approach to command and control for all the robots in a facility. We need a reliable way to develop and test multi-vendor systems in software simulation prior to deployment. And for it to succeed we need this critical interoperability infrastructure to be open source.
Under the leadership of Singapore’s Centre for Healthcare Assistive and Robotics Technology (CHART) and with collaborators such as IHiS, Hope Technik, GovTech and other solution providers, Open Robotics has been working since 2018 to develop an open-source software solution. Its goal is to realize the potential of a vendor agnostic and interoperable communication system for heterogeneous robots, sensors, and information systems in the healthcare space. To accelerate its development we are encouraging contributions to the open-source codebase to accelerate the development of a robust and sustainable system.
RVIZ Shows each robot’s planned path as well as keep out areas for other robots with ROMI-H
In order to understand the underlying mechanics of RoMi-H, we encourage you to take a look at Programming Multiple Robots with ROS 2. It is being continuously updated and will provide you with a thorough explanation of ROS 2 — upon which RoMi-H is built — and the core Robotics Middleware Framework (RMF) that serves to power RoMi-H. The book also features a tutorial on how one might build a web application that can interface with RoMi-H to create useful applications for robot operators or user-facing tools for the robotics industry.
RoMi-H is able to apply the same software across the different robotic systems while ROS 2 manages the communication and data routing from machine to machine; allowing for real-time, dependable and high-performance data exchanges via a publish-subscribe pattern. Publishers group their messages into different classes and subscribers receive information from the classes of messages they have indicated an interest in. This allows RMF to provide a common platform for integrating heterogeneous robotic systems.
We see the RoMi-H project as a significant step, encouraging an open and integrated approach to robotics development and digitising healthcare. We are looking forward to receiving feedback and contributions from interested parties.
RMF can take a simple map and translate it into a Gazebo simulation. The entire system is powered by ROS 2.
Learn More
A public webinar that introduced RMF and featured a live demonstration took place on 18 August 2020 in the CHART Lab. The presentations and recordings can be viewed here. At the same time, if you are interested in finding out more and viewing the source code, do check out the ROS 2 book and the following repositories:
We would like to acknowledge the Singapore government for their vision and support to start this ambitious research and development project, “Development of Standardised Robotics Middleware Framework – RMF detailed design and common services, large-scale virtual test farm infrastructure, and simulation modelling”. The project is supported by the Ministry of Health (MOH) and the National Robotics Program (NRP).
Any opinions, findings and conclusions or recommendations expressed in this material are those of the author(s) and do not reflect the views of the NR2PO, MOH or other parties.
Reservoir computing is a highly promising computational framework based on artificial recurrent neural networks (RNNs). Over the past few years, this framework was successfully applied to a variety of tasks, ranging from time-series predictions (i.e., stock market or weather forecasting), to robotic motion planning and speech recognition.
Robots are rapidly changing operations in numerous industries — from agriculture to medicine. The construction sector is also investing in them, and that trend seems set to continue.
Combining drone imagery with weather data and planting schemes to forecast how much fresh vegetables a harvest is going to yield; that’s what predictive modelling intern Berend Klaver from TU Delft is sweating on at VanBoven, while his bosses are entertaining the American west coast.
VanBoven is one of the ten winners of the Academic Startup Competition 2020, currently on tour in Silicon Valley for a 4-week incubator programme.
“The market of fresh vegetables is one of constant shortages and surpluses. VanBoven predicts the harvest of fresh produce to perfectly align supply and demand. The result is decreased food waste, a resilient value chain and fair prices,” says the startup on its website.
The result is decreased food waste, a resilient value chain and fair prices.
So this firm from The Hague does not favour any particular party in the value chain, even though we do get a sense that it may have special empathy for farmers. What’s unique about the robot-powered predictions made by Klaver and his colleagues, is their cooperative deployment. The models are being used to foster symbiotic relations between all players in the system: growers of fresh vegetables, distributors and processors, agricultural service providers and retailers too. These parties can now all work together to anticipate fluctuations and coordinate a joint response to the unpredictability of nature and markets.
A refreshing proposition that could point towards a more positive future of work.
As an alternative to cutthroat, winner-takes-all capitalism, it seems a refreshing proposition that could point towards a more positive future of work. Maybe today’s tech startups from The Netherlands are not just soaking up insights during their missions to Silicon Valley, but are dishing them out too. ‘How Dutch-style Cosiness Breeds Resilience and Wellbeing’; we can already picture that headline in WIRED.
The Academic Startup Competition is an initiative of the Association of Universities in the Netherlands (VSNU), the Netherlands Academy of Technology and Innovation (AcTI), the Netherlands Federation of University Medical Centres (NFU) and Techleap.nl. It is also supported by the Ministry of Economic Affairs and Climate Policy.
The competition aims to highlight the importance of valorisation in the academic world. In addition to a Silicon Valley tour hosted by Holland in the Valley, an ecosystem for Dutch entrepreneurs in the San Francisco Bay Area, the winners are also being showered with perks such as introductions to networks, coaching programmes and the right to carry the title ‘Best Academic Startup of 2020’.
Researchers at the Max Planck Institute for Intelligent Systems (MPI-IS) and ETH Zürich have recently created HuggieBot 2.0, a robot that can hug users at their request. This robot, set to be presented at the ACM/IEEE International Conference on Human-Robot Interaction (HRI) in March, builds on a previous robotic system created by Alexis E. Block, one of the authors, during her Master's degree.
The trend towards lithium-ion batteries in intralogistics continues. Almost all large forklift manufacturers now have models with lithium-ion drives. In the field of driverless transport systems and mobile robots, powerful lithium-ion technology is already standard.