Japan city to use robots to tackle rising school truancy
A Japanese city plans to use robots to enable pupils to attend classes virtually, as truancy rates surge due to anxiety and bullying, officials said Wednesday.
As the last days of summer set, one is wistful of the time spent with loved ones sitting on the beach, traveling on the road, or just sharing a refreshing ice cream cone. However, for many Americans such emotional connections are rare, leading to high suicide rates and physical illness. In a recent study by the Surgeon General, more than half of the adults in the USA experience loneliness, with only 39% reporting feeling “very connected to others.” As Dr. Vivek H. Murthy states: “Loneliness is far more than just a bad feeling—it harms both individual and societal health. It is associated with a greater risk of cardiovascular disease, dementia, stroke, depression, anxiety, and premature death. The mortality impact of being socially disconnected is similar to that caused by smoking up to 15 cigarettes a day and even greater than that associated with obesity and physical inactivity.” In dollar terms, this epidemic accounts for close to $7 billion of Medicare spending annually, on top of $154 billion of yearly worker absenteeism.

As a Venture Capitalist, I have seen a growing number of pitch decks for conversational artificial intelligence in place of organic companions (some of these have wellness applications, while others are more lewd). One of the best illustrations of how AI-enabled chatbots are entering human relationships is in a recent article by the New York Times reporter Erin Griffin, who spent five days testing the AI buddy Pi. Near the end of the missive, she exclaims, “It wasn’t until Monday morning, after hours of intermittent chatting throughout the weekend, that I had my ‘aha’ moment with Pi. I was feeling overwhelmed with work and unsure of how to structure my day, a recurring hangup that often prevents me from getting started. ‘Good morning,’ I typed into the app. ‘I don’t have enough time to do everything I need to do today!’ With a level of enthusiasm only a robot could muster before coffee, Pi pushed me to break down my to-do list to create a realistic plan. Like much of the bot’s advice, it was obvious and simple, the kind of thing you would read in a self-help article by a productivity guru. But it was tailored specifically to me — and it worked.” As the reporter reflected on her weekend with the bot, she commented further, “I could have dumped my stress on a family member or texted a friend. But they are busy with their own lives and, well, they have heard this before. Pi, on the other hand, has infinite time and patience, plus a bottomless well of encouraging affirmations and detailed advice.”

In a population health study cited by General Murthy, the demographic that is most isolated in America is people over the age of 65. This is also the group that is most affected by physical and cognitive decline due to loneliness. Doctors Qi and Wu presented to Neurology Live a survey of the benefits of AI in their June paper, “ChatGPT: A Promising Tool to Combat Social Isolation and Loneliness in Older Adults With Mild Cognitive Impairment.” According to the authors, “ChatGPT can provide emotional support by offering a nonjudgmental space for individuals to express their thoughts and feelings. This can help alleviate loneliness and provide a sense of connection, which is crucial for well-being.” The researchers further cited ancillary uses, “ChatGPT can also assist with daily tasks and routines. By offering reminders for appointments, medications, and other daily tasks, this AI model can help older adults with MCI (mild cognitive impairment) maintain a sense of independence and control over their lives.” The problem with ChatGPT for geriatric plus populations is the form factors, as most seniors are not the most tech-savvy. This is an opportunity for roboticists.

Last Tuesday, Intuition Robotics announced it scored an additional financing of $25 million for expanding its “AI care companions” to all senior households. While its core product, ElliQ, does not move, its engagement offers the first glimpse of the benefits of social robots at mass. In speaking about the future, I interviewed its founder/CEO, Dor Skuler, last week. He shared with me his vision, “At this time, we don’t have plans to add legs or wheels to ElliQ, but we are always looking to add new activities or conversational features that can benefit the users. Our goal is to continue getting ElliQ into as many homes as possible to spread its benefits to even more older adults. We plan to create more partnerships with governments and aging agencies and are developing more partnerships within the healthcare industry. With this new funding, we will capitalize on our strong pipeline and fund the growth of our go-to-market activities.”
Unlike the stuffed animal executions of Paro and Tombot, ElliQ looks like an attractive home furnishing (and winner of the 2003 International Design Award). According to Skuler, this was very intentional, “We placed very high importance on the design of ElliQ to make it as easy as possible to use. We also knew we older adults needed technology that celebrated them and the aging process rather than focusing on disabilities and what they may no longer be able to do by themselves.” At the same time, the product underwent a rigorous testing and development stage that put its customer at the center of the process. “We designed ElliQ with the goal of helping seniors who are aging in place at home combat loneliness and social isolation. This group of seniors who participated in the development and beta testing helped us to shape and improve ElliQ, ensuring it had the right personality, character, mannerisms, and other modalities of interaction (like movement, conversation design, LEDs, and on-screen visuals) to form meaningful bonds with real people.” He further observed in the testing with hundreds of seniors, “we’ve witnessed older adults forming an actual relationship with ElliQ, closer to how one would see a roommate rather than a smart appliance.”
The results since deploying in homes throughout New York have been astounding in keeping older populations more socially and mentally engaged. As ElliQ’s creator elaborated, “In May 2022, we announced a partnership with the New York State Office for the Aging to bring 800+ ElliQ units to seniors across New York State at no cost to the end users. Just a few weeks ago this year, we announced a renewal of that partnership and the amazing results we’ve seen so far including a 95% reduction in loneliness and great improvement in well-being among older adults using the platform. ElliQ users throughout New York have demonstrated exceptionally high levels of engagement consistently over time, interacting with their ElliQ over 30 times per day, 6 days a week. More than 75% of these interactions are related to improving older adults’ social, physical, and mental well-being.”
To pedestrian cynics, ElliQ might look like an Alexa knockoff leading them to question why couldn’t the FAANG companies cannibalize the startup. Skuler’s response, “Alexa and other digital assistant technology were designed with the masses in mind or for younger end users. They also focus mainly on reactive AI, meaning they do not provide suggestions or talk with users unless prompted. ElliQ is designed to engage users over time, using a proactive approach to engagement. Its proactive suggestions and conversational capabilities foster a deep relationship with the user. Moreover, ElliQ’s integration of Generative AI and Large Language Models (LLMs) enables rich and continuous conversational experiences, allowing for more contextual, personalized, and goal-driven interactions. These capabilities and unique features such as drinking coffee with ElliQ in cafes around the world or visiting a virtual art museum, bring ElliQ and the user close together, creating trust that allows ElliQ to motivate the older adult to lead a more healthy and engaged lifestyle.”
While ElliQ and OpenAI’s ChatGPT have shown promise in treating mental illness, some health professionals are still not convinced. At MIT, professor and psychologist, Sherry Turkle, worries that the interactions of machines “push us along a road where we’re encouraged to forget what makes people special.” Dr. Turkle demures, “The performance of empathy is not empathy. The area of companion, lover therapist, best friend is really one of the few areas where people need people.”
Source: OpenAI’s DALL·E 2 with prompt “a hyperrealistic picture of a robot reading the news on a laptop at a coffee shop”
Welcome to the 4th edition of Robo-Insight, a biweekly robotics news update! In this post, we are excited to share a range of new advancements in the field and highlight robots’ progress in areas like mobile applications, cleaning, underwater mining, flexibility, human well-being, depression treatments, and human interactions.
In the world of system adaptions, researchers from Eindhoven University of Technology have introduced a methodology that bridges the gap between application developers and control engineers in the context of mobile robots’ behavior adaptation. This approach leverages symbolic descriptions of robots’ behavior, known as “behavior semantics,” and translates them into control actions through a “semantic map.” This innovation aims to simplify motion control programming for autonomous mobile robot applications and facilitate integration across various vendors’ control software. By establishing a structured interaction layer between application, interaction, and control layers, this methodology could streamline the complexity of mobile robot applications, potentially leading to more efficient underground exploration and navigation systems.
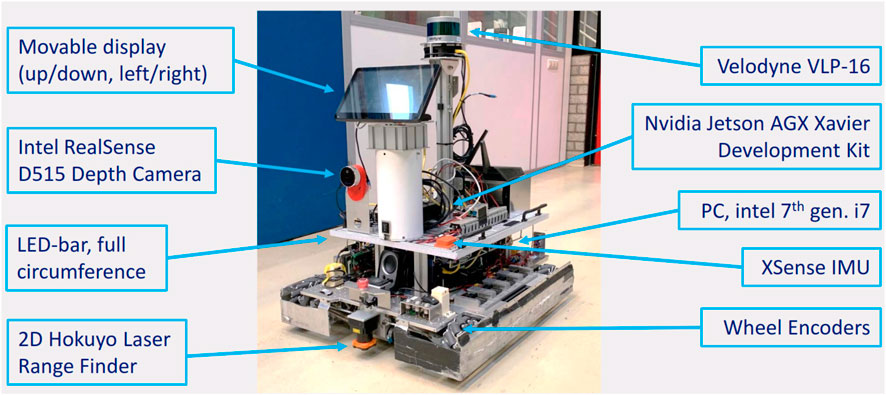
The frontal perspective of the mobile platform (showcases hardware components with blue arrows). Source.
Speaking of helpful robots, Princeton University has created a robot named TidyBot to address the challenge of household tidying. Unlike simple tasks such as moving objects, real-world cleanup requires a robot to differentiate between objects, place them correctly, and avoid damaging them. TidyBot accomplishes this through a combination of physical dexterity, visual recognition, and language understanding. Equipped with a mobile robotic arm, a vision model, and a language model, TidyBot can identify objects, place them in designated locations, and even infer proper actions with an 85% accuracy rate. The success of TidyBot demonstrates its potential to handle complex household tasks.
TidyBot in work. Source.
Shifting our focus to underwater environments, researchers are addressing the efficiency hurdles faced in deep-sea mining through innovative path planning for autonomous robotic mining vehicles. With deep-sea manganese nodules holding significant potential, these robotic vehicles are essential for their collection. By refining path planning methods, the researchers aim to improve the efficiency of these vehicles in traversing challenging underwater terrains while avoiding obstacles. This development could lead to more effective and responsible resource extraction from the ocean floor, contributing to the sustainable utilization of valuable mineral resources.
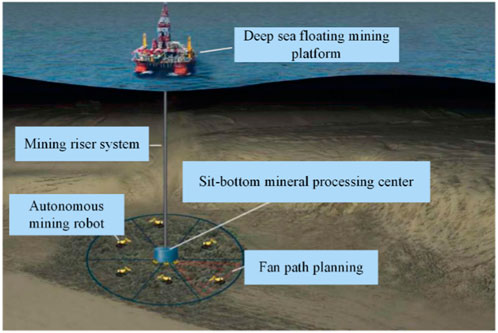
Diagram depicting the operational framework of the deep-sea mining system. Source.
In regards to the field of robotic motion, recently researchers from Shanghai Jiao Tong University have developed small-scale soft robots with remarkable dexterity, enabling immediate and reversible changes in motion direction and shape reconfiguration. These robots, powered by an active dielectric elastomer artificial muscle and a unique chiral-lattice foot design, can change direction during fast movement with a single voltage input. The chiral-lattice foot generates various locomotion behaviors, including forward, backward, and circular motion, by adjusting voltage frequencies. Additionally, combining this structural design with shape memory materials allows the robots to perform complex tasks like navigating narrow tunnels or forming specific trajectories. This innovation opens the door to next-generation autonomous soft robots capable of versatile locomotion.
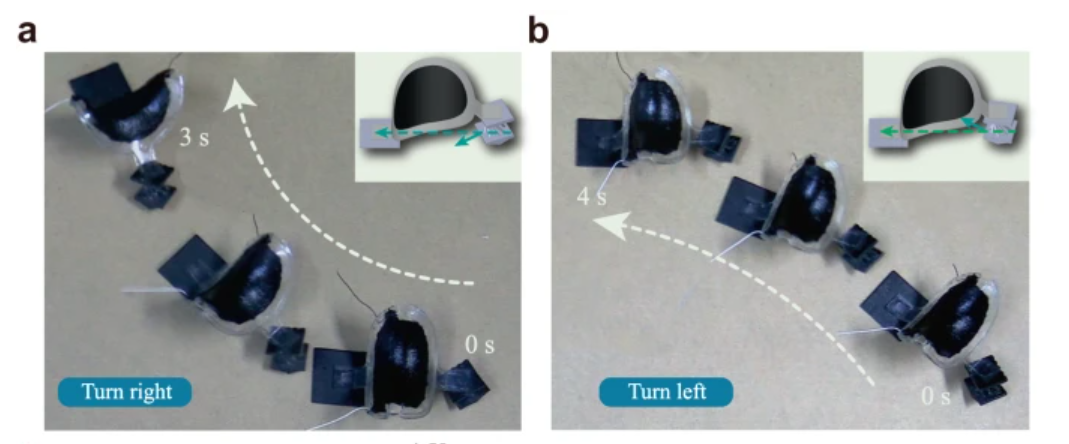
The soft robot achieves circular motion in either right or left directions by positioning the lattice foot towards the respective sides. Source.
Turning our focus to robot use in the healthcare field, Stanford students, along with researchers and doctors, have partnered with AI and robotics industry leaders to showcase new robotic dogs designed to interact with pediatric patients at Lucile Packard Children’s Hospital. Patients at the hospital had the opportunity to engage with the playful robots, demonstrating the potential benefits of these mechanical pets for children’s well-being during their hospital stays. The robots, called Pupper, were developed by undergraduate engineering students and operated using handheld controllers. The goal of the demonstration was to study the interaction between the robots and pediatric patients, exploring ways to enhance the clinical experience and reduce anxiety.

A patient playing with the robotic dog. Source.
Along the same lines as improving well-being, a recent pilot study has explored the potential benefits of using robotics in transcranial magnetic stimulation (TMS) for treating depression. Researchers led by Hyunsoo Shin developed a custom TMS robot designed to improve the accuracy of TMS coil placement on the brain, a critical aspect of effective treatment. By employing the robotic system, they reduced preparation time by 53% and significantly minimized errors in coil positioning. The study found comparable therapeutic effects on depression severity and regional cerebral blood flow (rCBF) between the robotic and manual TMS methods, shedding light on the potential of robotic assistance in enhancing the precision and efficiency of TMS treatments.
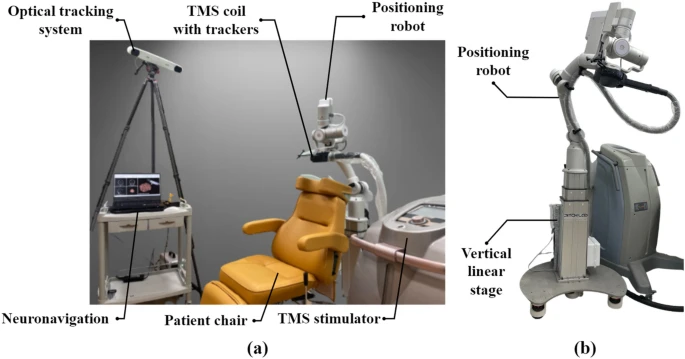
Configuration of the robotic repetitive transcranial magnetic stimulation (rTMS) within the treatment facility, and robotic positioning device for automated coil placement. Source.
Finally, in the world of human-robot enhancement, a study conducted by researchers from various institutions has explored the potential of using robot eyes as predictive cues in human-robot interaction (HRI). The study aimed to understand whether and how the design of predictive robot eyes could enhance interactions between humans and robots. Four different types of eye designs were tested, including arrows, human eyes, and two anthropomorphic robot eye designs. The results indicated that abstract anthropomorphic robot eyes, which mimic certain aspects of human-like attention, were most effective at directing participants’ attention and triggering reflexive shifts. These findings suggest that incorporating abstract anthropomorphic eyes into robot design could improve the predictability of robot movements and enhance HRI.
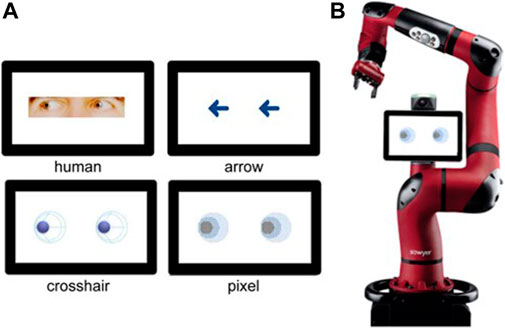
The four types of stimuli. The first row showcases the human (left) and arrow (right) stimuli. The second row displays the abstract anthropomorphic robot eyes. Photograph of the questionnaire’s subject, the cooperative robot Sawyer. Source.
The continuous stream of progress seen across diverse domains underscores the adaptable and constantly progressing nature of robotics technology, revealing novel pathways for its incorporation across a spectrum of industries. The gradual advancement in the realm of robotics reflects persistent efforts and hints at the potential implications these strides might hold for the future.
Sources: