While the obvious benefit of robotic technology is to automate business processes, there are an abundance of opportunities for robotic technology to improve the lives of humans without engaging in automation.
Homecare robots are already the primary driver of revenue for the wider consumer robotics market. This trend is expected to increase, following a banner year of revenue and shipment growth from floor care market leader iRobot.
Robotic surgery is deemed by and large safer than open surgery. The hospital stay is shorter, reducing the risk of infection; pain and discomfort is reduced; recovery time is faster; and blood loss and transfusions are lessened.
RPA is just one automation tool that can play a role in a larger automation / improvement strategy, where technologies such as Business Process Automation or Business Process Management (BPM) also play a role.
In this interview, Audrow Nash speaks with Sangin Park, Senior Research Engineer at Hyundai, about exoskeletons. Park describes three exoskeleton prototypes: one for helping workers reduce back pain, one for assisting a person with paraplegia, and an exoskeleton for soldiers. Park discusses the sensors and actuators of each exoskeleton, as well as Hyundai’s exoskeleton ambitions.
Sangin Park
Sangin Park is a Senior Research Engineer at Hyundai.
A robotics company known for its widely shared videos of nimble, legged robots opening doors or walking through rough terrain is preparing to sell some after years of research.
Stairs are still unsurmountable obstacles for many robots. Yet a young team at ETH Zurich is building a vehicle designed to negotiate steps with ease – by hopping.
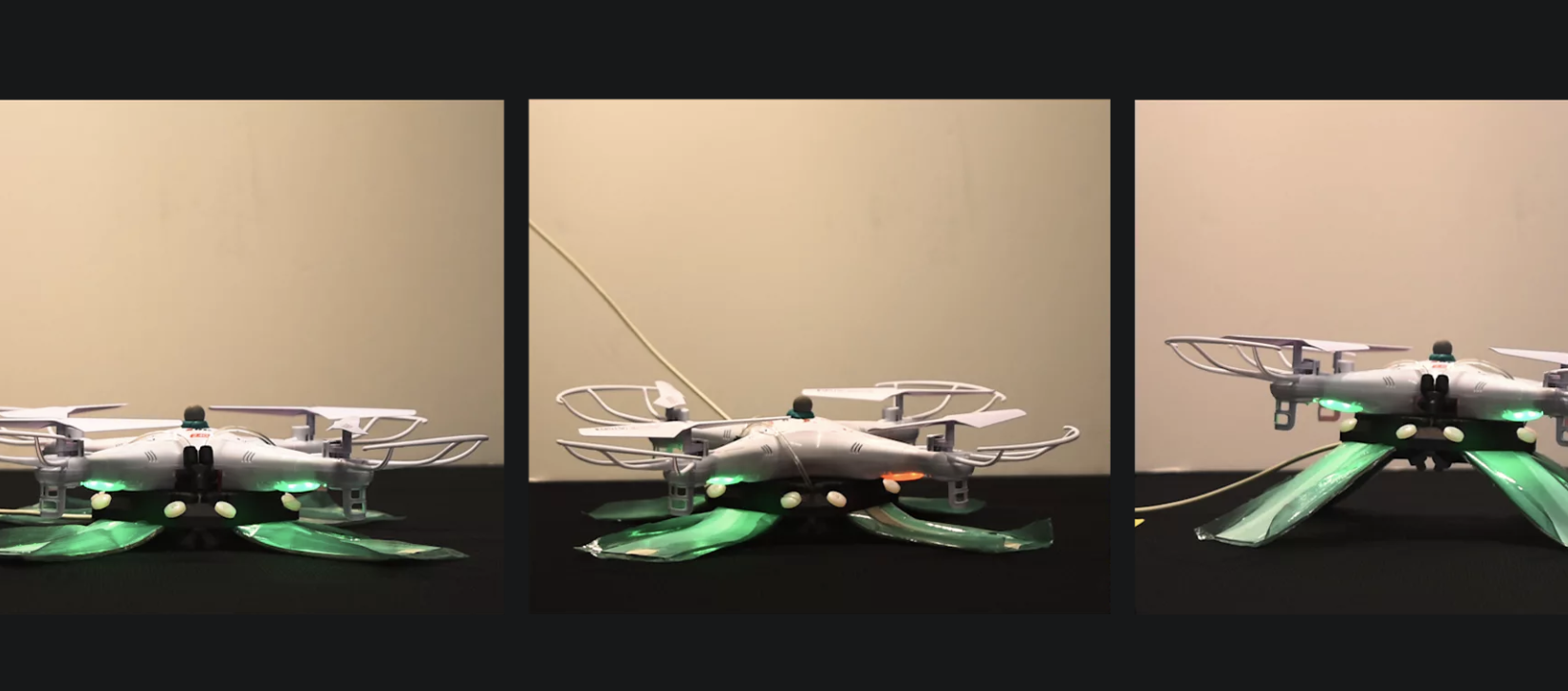
As the vacuum is applied to the flexible material, it becomes stiff and able to support the weight of the drone. Credit: Yashraj Narang
By Leah Burrows
Even octopuses understand the importance of elbows. When these squishy, loose-limbed cephalopods need to make a precise movement — such as guiding food into their mouth — the muscles in their tentacles contract to create a temporary revolute joint. These joints limit the wobbliness of the arm, enabling more controlled movements.
Now, researchers from the Wyss Institute for Biologically Inspired Engineering at Harvard University and the Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) have shown how a multi-layered structure can allow robots to mimic the octopus’ kinematics, creating and eliminating joints on command. The structure can also allow robots to rapidly change their stiffness, damping, and dynamics.
“This research helps bridge the gap between soft robotics and traditional rigid robotics,” said Yashraj Narang, first author of both studies and graduate student at SEAS. “We believe that this class of technology may foster a new generation of machines and structures that cannot simply be classified as soft or rigid.”
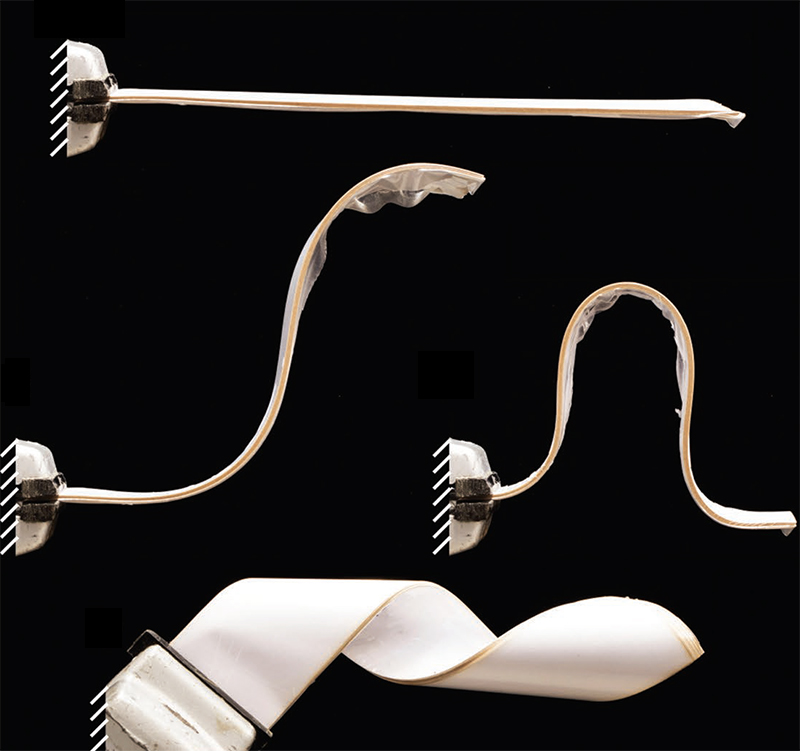
When a vacuum is applied, the layers of flexible material becomes stiff and can hold arbitrary shapes, and be molded into additional forms. Credit: Yashraj Narang/Harvard SEAS
The structure is surprisingly simple, consisting of multiple layers of flexible material wrapped in a plastic envelope and connected to a vacuum source. When the vacuum is off, the structure behaves exactly as you would expect, bending, twisting and flopping without holding shape. But when a vacuum is applied, it becomes stiff and can hold arbitrary shapes, and it can be molded into additional forms.
This transition is the result of a phenomenon called laminar jamming, in which the application of pressure creates friction that strongly couples a group of flexible materials.
“The frictional forces generated by the pressure act like glue,” said Narang. “We can control the stiffness, damping, kinematics, and dynamics of the structure by changing the number of layers, tuning the pressure applied to it, and adjusting the spacing between multiple stacks of layers.”
The research team, which included Wyss Associate Faculty member Robert Howe, Ph.D., the Abbott and James Lawrence Professor of Engineering at SEAS; Joost Vlassak, Ph.D., the Abbott and James Lawrence Professor of Materials Engineering at SEAS; and Alperen Degirmenci, a SEAS graduate student, extensively modeled the mechanical behavior of laminar jamming to better control its capabilities.
Next, they built real-world devices using the structures, including a two-fingered gripper that, without a vacuum, could wrap around and hold onto large objects and, with a vacuum, could pinch and hold onto small objects about the size of a marble.
The researchers also demonstrated the structure’s capabilities as shock absorbers by attaching them to a drone as a landing gear. The team tuned the stiffness and damping of the structures to absorb the impact of landing.
The structure is a proof-of-concept that could have many applications in the future, from surgical robots to wearable devices and flexible speakers.
“Our work has explained the phenomenon of laminar jamming and shown how it can provide robots with highly versatile mechanical behavior,” said Howe, who is the senior author of the paper. “We believe that this technology will eventually lead to robots that can change state between soft, continuous devices that can safely interact with humans, and rigid, discrete devices that can meet the demands of industrial automation.”
This research was supported in part by the National Science Foundation.
After the successful completion of the production of the material-optimised concrete façade mullions, Fabio Scotto and Ena Lloret-Frischti of the Gramazio Kohler Research Group at ETH Zurich and the Chair for Physical Chemistry of Building Materials, ETH Zurich take a look back at the experiments and prototypes which were necessary in the development of a final robotic fabrication process.
The integration of Smart Dynamic Casting (SDC) for the production of the façade mullions for the first floor of DFAB HOUSE has led us to the development of an adaptive robotic setup which allows us to produce custom-made reinforced concrete structures. Until the final development of a robust robotic process, we had to overcome several challenges during the experimental and prototypical phase.
Scaling down the production system and minimizing the friction forces
Our first main task was to scale down the production system to realise structures with a minimal cross section of 100×70 mm. This had a direct impact on the formwork system we were working with previously. We observed an increase in friction forces that resulted in accumulations of concrete along the inside walls of the formwork. This caused major issues during the casting process, specifically surface disruptions and, in some cases, a complete flow out of the fresh concrete.
To minimize the effects of the friction forces, we have defined strategies to optimize the overall process. Firstly, we engineered a much more self-compacting concrete mix with greater flowability and optimised setting times. Secondly, the formwork material was changed to stainless steel. Together with our capillary oiling concept, this ensures a significantly more frictionless casting process.
Integration of the reinforcement
Another issue we had to overcome in the research process was the integration of the reinforcement system. Although the mullions for DFAB HOUSE are not load-bearing, their structural performance is optimized for wind and self-weight load.
We developed a non-standard reinforcement system constrained within the small cross sections of the mullions. Two 12mm radius stainless steel bars, previously bent into the desired shape through CNC processes, are welded together through horizontal connection elements. The reinforcement is placed inside the formwork prior to initiating the fabrication process and fixed to lower and upper attachments. Due to the slender geometries of the mullions, the reinforcement had the tendency of bending under the effect of its own weight and the attachment system has been reviewed to avoid any deflection during the concrete casting. We devised a pulley system that allows us to fix the reinforcement in place by applying tension. In doing so, we ensure the reinforcement is held straight throughout the whole production, minimizing deflections along the entire height of the mullion.
A successful development process
After numerous experiments and prototypes, we have successfully overcome all the challenges that arose in the process and finalised an optimised fabrication procedure. The SDC mullions produced for the DFAB HOUSE display great surface quality while fulfilling the required structural criteria.
The path from university lab to commercialization is especially complex in the biotech industry. Challenges range from long lead times, sometimes measured in decades, to the costs of transforming ideas into innovations, as well as issues of intellectual property, patenting and licensing.
Ideally, hospitals and clinics would be able to justify the cost of a new robot based on scientific studies on its effectiveness and business cases on its usability. But for new platforms, these are very scarce.
One Master-and-Tool plate pair picks up and holds the protective cardboard in place, while the other Master-and-Tool plate pair carries the staple gun to the load and secures the cardboard pieces to the finished bundle.
DJI's new SDK for Windows empowers developers to build native Windows applications that can remotely control DJI drones including autonomous flight and real-time data streaming.
Touching and grasping objects are surprisingly complex processes, an area where contemporary robots are still clumsy. Principal investigator Jukka Häkkinen, Ph.D., and post-doctoral researcher Jussi Hakala, D.Sc. (Tech), have developed an imaging method for measuring human touch.


 After the successful completion of the production of the material-optimised concrete façade mullions,
After the successful completion of the production of the material-optimised concrete façade mullions,