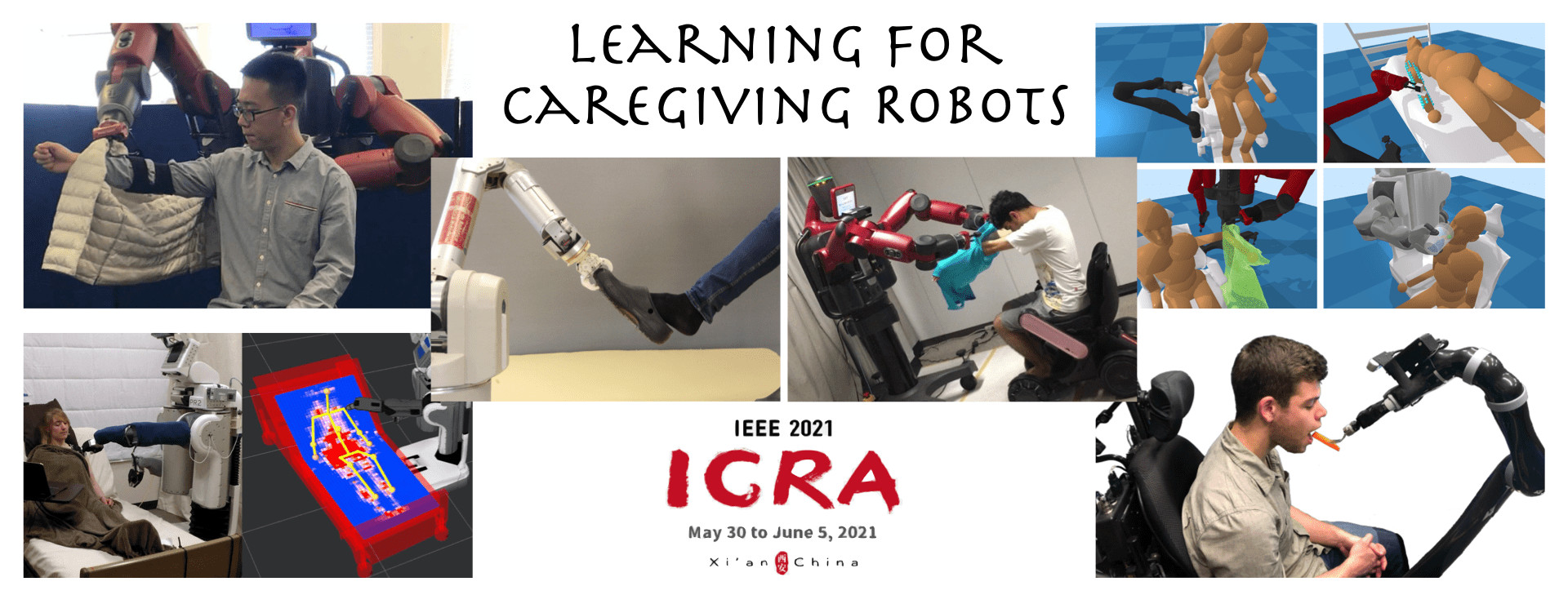
The Learning for Caregiving Robots workshop at IEEE ICRA 2021 discussed how learning can enable robotic systems towards achieving consistently efficient and safe human assistance across activities of daily living (ADLs). Here we bring you the recordings of the workshop, including talks from the nine invited speakers and two panel discussions.
Robotic caregivers could increase the independence of people with disabilities, improve quality of life, and help address growing societal needs, such as shortages of healthcare workers, aging populations that require care, and high healthcare costs. Using robotic technology to assist care-recipients in their daily lives may entail physically interacting with them, adapting to their preferences, and perceiving the environment for intelligent and safe assistance. These tasks can benefit from using data-driven machine learning techniques. Learning for caregiving in real homes depends on sensing and acting using real-world systems as well as metrics for success and generalization.
The primary objectives of the workshop were to explore the following questions:
How can learning enable robotic systems to achieve efficient and safe assistance across (Instrumental) ADLs?
What roles should (or should not) learning play for robotic caregiving?
What are the opportunities and challenges of learning in robotic caregiving?
The workshop brought together renowned scientists and young researchers from the machine learning and assistive robotics communities to share and discuss solutions that can beneficially impact human society. Enjoy the playlist with all the recorded talks below!
Although consumers eagerly purchase products made through mass customization, they want those items quickly. That need for speed is one of the main reasons why manufacturers often use robots to achieve the consistent pace required to fill orders efficiently and without errors.
A team of researchers working at Johannes Kepler University has developed an autonomous drone with a new type of technology to improve search-and-rescue efforts. In their paper published in the journal Science Robotics, the group describes their drone modifications. Andreas Birk with Jacobs University Bremen has published a Focus piece in the same journal issue outlining the work by the team in Austria.
Results from the DOTS competition were released yesterday, after an intense month with teams from around the world designing new algorithms for robot swarms tasked with delivering emergency food parcels.
The Scenario
Increases in the number of emergency food parcels distributed by food banks have accelerated over the course of the coronavirus pandemic, particularly in those going to children. Robot swarms could help streamline the distribution of these emergency food parcels, while freeing up time for volunteers and workers to interface with the users and provide human contact.
What if you could unbox a swarm of robots and immediately use them to power your organisation and transport needs? You could use them to organise the stock room of a small retail shop, or retrieve boxes in a pop-up distribution centre for school lunches.
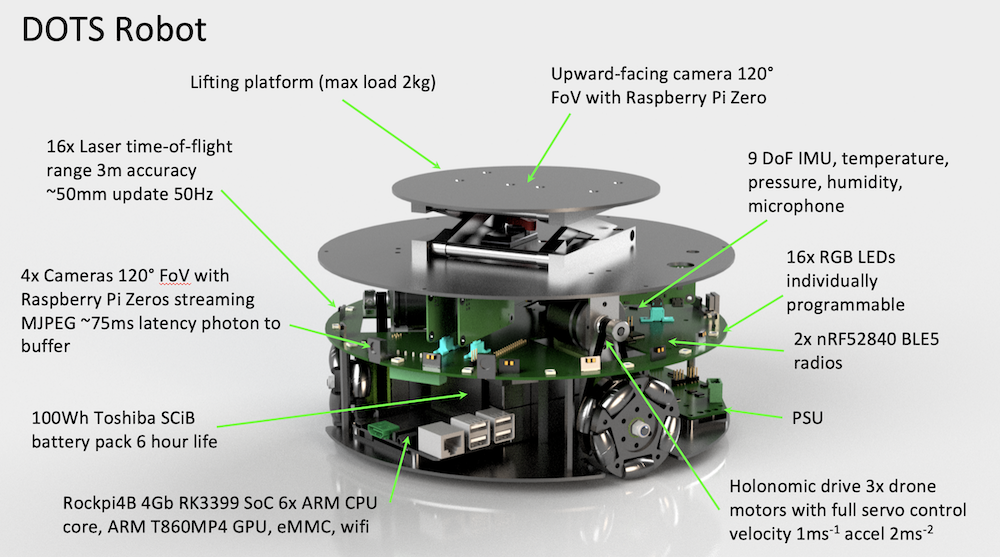
In the DOTS competition run jointly by the Bristol Robotics Laboratory, Toshiba Bristol Research and Innovation Laboratory and the South Gloucestershire Council’s UMBRELLA project, the robots used are called DOTS (Distributed Organisation and Transport Systems) and they fit the problem at hand: they don’t rely on maps or any complex infrastructure, making them both versatile and adaptable.
After years of research in swarm algorithms and hardware, we’re now at stage where we can think of real-world applications. Robot swarms make so much sense as out-of-the-box solutions that can scale and adapt to a variety of messy real-world environments.
Sabine Hauert, Associate Professor of Swarm Engineering and lead of the DOTS competition.
The Robots
The DOTS are custom-built 25cm robots, that move fast, have long battery life (8 hours), can communicate through 5G, WiFI, and bluetooth, house a GPU, and can sense the environment locally, as well as lift and transport payloads (2kg per robot). They are housed in the new Industrial Swarm Arena at the Bristol Robotics Laboratory, which is accessible remotely and 5G enabled.
“It’s taken three years to design and build the DOTS robots and simulator. I wanted the DOTS to individually be quite capable, with the latest sensing and computational capabilities so they could make sense of the world around them using distributed situational awareness. It’s been really rewarding to see them in action, and to see that others can use them too. Many of these robots were built at my house during lockdown where I have a dedicated workshop.” said Simon Jones, Research Fellow and designer of the DOTS at University of Bristol.
The Challenge
Over the past few weeks, participants in the competition have brainstormed and engineered solutions to tackle the challenge. The warehouse is a simulated 4m x 4m x 4m room in Gazebo with a 0.5m-wide strip along the right wall, acting as the dropoff zone. The 10 “carriers” that the robots must retrieve are scattered at random. Following the swarm robotics paradigm, each robot runs the same codebase: the challenge is therefore to engineer a solution where the emergent behaviour of the collective swarm results in fast retrieval.
One of the simplest solutions is for a robot to perform a random walk. As soon as a sensor detects a carrier, it can home in on the carrier and pick it up. Given enough time the robots will, collectively, retrieve all the carriers. From this basic implementation, more complex behaviours can be layered such as adding a bias for movement in a particular direction or having the robots interact to repulse or attract.
Of course, in the real world, the robots would have to contend with obstacles as well as faults in their hardware and software. The submitted solutions are also tested for their robustness and ability to overcome these hurdles. An extra level of complexity is added with the task of retrieving carriers in a given order.
“It’s been a great learning experience to see the whole pipeline from code to simulation to running with the real robots in the arena – feels like this is where progress is made towards that vision of robots integrated into our everyday lives”, said Suet Lee, PhD Student at University of Bristol who helped support the teams.
The Results
With 7 team submissions from around the world, it was exciting to see what solutions would emerge. In the end, scores were quite tight. For teams that needed extra time, we’ll be hosting a demo round later this summer.
The winners were Swarmanauts. The team included David Garzon Ramos, Jonas Kuckling, and Miquel Kegeleirs, PhD students at IRIDIA, the artificial intelligence lab of the Université libre de Bruxelles, Brussels, Belgium. They are all part of the ERC DEMIURGE project team (PI Mauro Birattari) where they investigate the automatic design of collective behaviours for robot swarms.
You can see their controller in action over the 6 tested scenarios here (unordered retrieval, unordered with lost robots, unordered with obstacles, ordered retrieval, ordered with lost robots, ordered with obstacles)
“It was exciting to participate in the DOTS competition. We enjoyed the challenge of devising and testing coordination strategies for an industry-oriented robot swarm. Next time we would like to also try automatic methods for designing the collective behavior of the robots”, said David.
In second came BusyB with team members Simon Obute and Rey Lei.
And finally, in third we had Simple Solution by Hany Hamed and their feisty controller.
Winners will be receiving this fancy award at home soom.
There were plenty of bloopers along the way with all teams, here’s one sample of how things can go wrong in slow motion:
Finally, well done to all the other teams, UGA Hero Lab, Missing in Action, Str. Robot, and C5PO for their great submissions.
Translation to reality
In the end, a simulation is no substitute for a real world environment, as useful as it is for testing. What occurs is the “reality-gap”, the error that arises from the difference between the noisy real-world environment and the simplified simulation environment. Simon was able to demonstrate a baseline controller in reality in the video below. To help transfer, the same code designed in ROS2, is built to run both in simulation and reality. Some changes were needed, such as slowing down the robots to avoid motion blur on the cameras, but many of the behaviours translated well like the obstacle avoidance, and overall swarm strategy.
It was an amazing experience to work with our cool lab-built robots! I enjoyed designing Hardware kits and it was rewarding to see it all working in real-life.
Aswath G Indra, MSc Robotics Student at University of Bristol.
Next steps
For a first DOTS Competition, it was great fun and we’re really happy with what was achieved by all involved. We have many of ideas for next year, like how to speed up computation, adding new tasks (like organising the warehouse), and will be looking to give more time to the teams to use the real-hardware remotely.
Mahesh Sooriyabandara, Managing Director at the Toshiba Bristol Research and Innovation Laboratory, said “This is a great first step towards making an internet of robots and robot swarms that are useable out of the box. We’ve been working with the Bristol Robotics Laboratory for the past 3 years to build first the robots and then the new Industrial Swarm Arena. We’re hoping many can use this infrastructure in the future, running their code in a digital twin before transferring to the new swarm testbed”.
The DOTS Competition was supported by Simon Jones, Emma Milner, Suet Lee, James Wilson, Aswath Ganesan Indra, Sabine Hauert, and the Toshiba BRIL team.
Automation solutions provider Wilder Systems has developed a unique robotic "drive-through" washing system for aircraft. The system reduces the task time by 95% and eliminates manual washing.
Thorvald: an autonomous robot from Saga RoboticsMatt Munro, Saga Robotics, Author provided
Farming robots that can move autonomously in an open field or greenhouse promise a cleaner, safer agricultural future. But there are also potential downsides, from the loss of much-needed jobs to the safety of those working alongside the robots.
To ensure that the use of autonomous robots on farms creates more benefits than losses, a process of responsible development is required. Society as a whole needs to be involved in setting the trajectories for future farming.
We are part of a project called Robot Highways, which is currently demonstrating multiple uses for autonomous robots made by Saga Robotics on a fruit farm in south-east England. Robots are now treating plant diseases in fields and glasshouses, and will be mapping terrain, picking, packing, and providing logistical support to workers over the course of the project. This is achieved by attaching different tools to an autonomous “base robot”.
In this way, autonomous farming robots have the potential to do some of the laborious agricultural work for which farmers in some countries often struggle to find employees at a cost that keeps food prices competitive. Our project has produced an estimate that robots may eventually help reduce the number of human farm workers needed by up to 40%.
At the same time, robots could help create new jobs. The UK’s National Farmers’ Union argues that increasing use of digital technologies in farms will attract younger, skilled people to a sector struggling with an ageing workforce.
Strawberries are treated for disease using UV light. Matt Munro, Saga Robotics, Author provided
There could also be environmental benefits. Swapping traditional, fossil fuel-powered farm machinery for electric robots charged from renewable sources will cut farming’s carbon emissions. Robots equipped with ultraviolet lights that can kill mildew on plants could reduce fungicide use by up to 90%.
Machines like those produced by the Small Robot Company can navigate in tight spaces between objects like trees, so could potentially be used in agroforestry systems to perform weeding, disease treatment and mapping. They could also help reduce chemical use on farms by targeting individual plants, rather than whole fields.
Autonomous robots are capable of multiple tasks, including collecting samples, selectively treating plants and mapping fields. NASAHQPhoto/Flickr
However, unrestricted use of autonomous farming robots could also create problems. In parts of the world where there is not an agricultural labour shortage, reducing the demand for human workers means people will need resources and opportunities to retrain in other sectors. They may just end up moving into dull, dangerous and underpaid jobs in other industries such as mining, which will be needed to produce the materials to make the robots.
Humans who are left on the farm – or walkers on footpaths – will face health and safety concerns from having to work alongside the robots. The possibility of someone hacking a farm robot and forcing it to do their bidding cannot be overlooked. And poorer farms that can’t afford robots at all are likely to be left at a disadvantage.
There are also concerns over the ownership of the data collected by robots operated by commercial companies – and whether that data will be used for the benefit of those companies, rather than the farmers.
Responsible development
To make sure farming robots are developed responsibly, we need to get those people who might be affected by the technology –- from manufacturers and regulators to rural communities -– thinking about all its possible implications.
This might include so-called “Wizard of Oz” studies, in which remote controlled robots are tested alongside human users in order to simulate what reactions and consequences fully autonomous robots might produce once the technology is ready. This would allow robot designers to save money and manage expectations by studying user experience at the early stages of development. Another option is hosting “robot movie nights” to help show the public how robots on the farm would behave.
Base robots with attachable tools provide a huge range of functionality. Matt Munro, Saga Robotics, Author provided
Once countries allow autonomous robots to be used on farms, safety and data-ownership regulations will need to be swiftly updated. In Australia, a code of practice for such robots has been developed in the crop sector and similar work is underway in the UK. This will set out robots’ obligations, state the conditions in which robots can be used, and determine who is responsible for worker and public safety.
The stakes of getting things wrong are high. Injured workers, hacked or unreliable robots, or negative consumer perception could all stand in the way of the promises of autonomous robots being realised. To help avoid this, governments can start providing rural digital and internet infrastructure, training, and financial support so that farmers can hit the ground running if autonomous robots hit the market.
Will we see autonomous robots picking fruit across Britain by 2025 – or even sooner? That depends: not on the quality of our technology alone, but also on our ability to work together to listen, learn and respond to the needs of farmers and society alike.
David Rose receives funding from UKRI (Innovate UK).
Marc Hanheide receives funding from UKRI and the EU Commission, and owns shares in SAGA Robotics.
Simon Pearson receives funding from UKRI. He is Co-Chair of the DEFRA Automation and Robotics Review for Horticulture
Without GPS, autonomous systems get lost easily. Now a new algorithm developed at Caltech allows autonomous systems to recognize where they are simply by looking at the terrain around them—and for the first time, the technology works regardless of seasonal changes to that terrain.
Farming robots that can move autonomously in an open field or greenhouse promise a cleaner, safer agricultural future. But there are also potential downsides, from the loss of much-needed jobs to the safety of those working alongside the robots.
The team at Amazon-owned Zoox has released an in-depth safety report detailing the safety features engineers have built into the company's autonomous vehicle, a robo-taxi, and have published it online.
Paperless automation saves space, money, and boosts security. The ease of transferring information while promoting the environmentally sound choices makes this process logical for all manufacturers, particularly food manufacturers.
Imagine flexible surgical instruments that can twist and turn in all directions like miniature octopus arms, or how about large and powerful robot tentacles that can work closely and safely with human workers on production lines. A new generation of robotic tools are beginning to be realized thanks to a combination of strong 'muscles' and sensitive 'nerves' created from smart polymeric materials. A research team led by the smart materials experts Professor Stefan Seelecke and Junior Professor Gianluca Rizzello at Saarland University is exploring fundamental aspects of this exciting field of soft robotics.
Toyota Research Institute (TRI) has announced on its press blog that engineers with the company have developed new capabilities for its line of domestic robots. The new capabilities include recognizing and manipulating transparent objects and wiping down counters and tables. In the video accompanying the announcement, a robot grabs a smartphone off a table and uses it to take a selfie video as it carries on with cleaning a kitchen.
The technological change in the automotive industry, among others, is also affecting the Zimmer Group - the automation specialist from Germany is well prepared.
Humans and robots may be sharing some of the same goals and manufacturing spaces soon as autonomy and robot technology continue to advance. Researchers at Texas A&M University are analyzing how they can work in unison to allow for one party to step up where the other may temporarily lack.
Humans and robots may be sharing some of the same goals and manufacturing spaces soon as autonomy and robot technology continue to advance. Researchers at Texas A&M University are analyzing how they can work in unison to allow for one party to step up where the other may temporarily lack.