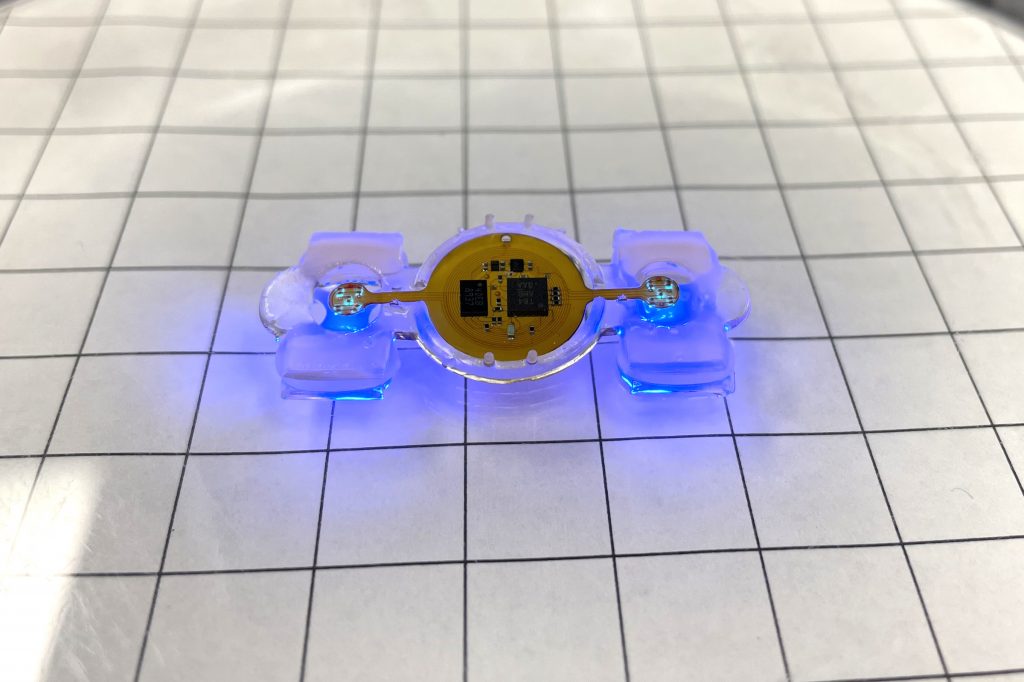
A photograph of an eBiobot prototype, lit with blue microLEDs. Remotely controlled miniature biological robots have many potential applications in medicine, sensing and environmental monitoring. Image courtesy of Yongdeok Kim
By Liz Ahlberg Touchstone
First, they walked. Then, they saw the light. Now, miniature biological robots have gained a new trick: remote control.
The hybrid “eBiobots” are the first to combine soft materials, living muscle and microelectronics, said researchers at the University of Illinois Urbana-Champaign, Northwestern University and collaborating institutions. They described their centimeter-scale biological machines in the journal Science Robotics.
“Integrating microelectronics allows the merger of the biological world and the electronics world, both with many advantages of their own, to now produce these electronic biobots and machines that could be useful for many medical, sensing and environmental applications in the future,” said study co-leader Rashid Bashir, an Illinois professor of bioengineering and dean of the Grainger College of Engineering.

Rashid Bashir. Photo by L. Brian Stauffer
Bashir’s group has pioneered the development of biobots, small biological robots powered by mouse muscle tissue grown on a soft 3D-printed polymer skeleton. They demonstrated walking biobots in 2012 and light-activated biobots in 2016. The light activation gave the researchers some control, but practical applications were limited by the question of how to deliver the light pulses to the biobots outside of a lab setting.
The answer to that question came from Northwestern University professor John A. Rogers, a pioneer in flexible bioelectronics, whose team helped integrate tiny wireless microelectronics and battery-free micro-LEDs. This allowed the researchers to remotely control the eBiobots.
“This unusual combination of technology and biology opens up vast opportunities in creating self-healing, learning, evolving, communicating and self-organizing engineered systems. We feel that it’s a very fertile ground for future research with specific potential applications in biomedicine and environmental monitoring,” said Rogers, a professor of materials science and engineering, biomedical engineering and neurological surgery at Northwestern University and director of the Querrey Simpson Institute for Bioelectronics.
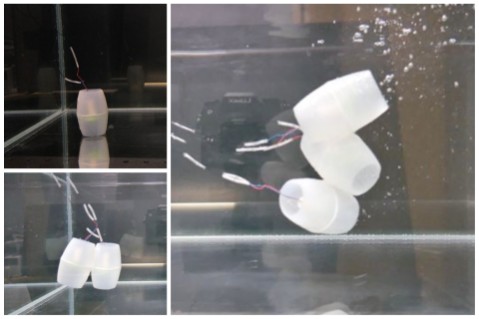
Remote control steering allows the eBiobots to maneuver around obstacles, as shown in this composite image of a bipedal robot traversing a maze. Image courtesy of Yongdeok Kim
To give the biobots the freedom of movement required for practical applications, the researchers set out to eliminate bulky batteries and tethering wires. The eBiobots use a receiver coil to harvest power and provide a regulated output voltage to power the micro-LEDs, said co-first author Zhengwei Li, an assistant professor of biomedical engineering at the University of Houston.
The researchers can send a wireless signal to the eBiobots that prompts the LEDs to pulse. The LEDs stimulate the light-sensitive engineered muscle to contract, moving the polymer legs so that the machines “walk.” The micro-LEDs are so targeted that they can activate specific portions of muscle, making the eBiobot turn in a desired direction. See a video on YouTube.
The researchers used computational modeling to optimize the eBiobot design and component integration for robustness, speed and maneuverability. Illinois professor of mechanical sciences and engineering Mattia Gazzola led the simulation and design of the eBiobots. The iterative design and additive 3D printing of the scaffolds allowed for rapid cycles of experiments and performance improvement, said Gazzola and co-first author Xiaotian Zhang, a postdoctoral researcher in Gazzola’s lab.
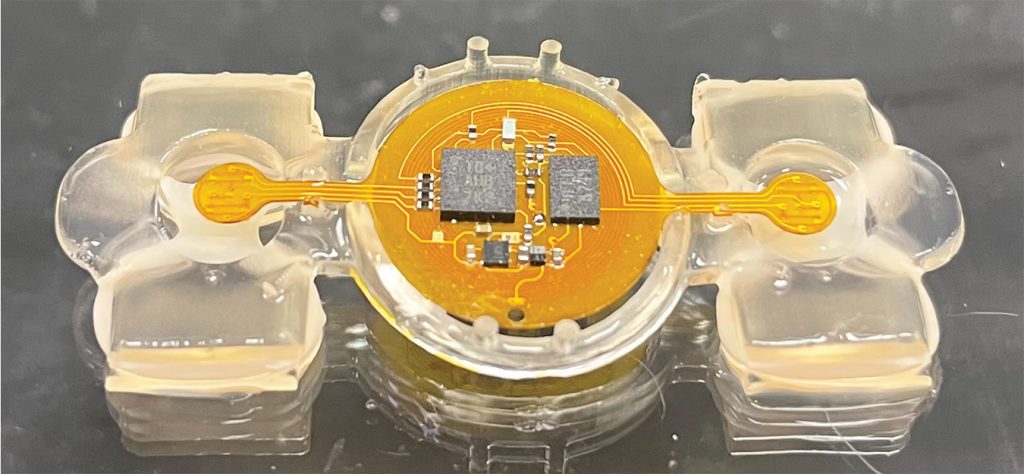
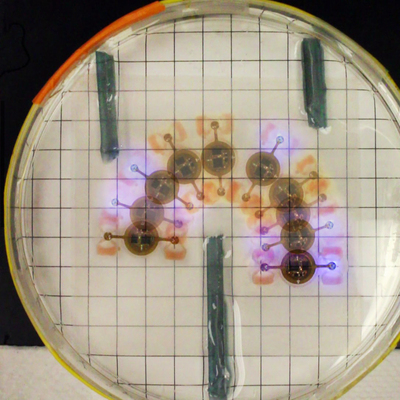
The eBiobots are the first wireless bio-hybrid machines, combining biological tissue, microelectronics and 3D-printed soft polymers. Image courtesy of Yongdeok Kim
The design allows for possible future integration of additional microelectronics, such as chemical and biological sensors, or 3D-printed scaffold parts for functions like pushing or transporting things that the biobots encounter, said co-first author Youngdeok Kim, who completed the work as a graduate student at Illinois.
The integration of electronic sensors or biological neurons would allow the eBiobots to sense and respond to toxins in the environment, biomarkers for disease and more possibilities, the researchers said.
“In developing a first-ever hybrid bioelectronic robot, we are opening the door for a new paradigm of applications for health care innovation, such as in-situ biopsies and analysis, minimum invasive surgery or even cancer detection within the human body,” Li said.
The National Science Foundation and the National Institutes of Health supported this work.
- PAPER – Remote control of muscle-driven miniature robots with battery-free wireless optoelectronics. Yongdeok Kim, Yiyuan Yang, Xiaotian Zhang,Zhengwei Li, Abraham Vázquez-Guardado, Insu Park, Jiaojiao Wang, Andrew I. Efimov, Zhi Dou, Yue Wang, Junehu Park, Haiwen Luan, Xinchen Ni, Yun Seong Kim, Janice Baek, Joshua Jaehyung Park, Zhaoqian Xie, Hangbo Zhao, Mattia Gazzola, John A. Rogers, and Rashid Bashir. Science Robotics 8.74 (2023): eadd1053.