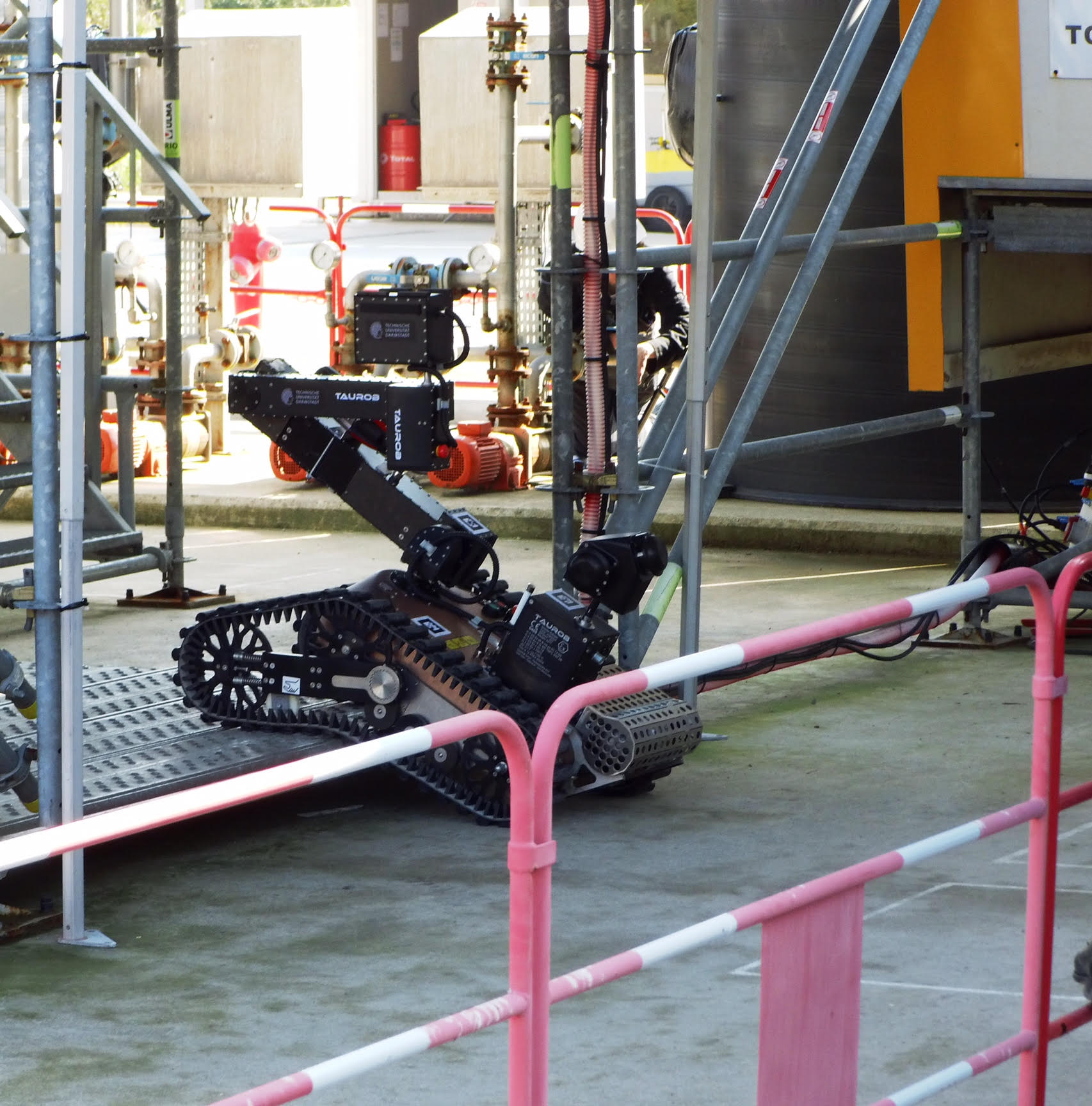
In a three-year competition, five international teams competed to develop a robot for routine-, inspection- and emergency operations on oil & gas sites. Frequently, gas leaks on oil drilling rigs can cause an increased risk to safety and the environment.
The acronym ARGOS stands for Autonomous Robot for Gas and Oil Sites, which suggests that the robot independently performs assigned tasks. If necessary, an operator can intervene at any time via a satellite-based connection from land and take control of the robot.
Photo credit: taurob GmbH and TU Darmstadt
The robot, developed by taurob GmbH together with TU Darmstadt, can read pointer instruments, fill level displays as well as valve positions using cameras and laser scanners. It can measure temperatures and gas concentrations, detect abnormal noises, obstacles and people around them, and safely manoeuvre on wet stairs. Adverse environmental conditions such as heavy rain, extreme temperatures and wind speeds do not pose a problem.
“Our robot is also the first fully automated inspection robot in the world that can be used safely in a potentially explosive atmosphere,” says Dr Lukas Silberbauer, who together with his colleague Matthias Biegl, founded the company taurob in 2010. The reason behind it, the robot is already fully ATEX certified so that it doesn’t trigger an explosion while operating in potentially explosive gases.
The Austrian company could capitalize on their knowledge obtaining this certification during their first project: a robot for firefighters.
“When we heard about Total’s contest, we immediately realized that this would be a great opportunity for us,” says Matthias Biegl.
Total has announced that it will use the new robots starting from 2020 on its oil drilling rigs.
The project was supported by FFG (Österreichische Forschungsförderungsgesellschaft) in the context of EUROSTARS (Co-financed by the EU).
For decades robotic exoskeletons were the subject of science fiction novels and movies. But in recent years, exoskeleton technology has made huge progress towards reality and exciting research projects and new companies have surfaced.
Typical applications of today’s exoskeletons are stroke therapy or support of users with a spinal cord injury, or industrial applications, such as back support for heavy lifting or power tool operation. And while the field is growing quickly, it is currently not easy to get involved. Learning materials or exoskeleton courses or classes are not widely available yet. This has made it difficult, as learning about exoskeletons is not possible by theory alone, but ideally, involves practical hands-on experience (feel it understand it). Unfortunately, the necessary exoskeleton hardware is expensive and not usually available to students or hobbyists wanting to explore the field.
This is the motivation behind the EduExo kit, a 3D-printable, Arduino-powered robotic exoskeleton now on Kickstarter. The goal of the project is to make exoskeleton technology available, affordable and understandable for anyone interested.
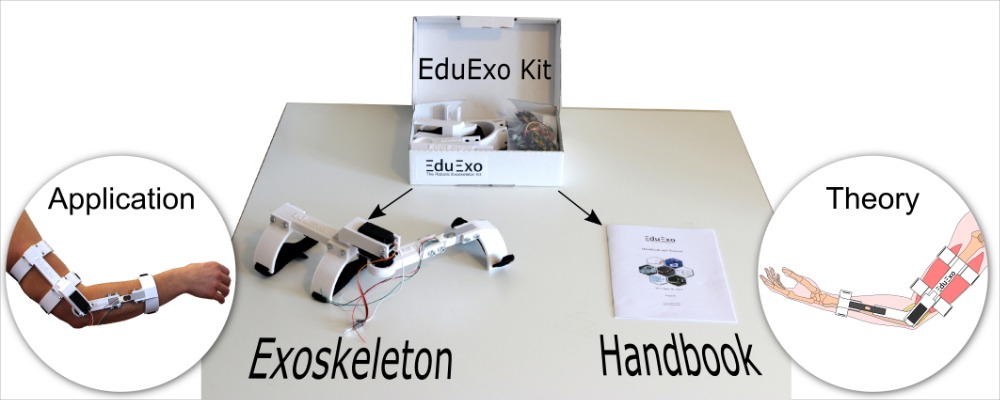
The EduExo is a robotic exoskeleton kit that you assemble and program yourself. The kit contains all the hardware you need to build an elbow exoskeleton. An accompanying handbook contains a tutorial that will guide you through the different assembly steps. In addition, the handbook provides background information on exoskeleton history, functionality and technology to offer a well-rounded introduction to the field.
The kit is being developed for the following users:
High school and college students who want to learn about robotic exoskeleton technology to prepare themselves for a career in exoskeletons and wearable robotics.
Makers and hobbyists who are looking for an interesting and entertaining project in a fascinating field.
Teachers and professors who want to set up exoskeleton courses or labs. The EduExo classroom set provides additional teaching material to facilitate the preparation of a course.
The main challenge of the project was to design exoskeleton hardware that is both cheap enough to be affordable for a high school student, but still complex enough to be an appropriate learning platform that teaches relevant and state of the art exoskeleton technology.
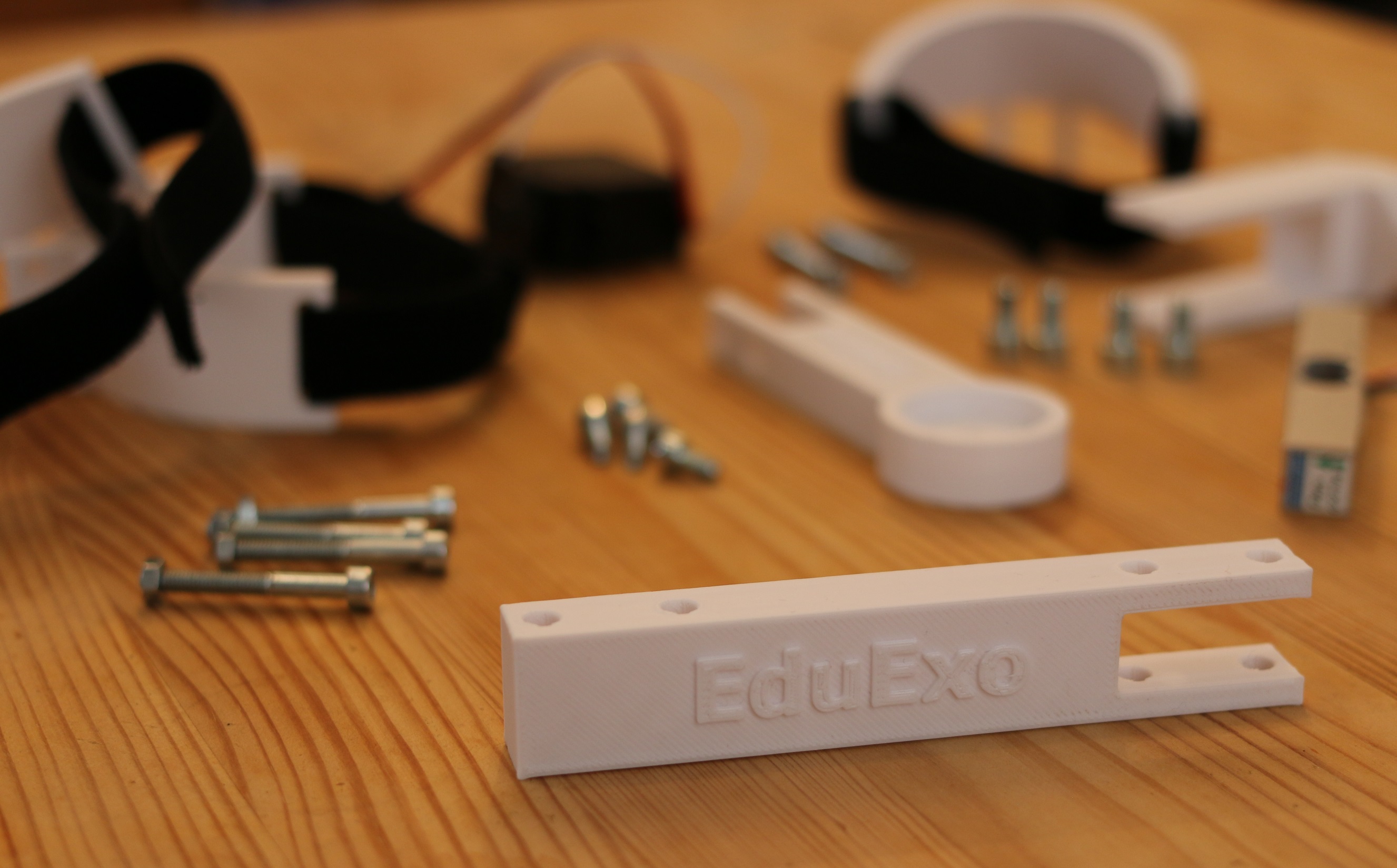
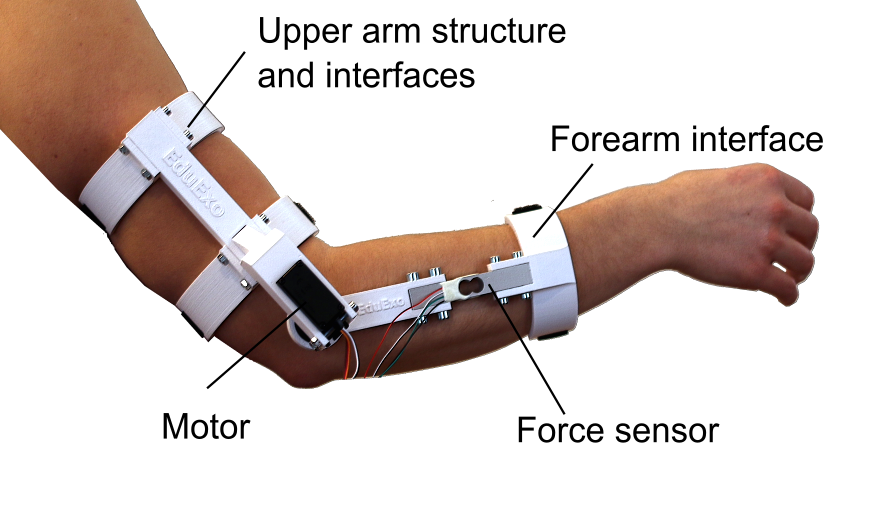
To lower the price, mostly off-the-shelf components are used. The hardware is a simple one degree of freedom design for the elbow joint. The EduExo box comes fully equipped and contains the handbook, exoskeleton structure, preassembled cuffs, an Arduino Microcontroller to control the device, a force sensor (and amplifier) to measures the human-robot interaction, a servo motor for the actuation and all the small parts needed to assemble and wire the exoskeleton.
The exoskeleton’s structure is 3D printable and users with access to a 3D printer can produce the parts themselves. Therefore, a maker edition is available for people who prefer doing everything themselves.
The software required to program the exoskeleton and to create computer games can be downloaded for free (Arduino IDE to program the Microcontroller and the Unity 3D game engine).
Despite the comparatively simple design, the EduExo will teach its users many interesting aspects of exoskeleton technology. This includes how the mechanical design resembles the human anatomy, how to connect the sensors and the electronics board, and how to design and program an exoskeleton control system. Further, it explains how to connect the exoskeleton to a computer and learn how to use it as a haptic device in combination with a self-made virtual reality simulation or computer game.
A ‘muscle control’ extension is offered separately that explains how to measure the exoskeleton user’s muscle activity and use it to control the device.
The development of the kit is currently in its final phase and it is already possible to order it through the ongoing Kickstarter campaign. Shipping is scheduled for August 2017.
Additional information can be found on the EduExo website: www.eduexo.com
A record number of teams submitted beautiful robot-created artwork for the second year of this 5-year worldwide competition. In total, there were 38 teams from 10 countries who submitted 200 different artworks!
Winners were determined based on a combination of public voting (over 3000 people with a Facebook account), judges consisting of working artists, critics, and technologists, and by how well the team met the spirit of the competition—that is, to create something beautiful using a physical brush and robotics, and to share what they learned with others. Learn more about the goals of the contest and its rules here.
Teams are encouraged to hang on to their artwork as there will be a physical exhibition of robotic-created artwork following next year’s competition (Summer 2018). This exhibition, most likely in Seattle, WA, will showcase winners of the 2017 and 2018 competition. The goal is to test Andy Warhol’s theory that “You know it’s ART, when the check clears.”
… and now, for the team winners of the 2017 Robot Art Competition:
This project from Columbia shows a high level of skill with brushstrokes. This, along with some deep learning algorithms, produces some lovely paintings from sources or scratch. When they used a photograph as the source they were able to create plenty of variation from the original and using a fluid medium to produce an atmospheric and open-ended visual experience. Much of their work had a painterly and contemporary presentation.
2nd Place—$25,000—CMIT ReART, Kasetsart University (Thailand)
King Bhumibol Adulyadej, by CMIT ReArt
Artists program this robot brushstroke by stroke, using a haptic recording system that generates volumes of data about the position of the brush and the forces being exerted. When re-played, reART will generate a perfect reproduction of the original strokes. Haptic recording and playback allows for remarkably high-quality inkbrush drawings
One of the aspects of a success commercial artist is to know their market. In this case, the students chose to paint the popular and recently deceased Thai King and therefore were able to get many students to vote for their team.
Hunter 2017 (Deep Learning Abstract Portraiture), by CloudPainter
All of this teams offerings are important. They are aiming at an interpretation of the optical properties of oil paint and applying them to deep learning. Spontaneous paint, “mosaicing” of adjacent tones, layering effects and the graphical interplay between paint strokes of varying textures, are all hand/eye, deeply neurally sophisticated aspects of oil painting that this team is trying to evince together with a robot.
This team also won the $5,000 prize for technical contribution.
4th Place $6000—e-David—University of Konstanz (Germany)
Homage to Jackson Pollock, by e-David
Using software that enables a collaboration between a human artist and roboticist, e-David mimics closely the approach a human painter would work on the canvas. An accompanying academic paper goes into deep detail about their approach to the project.
5th Place $4000—JACKbDU—New York University Shanghai (China)
WWF, by JACKbDU
Clean lines, interesting abstractions, both familiar and abstract subjects made me appreciate the overall body. In particularly, purely from aesthetics, these were found to be most compelling.
6th Place $2000—HEARTalion—Halmstad University (Sweden)
MISERABLE, by HEARTalion
If this body of work was exhibited at a gallery and I was told that the artist aimed to capture emotion through color, composition, and textures—I would buy (says one of our professional judges). The bold brush strokes, cool or warm templates to match the emotional quality expressed, all made sense—but felt alive. Loved them.
Loved the composition of both of these pieces. Both pieces bring an emotive calm with just a few colors, technique, and simplicity. Gem-style optical sketch, intimate scale, good formal balance, medium application and value panels.
This project uses the precision of a robot to take crude brush dabs to astonishing levels. By incorporating 3d scans into its image generation, this bot operates with a complete understanding of its subject; much like a human painter would have someone sitting for them. The team was kind enough to publish their 3d models and source code, so others can learn from and build off of their work.
9th Place $2000—CARP—Worcester Polytechnic Institute (USA)
Geometry No1, by CARP
Very good line. Lots of space in this drawing and central form is simultaneously dense and traversable. Good architectural reference in clear tooling, but enlivened by sumo type or Franz Kline strokes. If the shapes can continue to be explored while maintaining the hand/machine balance, this will remain a strong venue.
Slightly synesthetic. Beautiful and balanced fusion of technical and handmade, crystalline and organic.
10th Place $2000—BABOT—Massachusetts Institute of Technology (USA)
People in Space, by BABOT
MIT’s BABOT was able to produce this and other inspiring vistas.
In 2016, the European Union co-funded 17 new robotics projects from the Horizon 2020 Framework Programme for research and innovation. 16 of these resulted from the robotics work programme, and 1 project resulted from the Societal Challenges part of Horizon 2020. The robotics work programme implements the robotics strategy developed by SPARC, the Public-Private Partnership for Robotics in Europe (see the Strategic Research Agenda). Every week, euRobotics will publish a video interview with a project, so that you can find out more about their activities.
A wide variety of research and innovation themes are represented in the new projects: from healthcare via transportation, industrial- and logistics robotics to events media production using drones. Some deal with complex safety matters on the frontier where robots meet people, to ensure that no one comes to harm. Others will create a sustainable ecosystem in the robotics community, setting up common platforms supporting robotics development. One project deals exclusively with the potentially radical changes facing society with the rise of new autonomous technologies. The projects are either helping humans in their daily lives at home or at work, collaborating with humans to help them with difficult, strenuous tasks, or taking care of dangerous tasks, reducing the risk to humans.
The research and innovation projects focus on a wide variety of Robotics and Autonomous Systems and capabilities, such as navigation, human-robot interaction, recognition, cognition and handling. Many of these abilities can be transferable to other fields as well.
Advancing Anticipatory Behaviors in Dyadic Human-Robot Collaboration: An.Dy
Objective
Obj1. ANDY will develop the ANDYSUIT, a wearable technology for monitoring humans involved in whole-body physical interaction tasks. Obj2. Based on the ANDYSUIT, ANDY will generate ANDYDATASET, a collection of motion and force captures of humans involved in and collaboration tasks. Obj3. From ANDYDATASET, ANDY will develop ANDYMODEL, a set of models to describe human and robot behaviour when engaged in collaborative tasks. Obj4. With ANDYSUIT and ANDYMODEL, ANDY will develop ANDYCONTROL, a reactive and predictive control strategy for human-robot physical collaboration.
Expected impact
Impact on manufacturing domain: ANDY technologies support this objective in two ways: (1) by increasing productivity through more effective production and service processes in which the strength of humans and robots are optimally combined, and (2) by maintaining workers health until the age of retirement including reduced costs for health care and compensation. Impact on healthcare: the ANDYSUIT will open a completely new field for methodological analysis with the possibility of monitoring patients also outside the clinics.
Partners
FONDAZIONE ISTITUTO ITALIANO DI TECNOLOGIA
INSTITUT NATIONAL DE RECHERCHE EN INFORMATIQUE ET EN AUTOMATIQUE
INŠTITUT JOŽEF ŠTEFAN
DEUTSCHES ZENTRUM FÜR LUFT- UND RAUMFAHRT
XSENS TECHNOLOGIES BV
IMK AUTOMOTIVE GMBH
OTTO BOCK HEALTHCARE GMBH
ANYBODY TECHNOLOGY A/S
Coordinator: Francesco Nori
francesco.nori@iit.it
http://iron76.github.io
Instituto Italiano di Tecnologia – iCub Facility
Via Morego, 30
16163 Genova, Italy
Phone: (+39) 010 71 781 420
Fax: +39 010 71 70 817
Twitter: @AnDy_H2020
Google auto-complete controversy: The algorithm directed people looking for information about the Holocaust to neo-Nazi websites
These errors are not primarily caused by problems in the data that can make algorithms discriminatory, or their inability to improvise creatively. No, they stem from something more fundamental: the fact that algorithms, even when they are generating routine predictions based on non-biased data, will make errors. To err is algorithm.
The costs and benefits of algorithmic decision-making
We should not stop using algorithms simply because they make errors.[2] Without them, many popular and useful services would be unviable.[3] However, we need to recognise that algorithms are fallible, and that their failures have costs. This points at an important trade-off between more (algorithm-enabled) beneficial decisions and more (algorithm-caused) costly errors. Where lies the balance?
Economics is the science of trade-offs, so why not think about this topic like economists? This is what I have done ahead of this blog, creating three simple economics vignettes that look at key aspects of algorithmic decision-making.[4] These are the key questions:
Risk: when should we leave decisions to algorithms, and how accurate do those algorithms need to be?
Supervision: How do we combine human and machine intelligence to achieve desired outcomes?
Scale: What factors enable and constrain our ability to ramp-up algorithmic decision-making?
The two sections that follow give the gist of the analysis and its implications. The appendix at the end describes the vignettes in more detail (with equations!).
in an information rich world, attention becomes a scarce resource.
This applies to organisations as much as it does to individuals.
The ongoing data revolution risks overwhelming our ability to process information and make decisions, and algorithms can help address this. They are machines that automate decision-making, potentially increasing the number of good decisions that an organisation can make.[5] This explains why they have taken-off first in industries where the volume and frequency of potential decisions goes beyond what a human workforce can process.[6]
What drives this process? For an economist, the main question is how much value will the algorithm create with its decisions. Rational organisations will adopt algorithms with high expected values.
An algorithm’s expected value depends on two factors: its accuracy (the probability that it will make a correct decision), and the balance between the reward from a correct decision and the penalty from an erroneous one.[7] Riskier decisions (where penalties are big compared to rewards) should be made by highly accurate algorithms. You would not want a flaky robot running a nuclear power station, but it might be ok if it is simply advising you about what TV show to watch tonight.
2. Supervision: watch out
We could bring in human supervisors to check the decisions made by the algorithm and fix any errors they find. This makes more sense if the algorithm is not very accurate (supervisors do not spend a lot of time checking correct decisions), and the net benefits from correcting the wrong decisions (i.e., extra rewards plus avoided penalties) is high. Costs matter too. A rational organisation has more incentives to hire human supervisors if they do not get paid a lot, and if they are highly productive (i.e. it only takes a few of them to do the job).
Following from the example before, if a human supervisor fixes a silly recommendation in a TV website, this is unlikely to create a lot of value for the owner. The situation in a nuclear power station is completely different.
3. Scale: a race between machines and reality
What happens when we scale-up the number of algorithmic decisions? Are there any limits to its growth?
This depends on several things, including whether algorithms gain or lose accuracy as they make more decisions, and the costs of ramping-up algorithmic decision-making. In this situation, there are two interesting races going on.
1. There is a race between an algorithm’s ability to learn from the decisions it makes, and the amount of information that it obtains from new decisions. New machine learning techniques help algorithms ‘learn from experience’, making them more accurate as they make more decisions.[8] However, more decisions can also degrade an algorithm’s accuracy. Perhaps it is forced to deal with weirder cases, or new situations it is not trained to deal with.[9] To make things worse, when an algorithm becomes very popular (makes more decisions), people have more reasons to game it.
My prior is that the ‘entropic forces’ that degrade algorithm accuracy will win out in the end: no matter how much more data you collect, it is just impossible to make perfect predictions about a complex, dynamic reality.
2. The second race is between the data scientists creating the algorithms and the supervisors checking these algorithm’s decisions. Data scientists are likely to ‘beat’ the human supervisors because their productivity is higher: a single algorithm, or an improvement in an algorithm, can be scaled up over millions of decisions. By contrast, supervisors need to check each decision individually. This means that as the number of decisions increases, most of the organisation’s labour bill will be spent on supervision, with potentially spiralling costs as the supervision process gets bigger and more complicated.
What happens at the end?
When considered together, the decline in algorithmic accuracy and the increase in labour costs I just described are likely to limit the number of algorithmic decisions an organisation can make economically. But if and when this happens depends on the specifics of the situation.
Implications for organisations and policy
The processes I discussed above have many interesting organisational and policy implications. Here are some of them:
1. Finding the right algorithm-domain fit
As I said, algorithms making decisions in situations where the stakes are high need to be very accurate to make-up for high penalties when things go wrong.[10] On the flipside, if the penalty from making an error is low, even inaccurate algorithms might be up to the task.
For example, the recommendation engines in platforms like Amazon or Netflix often make irrelevant recommendations, but this is not a big problem because the penalty from these errors is relatively low – we just ignore them. Data scientist Hillary Parker picked up on the need to consider the fit between model accuracy and decision context a recent edition of the ‘Not So Standard Deviations’ podcast:
Most statistical methods have been tuned for the clinical trial implementation where you are talking about people’s lives and people dying with the wrong treatment, whereas in business settings the trade-offs are completely different.
One implication from this is that organisations in ‘low-stakes’ environments can experiment with new and unproven algorithms, including some with low-accuracy early on. As these are improved, they can be transferred to ‘high stake domains’. The tech companies that develop these algorithms often release them as open source software for others to download and improve, making these spill-overs possible.
2. There are limits to algorithmic decision-making in high stakes domains
Algorithms need to be applied much more carefully in domains where the penalties from errors are high, such as health or the criminal justice system, and when dealing with groups who are more vulnerable to algorithmic errors.[11] Only highly accurate algorithms are suitable for these risky decisions, unless they are complemented with expensive human supervisors who can find and fix errors. This will create natural limits to algorithmic decision-making: how many people can you hire to check an expanded number of decisions? Human attention remains a bottleneck to more decisions.
If policymakers want more and better use of algorithms in these domains, they should invest in R&D to improve algorithmic accuracy, encourage the adoption of high-performing algorithms from other sectors, and experiment with new ways of organising that help algorithms and their supervisors work better as a team.
Commercial organisations are not immune to some of these problems: YouTube has for example started blocking adverts in videos with less than ten thousand views. In those videos, the rewards from correct algorithmic ad-matching is probably low (they have low viewership) and the penalties could be high (many of these videos are of dubious quality). In other words, these decisions have low expected value, so YouTube has decided to stop making them. Meanwhile, Facebook just announced that it is hiring 3,000 human supervisors (almost a fifth of its current workforce) to moderate the content in its network. You could imagine how the need to supervise more decisions might put some brakes on its ability to scale up algorithmic decision-making indefinitely.
3. The pros and cons of crowdsourced supervision
One way to keep supervision costs low and coverage of decisions high is to crowdsource supervision to users, for example by giving them tools to report errors and problems. YouTube, Facebook and Google have all done this in response to their algorithmic controversies. Alas, getting users to police online services can feel unfair and upsetting. As Sarah T Roberts, a Law professor pointed out in a recent interview about the Facebook violent video controversy:
The way this material is often interrupted is because someone like you or me encounters it. This means a whole bunch of people saw it and flagged it, contributing their own labour and non-consensual exposure to something horrendous. How are we going to deal with community members who may have seen that and are traumatized today?
4. Why you should always keep a human in the loop
Even when penalties from error are low, it still makes sense to keep humans in the loop of algorithmic decision-making systems.[12] Their supervision provides a buffer against sudden declines in performance if (as) the accuracy of algorithms decreases. When this happens, the number of erroneous decisions detected by humans and the net benefit from fixing them increase. They can also ring the alarm, letting everyone know that there is a problem with the algorithms that needs fixing.[13]
This could be particularly important in situations where errors create penalties with a delay, or penalties that are hard to measure or hidden (say if erroneous recommendations result in self-fulfilling prophecies, or costs that are incurred outside the organisation).
There are many examples of this. In the YouTube advertising controversy, the big accumulated penalty from previous errors only became apparent with a delay, when brands noticed that their adverts were being posted against hate videos. The controversy with fake news after the US election is an example of hard to measure costs: algorithms’ inability to discriminate between real news and hoaxes creates costs for society, potentially justifying stronger regulations and more human supervision. Politicians have made this point when calling on Facebook to step up its fight against fake news in the run-up to the UK election:
Looking at some of the work that has been done so far, they don’t respond fast enough or at all to some of the user referrals they can get. They can spot quite quickly when something goes viral. They should then be able to check whether that story is true or not and, if it is fake, blocking it or alerting people to the fact that it is disputed. It can’t just be users referring the validity of the story. They [Facebook] have to make a judgment about whether a story is fake or not.
5. From abstract models to real systems
Before we use economic models to inform action, we need to define and measure model accuracy, penalties and rewards, changes in algorithmic performance due to environmental volatility, levels of supervision and their costs, and that is only the beginning.[14]
This is hard but important work that could draw on existing technology assessment and evaluation tools, including methods to quantify non-economic outcomes (e.g. in health).[15] One could even use rich data from an organisation’s information systems to simulate the impact of algorithmic decision-making and its organisation before implementing it. We are seeing more examples of these applications, such as the financial ‘regtech’ pilots that the European Commission is running, or the ‘collusion incubators’ mentioned in a recent Economist article on price discrimination.
Coda: Piecemeal social engineering in an age of algorithms
a practical and broadly applicable social-systems analysis [that] thinks through all the possible effects of AI systems on all parties [drawing on] philosophy, law, sociology, anthropology and science-and-technology studies, among other disciplines.
Calo and Crawford did not include economists in their list. Yet as this blog suggests, economics thinking has much to contribute to these important analyses and debates. Thinking about algorithmic decisions in terms of their benefits and costs, the organisational designs we can use to manage their downsides, and the impact of more decisions on the value that agorithms create can help us make better decisions about when and how to use them.
With every passing year, economics must become more and more about the design of the machines that mediate human social behaviour. A networked information system guides people in a more direct, detailed and literal way than does policy. Another way to put it is that economics must turn into a large-scale, systemic version of user interface design.
Designing organisations where algorithms and humans work together to make better decisions will be an important part of this agenda.
Acknowledgements
This blog benefited from comments from Geoff Mulgan, and was inspired by conversations with John Davies. The image above represents a precision-recall curve in a multi-label classification problem. It shows the propensity of a random forests classification algorithm to make mistakes when one sets different rules (probability thresholds) for putting observations in a category.
Appendix: Three economics vignettes about algorithmic decision-making
The three vignettes below are very simplified formalisations of algorithmic decision-making situations. My main inspiration was Human fallibility and economic organization, a 1985 paper by Joe Stiglitz and Raj Sah where the authors model how two organisational designs – hierarchies and ‘polyarchies’ (flat organisations) – cope with human error. Their analysis shows that hierarchical organisations where decision-makers lower in the hierarchy are supervised by people further up tend to reject more good projects, while polyarchies where agents make decisions independently from each other, tend to accept more bad projects. A key lesson from their model is that errors are inevitable, and the optimal organisational design depends on context.
Vignette 1: Algorithm says maybe
Let’s imagine an online video company that matches adverts with videos in its catalogue. This company hosts millions of videos so it would be economically inviable for it to rely on human labour to do the job. Instead, its data scientists develop algorithms to do this automatically. [16] The company looks for the algorithm that maximises the expected value of the matching decisions. This value depends on three factors: [17]
-Algorithm accuracy (a): The probability (between 0 and 1) that the algorithm will make the correct decision.[18]
-Decision reward (r): This is the reward when the algorithm makes the right decision
-Error penalty (p): This is the cost of making the wrong decision.
We can combine accuracy, benefit and penalty to calculate the expected value of the decision:
E = ar – (1-a)p [1]
This value is positive when the expected benefits from the algorithm’s decision outweigh the expected costs (or risks):
ar > (1-a)p [2]
Which is the same as saying that:
a/(1-a) > p/r [3]
The odds of making the right decision should be higher than the ratio between penalty and benefit.
Enter human
We can reduce the risk of errors by bringing a human supervisor into the situation. This human supervisor can recognise and fix errors in algorithmic decisions. The impact of this strategy on the expected value of a decision depends on two parameters:
-Coverage ratio (k): k is the probability that the human supervisor will check a decision by the algorithm. If k is 1, this means that all algorithmic decisions are checked by a human.
-Supervision cost (cs(k)): this is the cost of supervising the decisions of the algorithm. The cost depends on the coverage ratio k because checking more decisions takes time.
The expected value of an algorithmic decision with human supervision is the following:[19]
Es = ar + (1-a)kr – (1-a)kp – cs(k) [4]
This equation picks up the fact that some errors are detected and rectified, and others are not. We subtract [3] from [4] to obtain the extra expected value from supervision. After some algebra, we get this.
(r+p)(1-a)k > cs(k) [5]
Supervision only makes economic sense when its expected benefit (which depends on the probability that the algorithm has made a mistake, that this mistake is detected, and the net benefits from flipping a mistake into a correct decision) is larger than the cost of supervision.
Scaling up
Here, I consider what happens when we start increasing n, the number of decisions being made by the algorithm.
The expected value is:
E(n) = nar + n(1-a)kr – n(1-a)(1-k)p [6]
And the costs are C(n)
How do these things change as n grows?
I make some assumptions to simplify things: the organisation wants to hold k constant, and the rewards r and penalties p remain constant as n increases.[20]
This leaves us with two variables that change as n increases: a and C.
I assume that algorithmic accuracy a declines with the number of decisions because the processes that degrade accuracy are stronger than those that improve it
I assume that C, the production costs, only depend on the labour of data scientists and supervisors. Each of these two occupations gets paid a salary wds and ws.
Based on this, and some calculus, we get the changes in expected benefits as we make more decisions as:
∂E(n)/∂(n) = r + (a+n(∂a/∂n))*(1-k)(r+p) - p(1-k) [7]
This means that as more decisions are made, the aggregated expected benefits grow in a way that is modified by changes in the marginal accuracy of the algorithm. On the one hand, more decisions mean scaled up benefits from more correct decisions. On the other, the decline in accuracy generates an increasing number of errors and penalties. Some of these are offset by human supervisors.
This is what happens with costs:
∂C/∂n = (∂C/∂Lds)(∂Lds/∂n) + (∂C/dLs)(∂Ls/dn) [8]
As the number of decisions increases, costs grow because the organisation has to recruit more data scientists and supervisors.
[8] is the same as saying:
∂C/dn = wds/(∂Lds/dn) + ws/zs/(∂Ls/∂n) [9]
The labour costs of each occupation are directly related to its salary, and inversely related to its marginal productivity. If we assume that data scientists are more productive than supervisors, this means that most of the increases in costs with n will be caused by increases in the supervisor workforce.
The expected value (benefits minus costs) from decision-making for the organisation is maximised with an equilibrium number of decisions ne where the marginal value of an extra decision equals its marginal cost:
r + (a+nda/dn)(1-k)(r+p) - p(1-k) = wds/(∂Lds/∂n) + ws/zs/(∂Ls/∂n) [10]
Extensions
Above, I have kept things simple by making some strong assumptions about each of the situations being modelled. What would happen if we relaxed these assumptions?
Here are some ideas:
Varieties of error
First, the analysis does not take into account that different types of errors (e.g. false positives and negatives, errors made with different degrees of certainty etc.) could have different rewards and penalties. I have also assumed certainty in rewards and penalties, when it would be more realistic to model them as random draws from probability distributions. This extension would help incorporate fairness and bias into the analysis. For example, if errors are more likely to affect vulnerable people (who suffer higher penalties), and these errors are less likely to be detected, this could increase the expected penalty from errors.
Humans are not perfect either
All of the above assumes that algorithms err but humans do not. This is clearly not the case. In many domains, algorithms can be a desirable alternative to humans with deep-rooted biases and prejudices. In those situations, human’s ability to detect and address errors is impaired, and this reduces the incentives to recruit them (this is the equivalent to a decline in their productivity). Organisations deal with all this by investing on technologies (e.g. crowdsourcing platforms) and quality assurance systems (including extra layers of human and algorithmic supervision) that manage the risks of human and algorithmic fallibility.
Scaling up rewards and penalties
Before, I assumed that the marginal penalties and rewards remain constant as the number of algorithmic decisions increase. This need not be the case. The table below shows examples of situations where these parameters change with the number of decisions being made:
Increases with more decisions
Decreases with more decisions
Rewards
The organisation gains market power, or is able to use price discrimination in more transactions
The organisation runs out of valuable decisions to make.
Penalties
The organisation becomes more prominent and its mistakes receive more attention
Users get accustomed to errors
Getting an empirical handle on these processes is very important, as they could determine if there is a natural limit to the number of algorithmic decisions that an organisation can make economically in a domain or market, with potential implications for its regulation.
Endnotes
[1] I use the term ‘algorithm’ in a restricted sense, to refer to technologies that turn information into predictions (and depending on the system receiving the predictions, decisions). There are many processes to do this, including rule-based systems, statistical systems, machine learning systems and Artificial Intelligence (AI). These systems vary on their accuracy, scalability, interpretability, and ability to learn from experience, so their specific features should be considered in the analysis of algorithmic trade-offs.
[2] One could even say that machine learning is the science that manages trade-offs caused by the impossibility of eliminating algorithmic error. The famous ‘bias-variance’ trade off between fitting a model to known observations and predicting unknown ones is a good example of this.
[3] Some people would say that personalisation is undesirable because it can lead to discrimination and ‘filter bubbles’, but that is a question for another blog post.
[4] Dani Rodrik’s ‘Economics Rules’ makes a compelling case for models as simplistic but useful formalisations of complex reality.
[5] In a 2016 Harvard Business Review article, Ajay Agrawal and colleagues sketched out an economic analysis of machine learning as a technology that lowers the costs of prediction. My way of looking at algorithms is similar because predictions are inputs into decision-making.
[6] This includes personalised experiences and recommendations in e-commerce and social networking sites, or fraud detection and algorithmic trading in finance.
[7] For example, if YouTube shows me an advert which is highly relevant to my interests, I might buy the product, and this generates income for the advertiser, the video producer and YouTube. If it shows me a completely irrelevant or even offensive advert, I might stop using YouTube, or kick up a fuss in my social network of choice.
[8] Reinforcement learning builds agents that use the rewards and penalties from previous actions to make new decisions.
[9] This is what happened with the Google FluTrends system used to predict flu outbreaks based on google searches – people changed their search behaviour, and the algorithm broke down.
[10] In many cases, the penalties might be so high that we decide that an algorithm should never be used, unless it is supervised by humans.
[11] Unfortunately, care is not always taken when implementing algorithmic systems in high-stakes situations. Cathy O’Neil’s ‘Weapons of Maths Destruction’ gives many examples of this, going from the criminal justice system to university admissions.
[12] Mechanisms for accountability and due process are another example of human supervision.
[13] Using Albert Hirschmann’s model of exit, voice and loyalty, we could say that supervision plays the role of ‘voice’, helping organisations detect a decline in quality before users begin exiting.
[14] The appendix flags up some of my key assumptions, and suggests extensions.
[15] This includes rigorous evaluation of algorithmic decision-making and its organisation using Randomised Controlled Trial methods like those proposed by Nesta’s Innovation Growth Lab.
[16] This decision could be based on how well similar adverts perform when matched with different types of videos, on demographic information about the people who watch the videos, or other things.
[17] The analysis in this blog assumes that the results of algorithmic decisions are independent from each other. This assumption might be violated in situations where algorithms generate self-fulfilling prophecies (e.g. logically, a user is more likely to click an advert she is shown that one she is not). This is a hard problem to tackle, but researchers are developing methods based on randomisation of algorithmic decisions to address it.
[18] This does not distinguish between different types of error (e.g. false positives and false negatives). I come back to this at the end.
[19] Here, I am assuming that human supervisors are perfectly accurate. As we know from behavioural economics, this is a very strong assumption. I consider this issue at the end.
[20] I consider the implications of making different assumptions about marginal rewards and penalties at the end.
This post was originally published on Nesta. Click here to view the original.
An Imperial Snowtrooper inspects a competitor’s entry at the 2017 MIT Mechanical Engineering 2.007 Student Design Final Robot Competition. Photo: Tony Pulsone
Thursday night, dozens of robots designed and built by undergraduates in a mechanical engineering class endured hours of intense, boisterous, and often jubilant competition as they scrambled to rack up points in one-on-one clashes on special “Star Wars”-themed playing arenas.
As has often happened in these contests — which have been going on, and constantly evolving, since 1970 — the ultimate winner in the single-elimination tournament was not the one that’d most consistently racked up the highest scores all evening. Rather, it was a high-scoring bot that triumphed when its competitor missed a crucial scoring opportunity because its starting position was just slightly out of alignment.
The class, 2.007 (Design and Manufacturing I), which has 165 mostly sophomore students, begins by giving each student an identical kit of parts, from which they each have to create a robot to carry out a variety of tasks to score points. This year, in a nod to the 40th anniversary of the first “Star Wars” film, released in 1977, the robots crawled around and over a replica of a “Star Wars” X-wing Starfighter. Students could earn points by pulling up a sliding frame to rescue prisoners trapped in carbonite; by dumping Imperial stormtroopers into a trash trench; by activating a cantina band; or by spinning up one or both of two large cylindrical thrusters on the wings. Students could choose which tasks to have their robot try to accomplish, and had just one semester to design, test, and operate their bot.
The devices could be pre-programmed to carry out set tasks, but could also be manually controlled through a radio-linked controller. As in past years, the open-ended nature of the assignment — and the variety of different ways to score — led to a wide range of strategies and designs, spanning from tall towers that would extend by telescoping out or with hinged sections, to elevator-like lifting devices, to small and nimble bots that scurried around to carry out multiple tasks, to an array of arms and devices for grasping or turning the different pieces. They sported names like Dodocopter, Bonnie and Clyde, Pitfall, Torque Toilet, Spinit to Winit, and Nicki Spinaj.
Students could earn extra points by accomplishing any of the tasks during an initial period when the robot had to perform autonomously, before the start of a manually remote-controlled round. The students were allowed to create multiple robots to carry out different tasks, as long as they were all made from the basic kit of parts, and all fit within a designated starting area. Most of the students opted to build two devices, and some even made three.
Second-place finisher Richard Moyer, with his small but powerful and robust robot called Tornado, consistently scored 960.5 points in every round (the highest score achieved by any of the bots), by spinning both the lower and upper thrusters to their maximum speeds — and by using the lower thruster during the high-scoring autonomous period. But on the final matchup, Tornado was just slightly out of place in the starting box, and missed the thruster, losing out on that big initial score.
The robot used a simple but reliable design, which sported a single horizontally-mounted drive wheel that it used to spin both the lower and upper thrusters, and also to activate an elevator mechanism that carried it from one wing to the other. It was “like the Swiss army knife of robots,” thanks to this multifunction device, said Sangbae Kim, an associate professor of mechanical engineering and co-instructor of the course, who was dressed as the “Star Wars” wookie, Chewbacca.
The grand-prize winner, Tom Frejowski, also built a compact, powerful robot that concentrated on the spinning task, and scored 640 in the final round to take home the top trophy (a replica of the MIT dome). Frejowski’s robot, in order to ensure that it made a straight shot from the starting position to the thruster to line up just right to spin the heavy cylinder, used a single motor to drive both of its front wheels, which helped him earn consistent high scores. “That’s how he goes dead straight every time,” said co-instructor Amos Winter, an assistant professor of mechanical engineering, who was dressed as Darth Vader and shared the emcee duties with Kim.
During the tournament, which took place in the Johnson Ice Rink, all of the course teachers and assistants were dressed in various “Star Wars” costumes, and a packed audience of fellow students, families, and visitors of all ages cheered their encouragement with great enthusiasm. During a break, each of the teaching assistants was presented with a special memento: a beaver-cut twig from a beaver dam in Nova Scotia, symbolizing MIT’s beaver mascot, and nature’s original mechanical engineer.
Echoing the sentiments of many students in the class, sophomore James Li said of the class in a pre-taped video: “I had a bit of building experience, but I never had to design and build anything of this complexity. … It was a great experience.”
RoboCup is an international scientific initiative with the goal to advance the state of the art of intelligent robots. Established in 1997, the original mission was to field a team of robots capable of winning against the human soccer World Cup champions by 2050.
The competition has now grown into an international movement with a variety of leagues that go beyond soccer. Teams compete to make robots for rescue missions, the home, and industry. And it’s not just researchers, kids also have their own league. Last year, almost 3,000 participants and 1,200 robots competed.
To celebrate 20 years of RoboCup, the Federation is launching a video series featuring each of the leagues with one short video for those who just want a taster, and one long video for the full story. Robohub will be featuring one league every week leading up to RoboCup 2017 in Nagoya, Japan.
This week, we take a whirlwind tour of the RoboCup competition, spanning all the leagues. You’ll hear about the history and ambitions of RoboCup from the trustees, and inspiring teams from around the world.
Short Version
Long Version
Can’t wait to watch the rest? You can view all the videos on the RoboCup playlist below:
https://www.youtube.com/playlist?list=PLEfaZULTeP_-bqFvCLBWnOvFAgkHTWbWC
Please spread the word! and if you would like to join a team, check here for more information.
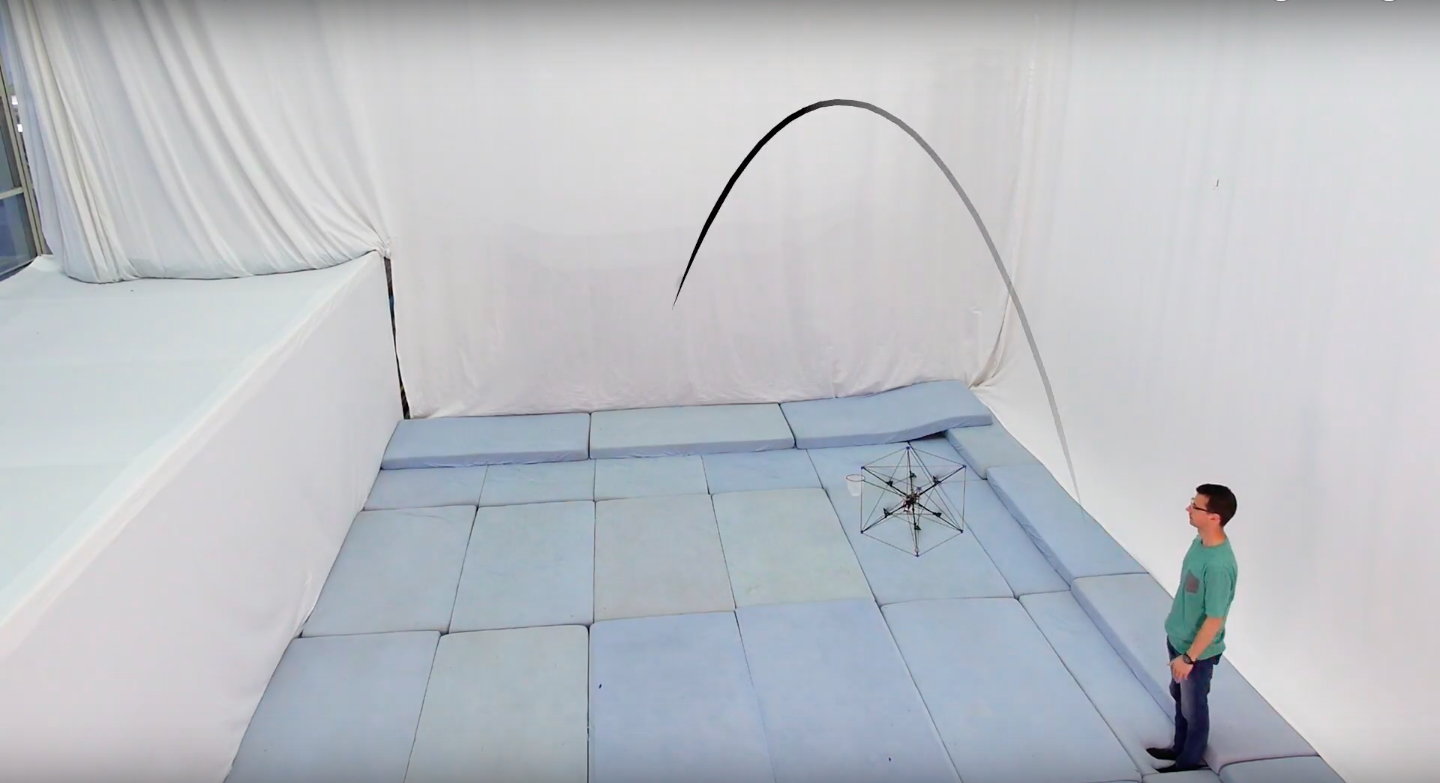
We have developed a computationally efficient trajectory generator for six degrees-of-freedom multirotor vehicles, i.e. vehicles that can independently control their position and attitude. The trajectory generator is capable of generating approximately 500’000 trajectories per second that guide the multirotor vehicle from any initial state, i.e. position, velocity and attitude, to any desired final state in a given time. In this video, we show an example application that requires the evaluation of a large number of trajectories in real time.
Multirotor vehicle
The multirotor vehicle used in the demonstration is an omni-directional eight-rotor vehicle. Its unique actuator configuration gives it full force and torque authority in all three dimensions, allowing it to fly novel maneuvers. For more details, please refer to the Youtube video or the research paper: “Design, Modeling and Control of an Omni-Directional Aerial Vehicle”, IEEE International Conference on Robotics and Automation (ICRA), 2016.
Researchers
Dario Brescianini and Raffaello D’Andrea
Institute for Dynamic Systems and Control (IDSC), ETH Zurich, Switzerland – http://www.idsc.ethz.ch
This work is supported by and builds upon prior contributions by numerous collaborators in the Flying Machine Arena project. See the list here. This research was supported by the Swiss National Science Foundation (SNSF).
Robo Done, the robotic academy franchise for kids from Osaka, Japan, celebrated Japan’s Day of the Children on the 5th of May at their annual event, Robot Festival 2017 or RoboFes. The event welcomed over 1,000 attendees, including children and their parents.
This was the 2nd time Robo Done has celebrated the festival. In only one year, the number of attendees has increased threefold (350 attendees in 2016 to over 1,012 in 2017). It was celebrated in the KANDAI MeRise Campus of the Kansai University in Osaka, Japan and has become the biggest event at the campus.
The main activity was the Robot Contest, using LEGO Mindstorm, with morning and afternoon leagues. Over 200 children — from 6 years and up — participated in the championship. The kids built robots in pairs and programmed their creations, repeating the process of trial-and-error against a time limit. Several IT and robot related companies had booths, as well as, students of the university, which offered a variety of activities for the kids to enjoy.
Robo Done will hold RoboFes again in 2018, hoping to inspire even more kids to enjoy robotics and programming. We hope RoboFes will become a regular event during Japan’s “Golden Week!”
“The new frontier is learning how to design the relationships between people, robots, and infrastructure,” says David Mindell, the Dibner Professor of the History of Engineering and Manufacturing, and a professor of aeronautics and astronautics. “We need new sensors, new software, new ways of architecting systems.” Photo: Len Rubenstein
Science and technology are essential tools for innovation, and to reap their full potential, we also need to articulate and solve the many aspects of today’s global issues that are rooted in the political, cultural, and economic realities of the human world. With that mission in mind, MIT’s School of Humanities, Arts, and Social Sciences has launched The Human Factor — an ongoing series of stories and interviews that highlight research on the human dimensions of global challenges. Contributors to this series also share ideas for cultivating the multidisciplinary collaborations needed to solve the major civilizational issues of our time.
David Mindell, the Frances and David Dibner Professor of the History of Engineering and Manufacturing and Professor of Aeronautics and Astronautics at MIT, researches the intersections of human behavior, technological innovation, and automation. Mindell is the author of five acclaimed books, most recently “Our Robots, Ourselves: Robotics and the Myths of Autonomy” (Viking, 2015). He is also the co-founder of Humatics Corporation, which develops technologies for human-centered automation. SHASS Communications recently asked him to share his thoughts on the relationship of robotics to human activities, and the role of multidisciplinary research in solving complex global issues.
Q: A major theme in recent political discourse has been the perceived impact of robots and automation on the United States labor economy. In your research into the relationship between human activity and robotics, what insights have you gained that inform the future of human jobs, and the direction of technological innovation?
A: In looking at how people have designed, used, and adopted robotics in extreme environments like the deep ocean, aviation, or space, my most recent work shows how robotics and automation carry with them human assumptions about how work gets done, and how technology alters those assumptions. For example, the U.S. Air Force’s Predator drones were originally envisioned as fully autonomous — able to fly without any human assistance. In the end, these drones require hundreds of people to operate.
The new success of robots will depend on how well they situate into human environments. As in chess, the strongest players are often the combinations of human and machine. I increasingly see that the three critical elements are people, robots, and infrastructure — all interdependent.
Q: In your recent book “Our Robots, Ourselves,” you describe the success of a human-centered robotics, and explain why it is the more promising research direction — rather than research that aims for total robotic autonomy. How is your perspective being received by robotic engineers and other technologists, and do you see examples of research projects that are aiming at human-centered robotics?
A: One still hears researchers describe full autonom as the only way to go; often they overlook the multitude of human intentions built into even the most autonomous systems, and the infrastructure that surrounds them. My work describes situated autonomy, where autonomous systems can be highly functional within human environments such as factories or cities. Autonomy as a means of moving through physical environments has made enormous strides in the past ten years. As a means of moving through human environments, we are only just beginning. The new frontier is learning how to design the relationships between people, robots, and infrastructure. We need new sensors, new software, new ways of architecting systems.
Q: What can the study of the history of technology teach us about the future of robotics?
A: The history of technology does not predict the future, but it does offer rich examples of how people build and interact with technology, and how it evolves over time. Some problems just keep coming up over and over again, in new forms in each generation. When the historian notices such patterns, he can begin to ask: Is there some fundamental phenomenon here? If it is fundamental, how is it likely to appear in the next generation? Might the dynamics be altered in unexpected ways by human or technical innovations?
One such pattern is how autonomous systems have been rendered less autonomous when they make their way into real world human environments. Like the Predator drone, future military robots will likely be linked to human commanders and analysts in some ways as well. Rather than eliding those links, designing them to be as robust and effective as possible is a worthy focus for researchers’ attention.
Q: MIT President L. Rafael Reif has said that the solutions to today’s challenges depend on marrying advanced technical and scientific capabilities with a deep understanding of the world’s political, cultural, and economic realities. What barriers do you see to multidisciplinary, sociotechnical collaborations, and how can we overcome them?
A: I fear that as our technical education and research continues to excel, we are building human perspectives into technologies in ways not visible to our students. All data, for example, is socially inflected, and we are building systems that learn from those data and act in the world. As a colleague from Stanford recently observed, go to Google image search and type in “Grandma” and you’ll see the social bias that can leak into data sets — the top results all appear white and middle class.
Now think of those data sets as bases of decision making for vehicles like cars or trucks, and we become aware of the social and political dimensions that we need to build into systems to serve human needs. For example, should driverless cars adjust their expectations for pedestrian behavior according to the neighborhoods they’re in?
Meanwhile, too much of the humanities has developed islands of specialized discourse that is inaccessible to outsiders. I used to be more optimistic about multidisciplinary collaborations to address these problems. Departments and schools are great for organizing undergraduate majors and graduate education, but the old two-cultures divides remain deeply embedded in the daily practices of how we do our work. I’ve long believed MIT needs a new school to address these synthetic, far-reaching questions and train students to think in entirely new ways.
Interview prepared by MIT SHASS Communications
Editorial team: Emily Hiestand (series editor), Daniel Evans Pritchard
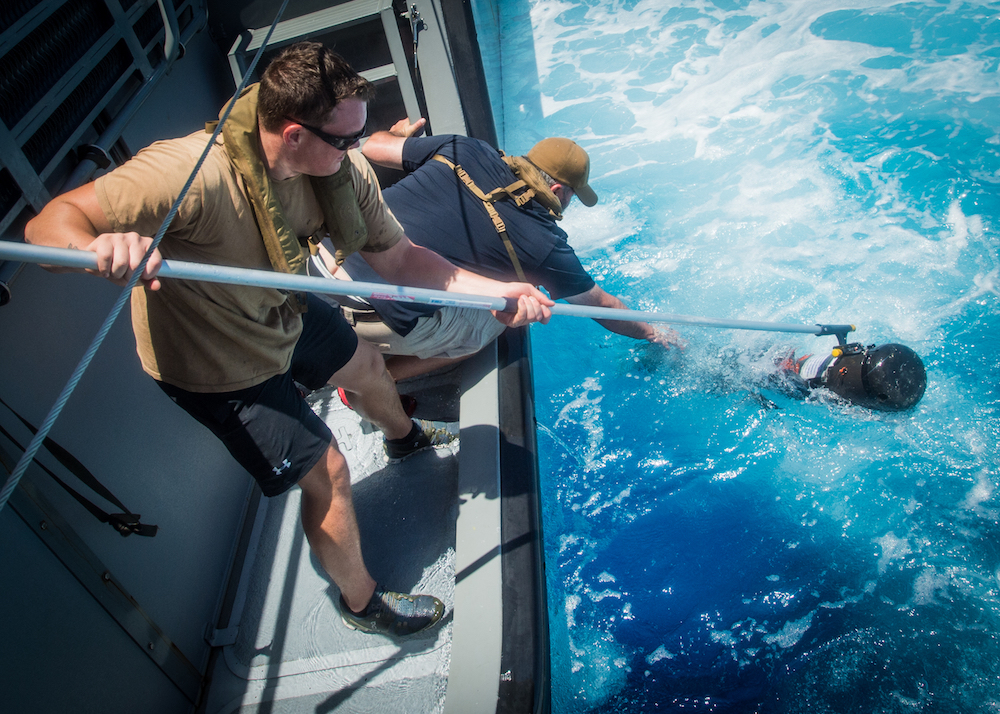
Sailors assigned to Explosive Ordnance Disposal Mobile Unit 5 (EODMU5) Platoon 142 recover an unmanned underwater vehicle onto a Coastal Riverine Group 1 Detachment Guam MK VI patrol boat in the Pacific Ocean May 10, 2017. Credit: Mass Communication Specialist 1st Class Torrey W. Lee/ U.S. Navy
May 8, 2017 – May 14, 2017
If you would like to receive the Weekly Roundup in your inbox, please subscribe at the bottom of the page.
News
The International Civil Aviation Organization announced that it plans to develop global standards for small unmanned aircraft traffic management. In a statement at the Association of Unmanned Vehicle Systems International’s Xponential trade conference, the United Nations agency said that as part of the initiative it has issued a Request for Information on air traffic management systems for drones. (GPS World)
Virginia Governor Terry McAuliffe has created a new office dedicated to drones and autonomous systems. According to Gov. McAuliffe, the Autonomous Systems Center for Excellence will serve as a “clearinghouse and coordination point” for research and development programs related to autonomous technologies. (StateScoop)
Commentary, Analysis, and Art
At the Telegraph, Alan Tovey writes that the U.K.’s exit from the European Union is unlikely to affect cross-channel cooperation on developing fighter drones.
Nautilus, a California startup, is developing a cargo drone that could carry thousands of pounds of goods over long distances. (Air & Space Magazine)
Drone maker Pulse Aerospace unveiled two new rotorcraft drones for military and commercial applications, the Radius 65 and the Vapor 15. (Press Release)
Piaseki Aerospace will likely submit its ARES demonstrator drone for the U.S. Marine Corps’ Unmanned Expeditionary Capabilities program. (FlightGlobal)
Defense firm Kratos confirmed that it has conducted several demonstration flights of a high performance jet drone for an undisclosed customer. (FlightGlobal)
Technology firm Southwest Research Institute has been granted a patent for a system by which military drones can collaborate with unmanned ground vehicles. (Unmanned Aerial Online)
The U.S. Army is interested in developing a mid-size unmanned cargo vehicle that could carry up to 800 pounds of payload. (FlightGlobal)
A drone flying over a bike race in in Rancho Cordova, California crashed into a cyclist. (Market Watch)
Meanwhile, a consumer drone crashed into a car crossing the Sydney Harbor Bridge in Australia. It is the second time a drone has crashed at the site of the bridge in the past nine months. (Sydney Morning Herald)
Insurance company Travelers has trained over 150 drone operators to use drones for insurance appraisals over properties. (Insurance Journal)
A Latvian technology firm used a large multirotor drone to carry a skydiver to altitude before he parachuted back down to earth. (Phys.org)
Clear Flight Solutions and AERIUM Analytics are set to begin integrating the Robird drone system, a falcon-like drone that scares birds away from air traffic, at Edmonton International Airport. (Unmanned Systems Technology)
Industry Intel
The U.S. Army awarded General Atomics Aeronautical Systems a $221.6 million contract modification for 20 extended range Gray Eagle drones and associated equipment. (DoD)
The U.S. Air Force awarded General Electric a $14 million contract for work that includes the Thermal Management System for unmanned aircraft. (DoD)
Turkish Aerospace Industries will begin cooperating with ANTONOV Company on the development of unmanned systems. (Press Release)
Aker, a company that develops drones for agriculture, won $950,000 in funding from the Clean Energy Trust Challenge. (Chicago Tribune)
For updates, news, and commentary, follow us on Twitter. The Weekly Drone Roundup is a newsletter from the Center for the Study of the Drone. It covers news, commentary, analysis and technology from the drone world. You can subscribe to the Roundup here.
JD Claridge’s story epitomizes the current state of the drone industry. Claridge, founder of xCraft, is best known for being the first contestant on Shark Tank to receive money from all the Sharks – even Kevin O’Leary! Walking the floor of Xponential 2017, the annual convention of the Association for Unmanned Vehicle Systems Integration (AUVSI), Claridge remarked to me how the drone industry has grown up since his TV appearance.
Claridge has gone from pitching cellphone cases that turn into drones (aka phonedrone) to solving mission critical problems. The age of fully autonomous flight is near and the drone industry is finally recovering from the hangover of overhyped Kickstarter videos (see Lily drone’s $34 million fraud). xCraft’s pivot to lightweight, power efficient, enterprise drones is an example of this evolved marketplace. During the three days of Xponential 2017, several far-reaching announcements were made between stalwarts of the tech industry and aviation startups. Claridge introduced me to his new partner, Rajant, which is a leader in industrial wireless networks. xCraft’s latest models utilize Rajant’s mesh networks to launch swarms of drones with one controller. More drones flying simultaneously enables users to maximize the flight time limitations of lithium batteries by covering greater areas within a single mission.
Bob Schena, Rajant’s CEO, said, “Rajant’s network technology now makes it possible for one pilot to operate many aircrafts concurrently, with flight times of 45 minutes. We’re pleased to partner with xCraft and bring more intelligence, mobility and autonomy to UAV communication infrastructures covering greater aerial distances while supporting various drone payloads.”
The battery has been the Achilles heel of the small drone industry since inception. While large winged craft relies heavily on fossil fuels, multirotor battery-operated drones have been plagued with shorter missions of under 45 minutes. Innovators like Claridge are leading the way for a new wave of creative solutions:
Solar Powered Wings
Solar Powered Wings
Airbus showcased its Zephyr drone products or HAPS (High Altitude Pseudo-Satellite) UAVs using solar-winged craft for power. Zephyr UAVs can fly for months at a time, saving thousands of tons of fuel. The HAPS also offers a number of lightweight payload options from voice communications to persistent internet to real-time surveillance. Airbus was not the only solar solution on display; there were a handful of Chinese upstarts and solar cell purveyors for retrofitting existing aircrafts.
Hybrid Fuel Solutions
In the Startup Pavilion, William Fredericks of the Advanced Aircraft Company (AAC) demoed a novel technology using a hybrid of diesel fuel and lithium batteries with flexible fixed wings and multirotors, resulting in over 3 hours of flying time. AAC’s prototype, the Hercules (above) is remarkably lightweight and fast. Fredricks is an aircraft designer by trade with 12 designs flying in the air, including NASA’s Greased Lightning that looks remarkably similar to Boeing’s Osprey. The Hercules is available for sale on the company’s website for multiple use cases, including: agricultural, first responders, and package delivery. It is interesting to note that a few rows from Frederick’s booth was his former employer, NASA, promoting their new Autonomy Incubator for “intelligent flight systems” and its “autonomy innovation lab,” (definitely an incubator to watch).
Vertical Take Off & Landing
In addition to hybrid fuel strategies, entrepreneurs are also rethinking the launch procedures. AAC’s Hercules and XCraft’s commercial line of drones vertically takeoff to reduce wind resistance and maximize energy consumption. Australian Startup Iridium Dynamics takes this approach to a new level with astonishing results. Its winged craft, Halo, uses a patent-pending “hover thrust” of its entire craft so its wings actually create the vertical lift to hover with minimal power. The drone also has two rotors to fly horizontally. According to Dion Gonano, Control Systems Engineer, it can fly for over 2 hours. The Halo also lands vertically into a stationary mechanical arm. While the website lists a number of commercial applications for this technology, it was unclear in my discussions with Gonano if they have deployed this technology in real tests.
New Charging Efficiencies
Prior to Xponential, Seattle-based WiBotic announced the closing of its $2.5 seed round to fund its next generation of battery charging technologies. The company has created a novel approach to wireless inductive charging for robotics. Its wireless inductive charging platform includes a patent-pending auto detect feature that can begin recharging once the robot enters the proximity of the base station, even during flight. According to Dr. Ben Waters, (CEO), its charge is faster than traditional solutions presently on the market. Dr. Waters demonstrated for me its suite of software tools that monitor battery performance, providing clients with a complete power management analytics platform. WiBotic is already piloting its technology with leading commercial customers in the energy and security sectors. WiBotic is the first inductive charging platform; other companies have created innovating battery-swapping techniques. Airobotics unique drone storage box that is deployed currently at power plants in Israel, includes a robotic arm, housed inside, that services the robot post flight by switching out the payload and battery:
Reducing Payload Weight
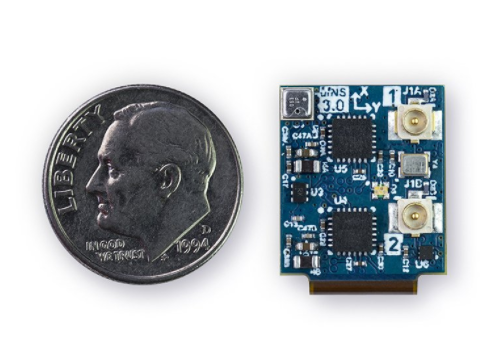
In addition to aircraft design, payload weight is a big factor of battery drain. A growing trend within the industry is miniaturizing the size and cost of the components. Ultimately, the mission of a drone is directly related to the type of payload from cameras for collecting images to precise measurements using Light Detection and Ranging sensors (or Lidar). Lidar is typically deployed in autonomous vehicles to provide the most precise position for the robot in a crowded area, like a self-driving car on the road. However, Lidar is currently extremely expensive and large for many multirotor surveys. Chris Brown of Z-Senz, a former scientist with the The National Institute of Standards and Technology (NIST), hopes to change the landscape of drones with his miniaturized Lidar sensor. Brown’s reduced sensor, SKY1, offers major advantages for size, weight, and power consumption without losing accuracy of high distance sensing. A recent study estimates the Lidar market is expected to exceed $5 billion by 2022, with Velodyne and Quanergy already gaining significant investment. Z-Senz is aiming to be commercially available by 2018.
Lidar is not the only measuring methodology, Global Positioning Solutions (GPS) have been deployed widely. Two of the finalists of the Xponetial Startup Showdown were startups focused on reducing GPS chip sizes and increasing functionality. Inertial Sense has produced a chip the size of a dime that is capable of housing an Inertial Measurement Unit (IMU), Attitude Heading Reference System (AHRS), and GPS-aided Inertial Navigation System (INS). Their website claims that their “advanced algorithms fuse output from MEMs inertial sensors, magnetometers, barometric pressure, and a high-sensitivity GPS (GNSS) receiver to deliver fast, accurate, and reliable attitude, velocity, and position even in the most dynamic environments.” The chips and micro navigation accessories are available on the company’s e-store.
The winner of the Showdown, uAvionix, is a leading developer of avionics for both manned and unmanned flight. Their new transceivers and transponders claim to be “the smallest, and lightest and most affordable on the market” (already GPS is a commodity). uAvionix presented its “Ping Network System that reduces weight on average by 40% as compared to the two-piece installations.” The Ping products also claim barometric altitude precision with accuracy beyond 80,000 ft.
Paul Beard, CEO of uAvionix, said, “our customers have asked for even smaller and lighter solutions; integrating the transceivers, GPS receivers, GPS antennas, and barometric pressure sensors into a single form factor facilitates easier installation and lowers weight and power draw requirements resulting in a longer usable flight time.”
As I rushed to the airport to catch my manned flight, I felt reenergized about the drone industry, although follies will persist. I mean who wouldn’t want a pool deckchair drone this summer?
This and all other autonomous subjects will be explored at RobotLabNYC’s next event with Dr. Howard Morgan (FirstRound Capital) and Tom Ryden (MassRobotics) – RSVP.
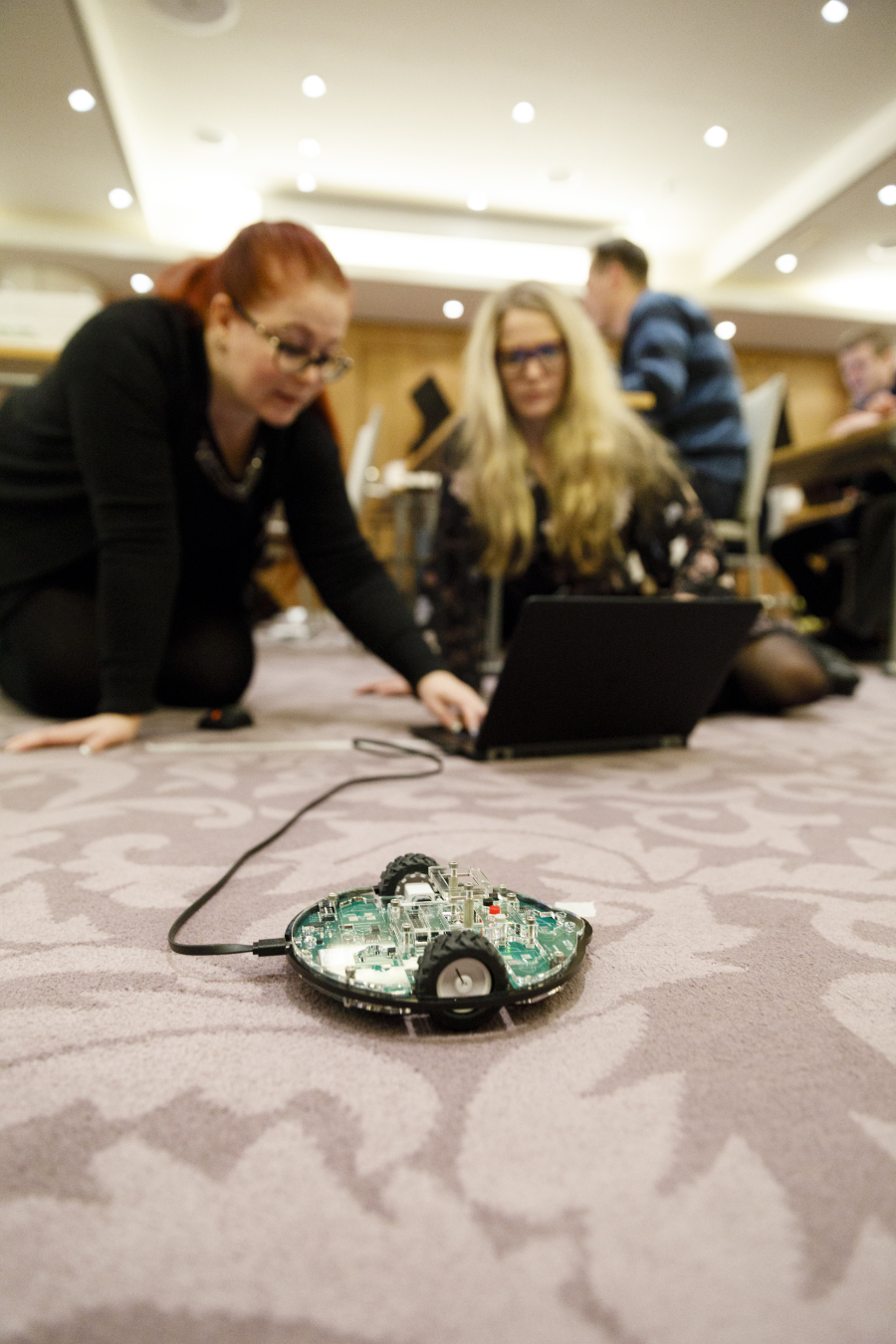
30 teachers arrived, excited to learn. They rolled up their sleeves and placed laptops and Robot kits on the floor. The room filled with excitement (and laughter!) as everyone tried to come up with different solutions on how to create different programs. The results were hilarious; a robot inspired by Darth Vader, a robot that asked everyone to turn the lights off when it was too bright in the room, and a robot that tricked the teacher to leave the classroom during an exam.
Not bad for a day of “work!”
Training, like above, is what we’re all about at ROBBO. ROBBO is a fun and simple way for absolutely anyone to get introduced to the world of robotics and coding. As a part of one of our many projects, we organized a training weekend for the single purpose of introducing teachers to programming and robotics. The teachers started with simple exercises in RobboScratch, a visual programming environment; moving the character, creating series of multiple commands, and learning the advantages of the infinite loop when making programs.
So, what do we mean about classroom robotics? Our educational robotics consist of two different robots; the Robot kit and the Lab. Both robots are ideal for learning programming, robotics as well as skills in problem-solving, mathematics and physics while working in interactive teams. The Lab includes a microphone, LED-lights, light sensor and a slider and is great for experimenting with different elements such as sound or light and numeric values. Our other robot is the Robot kit, equipped with a motor, which is a fun way to explore everyday technology using a touch sensor, proximity sensor, light sensor, line sensors and an LED-light. Our robots are programmed in the visual programming environment RobboScratch, an adapted version of Scratch developed at MIT.
In our earlier example, teachers were divided into separate workshops, working in pairs, or teams of three. We believe it is important to communicate and discuss with others to better understand different programs and come up with alternative solutions if the program doesn’t work in the desired way. The workshops are all based on the exercises from our pedagogical guide, and teachers were given a copy of the guide for their own use. Our guide provides instructions and multiple exercise card (with solutions!) and is free to download here (http://robbo.world/support/).
Our teaching guide is for anyone who wants to learn the basics of programming with the help of ROBBO™ robotics and RobboScratch. Our pedagogical guide is a comprehensive educational tool with instructions, exercise cards and ideas for creating the ultimate learning experience. It has been developed together with Innokas Network at the University of Helsinki and Finnish teachers and students. The majority of the teachers that participated in the training had only limited knowledge of Scratch or Scratch Junior and, therefore, we started from the beginning.
The pedagogical guide includes an introduction to RobboScratch, Lab and Robot kit as well as up to 28 exercise cards to help you along the way. The exercises are designed to develop necessary programming skills step by step, teaching children to think logically as a software developer would do, which may also be useful in many everyday situations. These are, in particular, the ability to understand the whole, to split a problem into smaller parts, and to develop a simple program to perform an operation. In the initial exercises, students will make a program using a predefined model, but as the practice progresses, they will have more and more space for their own ideas.
By developing new skills, users are encouraged to plan and develop innovations in robotics. The training goal is to learn understand and use technology to invent something new. As the final assignment of the teachers’ training, we asked teachers to form teams of four and come up with a small prank using the different capabilities and sensors of either Robot kit or Lab or simultaneous use of both robots.
If you’d like to to learn more about ROBBO or download our free guide, visit our website: http://robbo.world/support/
Comments from teachers:
“The teaching guide is a great support when learning coding. And I can just hand out these ready-made exercise cards to my students as well!”
“The exercise in the guide are good for understanding the different possibilities you have with the robots, because when you start doing an exercise you come up with more ideas on how to develop a more complicated program.”
“The robots emphasized practicality in the learning process. In addition to programming, ROBBO teaches environmental studies and all-around useful skills, in particular when the exercises of the pedagogical guide are being utilized.”
If you’d like to learn more about classroom robotics, check out these articles:
Over 800 leading scientists, companies, and policymakers working in robotics will convene at the European Robotics Forum (#ERF2017) in Edinburgh, 22-24 March. This year’s theme is “Living and Working With Robots” with a focus on applications in manufacturing, disaster relief, agriculture, healthcare, assistive living, education, and mining.
The 3-day programme features keynotes, panel discussions, workshops, and plenty of robots roaming the exhibit floor.
We’ll be updating this post regularly with live tweets and videos. You can also follow all the Robohub coverage here. #erf2017 Tweets
Engineers have designed a microfluidic device they call a “tree-on-a-chip,” which mimics the pumping mechanism of trees and other plants.
Trees and other plants, from towering redwoods to diminutive daisies, are nature’s hydraulic pumps. They are constantly pulling water up from their roots to the topmost leaves, and pumping sugars produced by their leaves back down to the roots. This constant stream of nutrients is shuttled through a system of tissues called xylem and phloem, which are packed together in woody, parallel conduits.
Now engineers at MIT and their collaborators have designed a microfluidic device they call a “tree-on-a-chip,” which mimics the pumping mechanism of trees and plants. Like its natural counterparts, the chip operates passively, requiring no moving parts or external pumps. It is able to pump water and sugars through the chip at a steady flow rate for several days. The results are published this week in Nature Plants.
Anette “Peko” Hosoi, professor and associate department head for operations in MIT’s Department of Mechanical Engineering, says the chip’s passive pumping may be leveraged as a simple hydraulic actuator for small robots. Engineers have found it difficult and expensive to make tiny, movable parts and pumps to power complex movements in small robots. The team’s new pumping mechanism may enable robots whose motions are propelled by inexpensive, sugar-powered pumps.
“The goal of this work is cheap complexity, like one sees in nature,” Hosoi says. “It’s easy to add another leaf or xylem channel in a tree. In small robotics, everything is hard, from manufacturing, to integration, to actuation. If we could make the building blocks that enable cheap complexity, that would be super exciting. I think these [microfluidic pumps] are a step in that direction.”
Hosoi’s co-authors on the paper are lead author Jean Comtet, a former graduate student in MIT’s Department of Mechanical Engineering; Kaare Jensen of the Technical University of Denmark; and Robert Turgeon and Abraham Stroock, both of Cornell University.
A hydraulic lift
The group’s tree-inspired work grew out of a project on hydraulic robots powered by pumping fluids. Hosoi was interested in designing hydraulic robots at the small scale, that could perform actions similar to much bigger robots like Boston Dynamic’s Big Dog, a four-legged, Saint Bernard-sized robot that runs and jumps over rough terrain, powered by hydraulic actuators.
“For small systems, it’s often expensive to manufacture tiny moving pieces,” Hosoi says. “So we thought, ‘What if we could make a small-scale hydraulic system that could generate large pressures, with no moving parts?’ And then we asked, ‘Does anything do this in nature?’ It turns out that trees do.”
The general understanding among biologists has been that water, propelled by surface tension, travels up a tree’s channels of xylem, then diffuses through a semipermeable membrane and down into channels of phloem that contain sugar and other nutrients.
The more sugar there is in the phloem, the more water flows from xylem to phloem to balance out the sugar-to-water gradient, in a passive process known as osmosis. The resulting water flow flushes nutrients down to the roots. Trees and plants are thought to maintain this pumping process as more water is drawn up from their roots.
“This simple model of xylem and phloem has been well-known for decades,” Hosoi says. “From a qualitative point of view, this makes sense. But when you actually run the numbers, you realize this simple model does not allow for steady flow.”
In fact, engineers have previously attempted to design tree-inspired microfluidic pumps, fabricating parts that mimic xylem and phloem. But they found that these designs quickly stopped pumping within minutes.
It was Hosoi’s student Comtet who identified a third essential part to a tree’s pumping system: its leaves, which produce sugars through photosynthesis. Comtet’s model includes this additional source of sugars that diffuse from the leaves into a plant’s phloem, increasing the sugar-to-water gradient, which in turn maintains a constant osmotic pressure, circulating water and nutrients continuously throughout a tree.
Running on sugar
With Comtet’s hypothesis in mind, Hosoi and her team designed their tree-on-a-chip, a microfluidic pump that mimics a tree’s xylem, phloem, and most importantly, its sugar-producing leaves.
To make the chip, the researchers sandwiched together two plastic slides, through which they drilled small channels to represent xylem and phloem. They filled the xylem channel with water, and the phloem channel with water and sugar, then separated the two slides with a semipermeable material to mimic the membrane between xylem and phloem. They placed another membrane over the slide containing the phloem channel, and set a sugar cube on top to represent the additional source of sugar diffusing from a tree’s leaves into the phloem. They hooked the chip up to a tube, which fed water from a tank into the chip.
With this simple setup, the chip was able to passively pump water from the tank through the chip and out into a beaker, at a constant flow rate for several days, as opposed to previous designs that only pumped for several minutes.
“As soon as we put this sugar source in, we had it running for days at a steady state,” Hosoi says. “That’s exactly what we need. We want a device we can actually put in a robot.”
Hosoi envisions that the tree-on-a-chip pump may be built into a small robot to produce hydraulically powered motions, without requiring active pumps or parts.
“If you design your robot in a smart way, you could absolutely stick a sugar cube on it and let it go,” Hosoi says.
This research was supported, in part, by the Defense Advance Research Projects Agency.