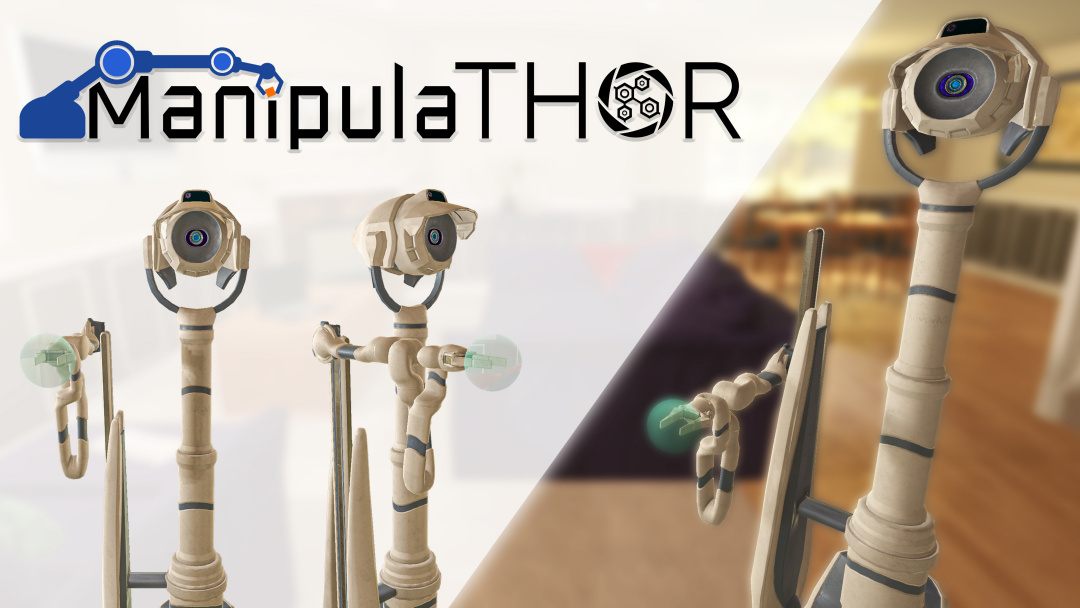
The Allen Institute for AI (AI2) announced the 3.0 release of its embodied artificial intelligence framework AI2-THOR, which adds active object manipulation to its testing framework. ManipulaTHOR is a first of its kind virtual agent with a highly articulated robot arm equipped with three joints of equal limb length and composed entirely of swivel joints to bring a more human-like approach to object manipulation.
AI2-THOR is the first testing framework to study the problem of object manipulation in more than 100 visually rich, physics-enabled rooms. By enabling the training and evaluation of generalized capabilities in manipulation models, ManipulaTHOR allows for much faster training in more complex environments as compared to current real-world training methods, while also being far safer and more cost-effective.
“Imagine a robot being able to navigate a kitchen, open a refrigerator and pull out a can of soda. This is one of the biggest and yet often overlooked challenges in robotics and AI2-THOR is the first to design a benchmark for the task of moving objects to various locations in virtual rooms, enabling reproducibility and measuring progress,” said Dr. Oren Etzioni, CEO at AI2. “After five years of hard work, we can now begin to train robots to perceive and navigate the world more like we do, making real-world usage models more attainable than ever before.”
Despite being an established research area in robotics, the visual reasoning aspect of object manipulation has consistently been one of the biggest hurdles researchers face. In fact, it’s long been understood that robots struggle to correctly perceive, navigate, act, and communicate with others in the world. AI2-THOR solves this problem with complex simulated testing environments that researchers can use to train robots for eventual activities in the real world.
With the pioneering of embodied AI through AI2-THOR, the landscape has changed for the common good. AI2-THOR enables researchers to efficiently devise solutions that address the object manipulation issue, and also other traditional problems associated with robotics testing.
“In comparison to running an experiment on an actual robot, AI2-THOR is incredibly fast and safe,” said Roozbeh Mottaghi, Research Manager at AI2. “Over the years, AI2-THOR has enabled research on many different tasks such as navigation, instruction following, multi-agent collaboration, performing household tasks, reasoning if an object can be opened or not. This evolution of AI2-THOR allows researchers and scientists to scale the current limits of embodied AI.”
In addition to the 3.0 release, the team is hosting the RoboTHOR Challenge 2021 in conjunction with the Embodied AI Workshop at this year’s Conference on Computer Vision and Pattern Recognition (CVPR). AI2’s challenges cover RoboTHOR object navigation; ALFRED (instruction following robots); and Room Rearrangement.
Army and Arizona State University researchers identified a set of approaches to help scientists assess how well autonomous systems and humans communicate.
Running a well-optimized warehouse can help maintain high productivity levels, reduce error rates and keep clients satisfied. There are many ways to achieve better optimization, and installing automated storage and retrieval systems (AS/RS) is a popular solution.
The Swiss robotics company ANYbotics has announced the launch of a new end-to-end robotic inspection system for the energy and industrial processing arenas. This solution aims to answer the call for better safety at production sites and lower downtime.
A team of researchers working at Barcelona Institute of Science and Technology has developed a skeletal-muscle-based, biohybrid soft robot that can swim faster than other skeletal-muscle-based biobots. In their paper published in the journal Science Robotics, the group describes building and testing their soft robot.
You can’t totally count conveyors out, because they’ll always have a place. But the truth is, robots are here, and AMRs are changing warehouse operations. While conveyors are effective, their capabilities are also limited.
Robotic vehicles have been used in dangerous environments for decades, from decommissioning the Fukushima nuclear power plant or inspecting underwater energy infrastructure in the North Sea. More recently, autonomous vehicles from boats to grocery delivery carts have made the gentle transition from research centres into the real world with very few hiccups.
Yet the promised arrival of self-driving cars has not progressed beyond the testing stage. And in one test drive of an Uber self-driving car in 2018, a pedestrian was killed by the vehicle. Although these accidents happen every day when humans are behind the wheel, the public holds driverless cars to far higher safety standards, interpreting one-off accidents as proof that these vehicles are too unsafe to unleash on public roads.
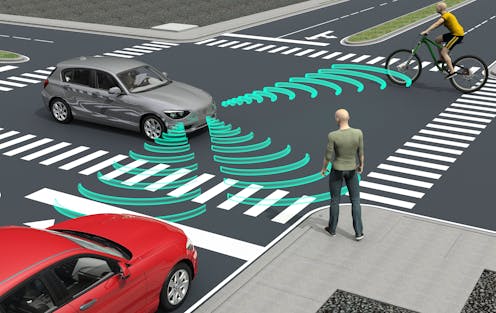
Programming the perfect self-driving car that will always make the safest decision is a huge and technical task. Unlike other autonomous vehicles, which are generally rolled out in tightly controlled environments, self-driving cars must function in the endlessly unpredictable road network, rapidly processing many complex variables to remain safe.
Inspired by the highway code, we’re working on a set of rules that will help self-driving cars make the safest decisions in every conceivable scenario. Verifying that these rules work is the final roadblock we must overcome to get trustworthy self-driving cars safely onto our roads.
Asimov’s first law
Science fiction author Isaac Asimov penned the “three laws of robotics” in 1942. The first and most important law reads: “A robot may not injure a human being or, through inaction, allow a human being to come to harm.” When self-driving cars injure humans, they clearly violate this first law.
We at the National Robotarium are leading research intended to guarantee that self-driving vehicles will always make decisions that abide by this law. Such a guarantee would provide the solution to the very serious safety concerns that are preventing self-driving cars from taking off worldwide.
Self-driving cars must spot, process, and make decisions about hazards and risks almost instantly. Jiraroj Praditcharoenkul/Alamy
AI software is actually quite good at learning about scenarios it has never faced. Using “neural networks” that take their inspiration from the layout of the human brain, such software can spot patterns in data, like the movements of cars and pedestrians, and then recall these patterns in novel scenarios.
But we still need to prove that any safety rules taught to self-driving cars will work in these new scenarios. To do this, we can turn to formal verification: the method that computer scientists use to prove that a rule works in all circumstances.
In mathematics, for example, rules can prove that x + y is equal to y + x without testing every possible value of x and y. Formal verification does something similar: it allows us to prove how AI software will react to different scenarios without our having to exhaustively test every scenario that could occur on public roads.
One of the more notable recent successes in the field is the verification of an AI system that uses neural networks to avoid collisions between autonomous aircraft. Researchers have successfully formally verified that the system will always respond correctly, regardless of the horizontal and vertical manoeuvres of the aircraft involved.
Highway coding
Human drivers follow a highway code to keep all road users safe, which relies on the human brain to learn these rules and applying them sensibly in innumerable real-world scenarios. We can teach self-driving cars the highway code too. That requires us to unpick each rule in the code, teach vehicles’ neural networks to understand how to obey each rule, and then verify that they can be relied upon to safely obey these rules in all circumstances.
However, the challenge of verifying that these rules will be safely followed is complicated when examining the consequences of the phrase “must never” in the highway code. To make a self-driving car as reactive as a human driver in any given scenario, we must program these policies in such a way that accounts for nuance, weighted risk and the occasional scenario where different rules are in direct conflict, requiring the car to ignore one or more of them.
Robot ethicist Patrick Lin introducing the complexity of automated decision-making in self-driving cars.
Such a task cannot be left solely to programmers – it’ll require input from lawyers, security experts, system engineers and policymakers. Within our newly formed AISEC project, a team of researchers is designing a tool to facilitate the kind of interdisciplinary collaboration needed to create ethical and legal standards for self-driving cars.
Teaching self-driving cars to be perfect will be a dynamic process: dependent upon how legal, cultural and technological experts define perfection over time. The AISEC tool is being built with this in mind, offering a “mission control panel” to monitor, supplement and adapt the most successful rules governing self-driving cars, which will then be made available to the industry.
We’re hoping to deliver the first experimental prototype of the AISEC tool by 2024. But we still need to create adaptive verification methods to address remaining safety and security concerns, and these will likely take years to build and embed into self-driving cars.
Accidents involving self-driving cars always create headlines. A self-driving car that recognises a pedestrian and stops before hitting them 99% of the time is a cause for celebration in research labs, but a killing machine in the real world. By creating robust, verifiable safety rules for self-driving cars, we’re attempting to make that 1% of accidents a thing of the past.
Luca Arnaboldi and Matthew Daggitt do not work for, consult, own shares in or receive funding from any company or organisation that would benefit from this article, and have disclosed no relevant affiliations beyond their academic appointment.
Image credit: wata1219 on flickr (CC BY-NC-ND 2.0)
Would you like to learn how to tell your robotics/AI story to the public? Robohub and AIhub are testing a new workshop to train you as the next generation of communicators. You will learn to quickly create your story and shape it to any format, from short tweets to blog posts and beyond. In addition, you will learn how to communicate about robotics/AI in a realistic way (avoiding the hype), and will receive tips from top communicators, science journalists and ealy career researchers. If you feel like being part of our beta testers, join this free workshop to experience how much impact science communication can have on your professional journey!
The workshop is taking place on Friday the 30th of April, 10am-12.30pm (UK time) via Zoom. Please, sign up by sending an email to daniel.carrillozapata@robohub.org.
Ever wondered why your virtual home assistant doesn't understand your questions? Or why your navigation app took you on the side street instead of the highway? In a study published April 21st in the journal iScience, Italian researchers designed a robot that "thinks out loud" so that users can hear its thought process and better understand the robot's motivations and decisions.
To enable the efficient operation of unmanned aerial vehicles (UAVs) in instances where a global localization system (GPS) or an external positioning device (e.g., a laser reflector) is unavailable, researchers must develop techniques that automatically estimate a robot's pose. If the environment in which a drone operates does not change very often and one is able to build a 3D map of this environment, map-based robot localization techniques can be fairly effective.
Researchers at the University of Twente have discovered that primary school children in both regular and special needs schools make strides when they learn together with a robot. On 30 April, both Daniel Davison and Bob Schadenberg will obtain their Ph.D.s from UT, with comparable research but working in different contexts.
It’s easy to show a robot being programmed in a matter of minutes inside of a controlled virtual environment. But those programs need to translate to something useful in the real robot cell. The points that the robot will follow need to line up with the part properly.
For my PhD, I’m studying how global problems such as wildfires and aid delivery in remote areas can benefit from innovative technologies such as UAV (unmanned aerial vehicle) swarms.
Every year, vast areas of forests are destroyed due to wildfires. Wildfires occur more frequently as climate change induces extreme weather conditions. As a result, wildfires are often larger and more intense. Over the past 5 years, countries around the globe witnessed unprecedented effects of wildfires. Greece has seen the deadliest wildfire incident in its modern history, Australia witnessed 18,636,079 hectares being burnt and British Columbia faced wildfire incidents that burnt 1,351,314 hectares.
Rather than jump straight in to the design of swarm algorithms for UAVs in these scenarios, I spent a year speaking with firefighters around the world to ask about their current operations and how UAVs could help. This technique is called mutual shaping where end users cooperate with developers to co-create a system. It’s been interesting to see the challenges they face, their openness to drones and their ideas on the operation of a swarm. Firefighters face numerous challenges in their operations. Their work is dangerous and they need to ensure the safety of citizens and themselves. However, they often don’t have enough information about the environment they are deploying in. The good news is that UAVs are already used by firefighters to retrieve information during their operations, usually during very short human-piloted flights with small off-the-shelf drones. Having larger drones, with longer autonomy and higher payload, could provide high-value information to firefighters or actively identify and extinguish newly developed fire fronts.
I think one of the reasons we don’t have these swarms in these applications is that 1) we didn’t have the hardware capabilities (N robots with high-payload at a reasonable cost) , 2) we don’t have the algorithms that allow for effective swarm deployments at the scale of a country (necessary to monitor for forest fires), and 3) we can’t easily change our swarm strategies on the go based on what is happening in reality. That’s where digital twins come in. A digital twin is the real-time virtual representation of the world we can use to iterate solutions. The twin can be simplistic in 2D or a more realistic 3D representation, with data from the real-world continuously updating the model.
To develop this framework for digital twins we’re starting a new project with Windracers ltd, Distributed Avionics ltd, and the University of Bristol co-funded by Innovate UK. Windracers ltd. has developed a novel UAV: the ULTRA platform, that can transport 100kg of payload over a 1000km range. Distributed Avionics specialises in high-reliability flight control solutions and Hauert Lab, which engineers swarm systems across scales – from huge number of tiny nanoparticles for cancer treatment to robots for logistics.
In the future, we aim to use the same concepts to enable aid delivery using UAV swarms. The 2020 Global Report on Food Crises states that more than 135 million people across 53 countries require urgent food, nutrition, and livelihoods assistance. Aerial delivery of such aid could help access remote communities and avoid in-person transmission of highly infectious diseases such as COVID-19.
Here’s a video presenting the concept:
By the end of this project, we are hoping to demonstrate the deployment of 5 real UAVs that will be able to interact with a simple digital twin. We also want to test live deployment of the control swarm system on the UAVs.
Are you a firefighter, someone involved in aid delivery, do you have other ideas for us. We’d love to hear from you.
Multi-robot systems have recently been used to tackle a variety of real-world problems, for instance, helping human users to monitor environments and access secluded locations. In order to navigate unknown and dynamic environments most efficiently, these robotic systems should be guided by path planners, which can identify collision-free trajectories for individual robots in a team.