Light-powered soft robots could suck up oil spills
Afloating, robotic film designed at UC Riverside could be trained to hoover oil spills at sea or remove contaminants from drinking water.
By Marco Arruda
In this post you’ll learn how to publish to a ROS2 topic using ROS2 C++. Up to the end of the video, we are moving the robot Dolly robot, simulated using Gazebo 11.
You’ll learn:
Before anything else, make sure you have the rosject from the previous post, you can copy it from here.
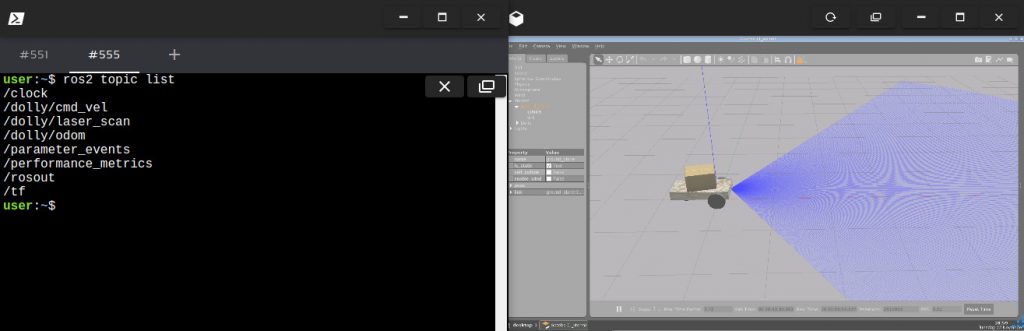
Launch the simulation in one webshell and in a different tab, checkout the topics we have available. You must get something similar to the image below:
Create a new file to container the publisher node: moving_robot.cpp and paste the following content:
#include <chrono>
#include <functional>
#include <memory>
#include "rclcpp/rclcpp.hpp"
#include "geometry_msgs/msg/twist.hpp"
using namespace std::chrono_literals;
/* This example creates a subclass of Node and uses std::bind() to register a
* member function as a callback from the timer. */
class MovingRobot : public rclcpp::Node {
public:
MovingRobot() : Node("moving_robot"), count_(0) {
publisher_ =
this->create_publisher("/dolly/cmd_vel", 10);
timer_ = this->create_wall_timer(
500ms, std::bind(&MovingRobot::timer_callback, this));
}
private:
void timer_callback() {
auto message = geometry_msgs::msg::Twist();
message.linear.x = 0.5;
message.angular.z = 0.3;
RCLCPP_INFO(this->get_logger(), "Publishing: '%f.2' and %f.2",
message.linear.x, message.angular.z);
publisher_->publish(message);
}
rclcpp::TimerBase::SharedPtr timer_;
rclcpp::Publisher::SharedPtr publisher_;
size_t count_;
};
int main(int argc, char *argv[]) {
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared());
rclcpp::shutdown();
return 0;
}QoS (Quality of Service)
Similar to the subscriber it is created a class that inherits Node. A publisher_ is setup and also a callback, although this time is not a callback that receives messages, but a timer_callback called in a frequency defined by the timer_ variable. This callback is used to publish messages to the robot.
The create_publisher method needs two arguments:
The message published must be created using the class imported:
message = geometry_msgs::msg::Twist();
We ensure the callback methods on the subscribers side will always recognize the message. This is the way it has to be published by using the publisher method publish.
In order to compile we need to adjust some things in the ~/ros2_ws/src/my_package/CMakeLists.txt. So add the following to the file:
find_package(geometry_msgs REQUIRED)
...
# moving robot
add_executable(moving_robot src/moving_robot.cpp)
ament_target_dependencies(moving_robot rclcpp geometry_msgs)
...
install(TARGETS
moving_robot
reading_laser
DESTINATION lib/${PROJECT_NAME}/
)
We can run the node like below:
source ~/ros2_ws/install/setup.bash
ros2 run my_package

The post Exploring ROS2 using wheeled Robot – #3 – Moving the Robot
appeared first on The Construct.
By Marco Arruda
In this post you’ll learn how to publish to a ROS2 topic using ROS2 C++. Up to the end of the video, we are moving the robot Dolly robot, simulated using Gazebo 11.
You’ll learn:
Before anything else, make sure you have the rosject from the previous post, you can copy it from here.
Launch the simulation in one webshell and in a different tab, checkout the topics we have available. You must get something similar to the image below:
Create a new file to container the publisher node: moving_robot.cpp and paste the following content:
#include <chrono>
#include <functional>
#include <memory>
#include "rclcpp/rclcpp.hpp"
#include "geometry_msgs/msg/twist.hpp"
using namespace std::chrono_literals;
/* This example creates a subclass of Node and uses std::bind() to register a
* member function as a callback from the timer. */
class MovingRobot : public rclcpp::Node {
public:
MovingRobot() : Node("moving_robot"), count_(0) {
publisher_ =
this->create_publisher("/dolly/cmd_vel", 10);
timer_ = this->create_wall_timer(
500ms, std::bind(&MovingRobot::timer_callback, this));
}
private:
void timer_callback() {
auto message = geometry_msgs::msg::Twist();
message.linear.x = 0.5;
message.angular.z = 0.3;
RCLCPP_INFO(this->get_logger(), "Publishing: '%f.2' and %f.2",
message.linear.x, message.angular.z);
publisher_->publish(message);
}
rclcpp::TimerBase::SharedPtr timer_;
rclcpp::Publisher::SharedPtr publisher_;
size_t count_;
};
int main(int argc, char *argv[]) {
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared());
rclcpp::shutdown();
return 0;
}QoS (Quality of Service)
Similar to the subscriber it is created a class that inherits Node. A publisher_ is setup and also a callback, although this time is not a callback that receives messages, but a timer_callback called in a frequency defined by the timer_ variable. This callback is used to publish messages to the robot.
The create_publisher method needs two arguments:
The message published must be created using the class imported:
message = geometry_msgs::msg::Twist();
We ensure the callback methods on the subscribers side will always recognize the message. This is the way it has to be published by using the publisher method publish.
In order to compile we need to adjust some things in the ~/ros2_ws/src/my_package/CMakeLists.txt. So add the following to the file:
find_package(geometry_msgs REQUIRED)
...
# moving robot
add_executable(moving_robot src/moving_robot.cpp)
ament_target_dependencies(moving_robot rclcpp geometry_msgs)
...
install(TARGETS
moving_robot
reading_laser
DESTINATION lib/${PROJECT_NAME}/
)
We can run the node like below:
source ~/ros2_ws/install/setup.bash
ros2 run my_package
The post Exploring ROS2 using wheeled Robot – #3 – Moving the Robot
appeared first on The Construct.

Much excellent work has been done, by many organizations, to develop ‘Roadmaps for Robotics’, in order to steer government policy, innovation investment, and the development of standards and commercialization. However, unless you took part in the roadmapping activity, it can be very hard to find these resources. Silicon Valley Robotics in partnership with the Industrial Activities Board of the IEEE Robotics and Automation Society, is compiling an up to date resource list of various robotics, AIS and AI roadmaps, national or otherwise. This initiative will allow us all to access the best robotics commercialization advice from around the world, to be able to compare and contrast various initiatives and their regional effectiveness, and to provide guidance for countries and companies without their own robotics roadmaps.
Another issue making it harder to find recent robotics roadmaps is the subsumption of robotics into the AI landscape, at least in some national directives. Or it may appear not as robotics but as ‘AIS’, standing for Autonomous Intelligent Systems, such as in the work of OCEANIS, the Open Community for Ethics in Autonomous aNd Intelligent Systems, which hosts a global standards repository. And finally there are subcategories of robotics, ie Autonomous Vehicles, or Self Driving Cars, or Drones, or Surgical Robotics, all of which may have their own roadmaps. This is not an exhaustive list, but with your help we can continue to evolve it.
Do you know of robotics roadmaps not yet included? Please share them with us.