In the Adaptive Machine Platform Prolynk, manufacturing machinery and assembly stations can be configured and combined with total flexibility. The parts move individually from station to station, in a mini-taxi so to speak.
In this episode, our interviewer Lilly speaks to Alex Wallar, co-founder and CTO of The Routing Company. Wallar shares his background in multi-robot path-planning and optimization, and his research on scheduling and routing algorithms for high-capacity ride-sharing. They discuss how The Routing Company helps cities meet the needs of their people, the technical ins and outs of their dispatcher and assignment system, and the importance of public transit to cities and their economics.
Alex Wallar
Alex Wallar is Co-founder and CTO of the Routing Company, an on-demand vehicle routing and management platform that partners with cities to power the future of public transit. Previously he was pursuing a PhD in the Computer Science and Artificial Intelligence Lab at MIT, conducting research on mathematical optimization for high-capacity ride-sharing.
In this episode, our interviewer Lilly speaks to Alex Wallar, co-founder and CTO of The Routing Company. Wallar shares his background in multi-robot path-planning and optimization, and his research on scheduling and routing algorithms for high-capacity ride-sharing. They discuss how The Routing Company helps cities meet the needs of their people, the technical ins and outs of their dispatcher and assignment system, and the importance of public transit to cities and their economics.
Alex Wallar
Alex Wallar is Co-founder and CTO of the Routing Company, an on-demand vehicle routing and management platform that partners with cities to power the future of public transit. Previously he was pursuing a PhD in the Computer Science and Artificial Intelligence Lab at MIT, conducting research on mathematical optimization for high-capacity ride-sharing.
CRG Automation and its team of engineers — with specialties such as mechanical, electrical and controls —began devising custom engineered solutions, often incorporating
advanced robotics.
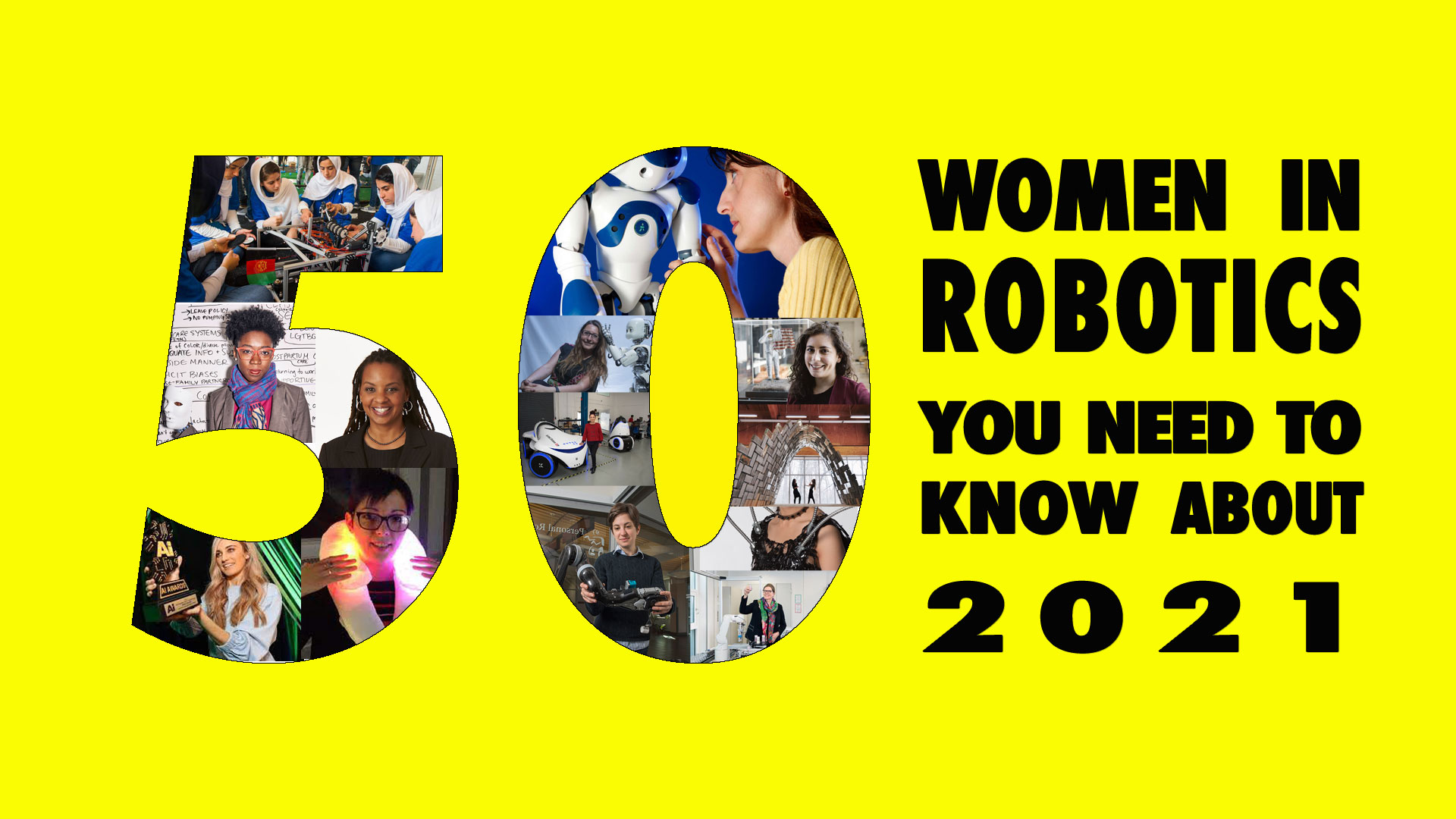
It’s Ada Lovelace Day and once again we’re delighted to introduce you to “50 women in robotics you need to know about”! From the Afghanistan Girls Robotics Team to K.G.Engelhardt who in 1989 founded, and was the first Director of, the Center for Human Service Robotics at Carnegie Mellon, these women showcase a wide range of roles in robotics. We hope these short bios will provide a world of inspiration, in our ninth Women in Robotics list! Tweet this
In 2021, we showcase women in robotics in Afghanistan, Australia, Canada, Denmark, Finland, France, Germany, Hong Kong, India, Iran, Ireland, Israel, Italy, Japan, New Zealand, Portugal, Singapore, South Africa, Spain, Switzerland, Russia, United Kingdom and United States. They are researchers, industry leaders, and artists. Some women are at the start of their careers, while others have literally written the book, the program or the standards.
It is, however, disturbing how hard it can be to find records of women who were an important part of the history of robotics, such as K.G. Engelhardt. Statistically speaking, women are far more likely to leave the workforce or change careers due to family pressures, and that contributes to the erasure. Last year, we talked about the importance of having more equitable citation counts. The citation problem is expected to significantly disadvantage women and people of color due to the historical lack of women followed by the recent growth of large scientific teams, multiplying exclusion.
A more dangerous form of erasure is happening today in Afghanistan. The Afghanistan Girls Robotics Team was forced to flee the country, thanks to help from their support group, the Digital Citizen Fund. What steps must the international community take in support of a future for Afghan girls’ education? Hear from UN Deputy Secretary-General Amina Mohammed, Nobel Laureate and Malala Fund Co-Founder Malala Yousafzai, and Somaya Faruqi, Captain of the Afghan Dreamers Robotics Team, in this recent UN video.
Meanwhile, UC Davis developed an online digital backpack to keep academic credentials and school records safe and private. The Article 26 Backpack references the 1948 Universal Declaration of Human Rights, and the right to an education. At the moment, the Backpack is for people 18 and over, with a high school diploma or baccalaureate, whose education has been affected by war, conflict or economic conditions.
On the good news front, the IEEE RAS Women in Engineering (WIE) Committee recently completed a several year study of gender representation in conference leading roles at RAS-supported conferences. Individuals who hold these roles select organizing committees, choose speakers, and make final decisions on paper acceptances. In this video, the authors lead a discussion about the findings and the story behind the study. In addition to presenting detailed data and releasing anonymized datasets for further study, the authors provided suggestions on changes to help ensure a more diverse and representative robotics community where anyone can thrive. The paper “Gender Diversity of Conference Leadership” by Laura Graesser, Aleksandra Faust, Hadas Kress-Gazit, Lydia Tapia, and Risa Ulinskiby was in the June 2021 IEEE Robotics and Automation Magazine, with a follow up “Retrospective on a Watershed Moment for IEEE Robotics and Automation Society Gender Diversity [Women in Engineering]” in Sep 2021 by Lydia Tapia reporting on gender diversity initiatives undertaken by the Robotics and Automation Society.
We publish this list because the lack of visibility of women in robotics leads to the unconscious perception that women aren’t making newsworthy contributions. We encourage you to use our lists to help find women for keynotes, panels, interviews and to cite their research and include them in curricula. Tulane University published a guide to help you calculate how much of your reading list includes female authors and a citation guide, similar to the CiteHer campaign from BlackComputeher.org.
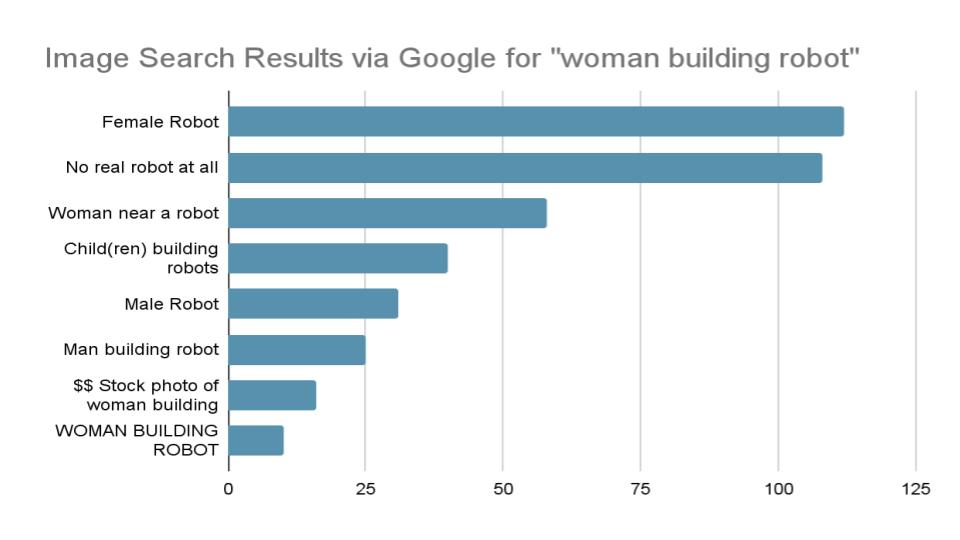
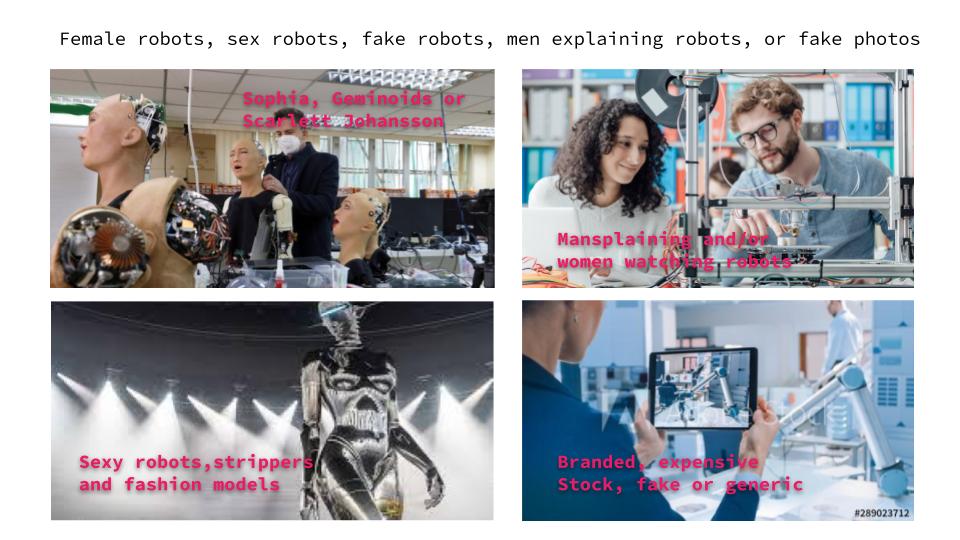
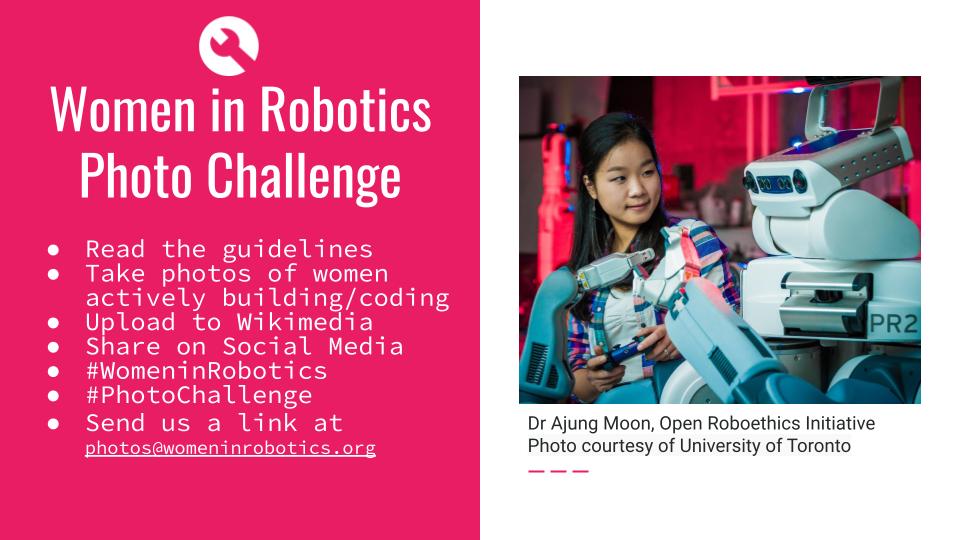
And Women in Robotics have just launched a Photo Challenge! We got so tired of seeing literally hundreds of images of female robots showing up whenever we searched for images of women building robots, or images of men building robots while women watched. Let’s push Sophia out of the top search results and showcase real women building real robots instead!
We hope you are inspired by these profiles, and if you want to work in robotics too, please join us at Women in Robotics. We are now a 501(c)(3) non-profit organization, but even so, this post wouldn’t be possible if not for the hard work of volunteers; Andra Keay, Fatemeh Pahlevan Aghababa, Jeana diNatale and Daniel Carrillo Zapata. Tweet this
And we encourage #womeninrobotics and women who’d like to work in robotics to join our professional network at http://womeninrobotics.org Want to keep reading? There are more than 200 other stories on our 2013 to 2020 lists. Why not nominate someone for inclusion next year! Tweet this
It’s Ada Lovelace Day and once again we’re delighted to introduce you to “50 women in robotics you need to know about”! From the Afghanistan Girls Robotics Team to K.G.Engelhardt who in 1989 founded, and was the first Director of, the Center for Human Service Robotics at Carnegie Mellon, these women showcase a wide range of roles in robotics. We hope these short bios will provide a world of inspiration, in our ninth Women in Robotics list! Tweet this.
In 2021, we showcase women in robotics in Afghanistan, Australia, Canada, Denmark, Finland, France, Germany, Hong Kong, India, Iran, Ireland, Israel, Italy, Japan, New Zealand, Portugal, Singapore, South Africa, Spain, Switzerland, Russia, United Kingdom and United States. They are researchers, industry leaders, and artists. Some women are at the start of their careers, while others have literally written the book, the program or the standards.
It is, however, disturbing how hard it can be to find records of women who were an important part of the history of robotics, such as K.G. Engelhardt. Statistically speaking, women are far more likely to leave the workforce or change careers due to family pressures, and that contributes to the erasure. Last year, we talked about the importance of having more equitable citation counts. The citation problem is expected to significantly disadvantage women and people of color due to the historical lack of women followed by the recent growth of large scientific teams, multiplying exclusion.
A more dangerous form of erasure is happening today in Afghanistan. The Afghanistan Girls Robotics Team was forced to flee the country, thanks to help from their support group, the Digital Citizen Fund. What steps must the international community take in support of a future for Afghan girls’ education? Hear from UN Deputy Secretary-General Amina Mohammed, Nobel Laureate and Malala Fund Co-Founder Malala Yousafzai, and Somaya Faruqi, Captain of the Afghan Dreamers Robotics Team, in this recent UN video.
Meanwhile, UC Davis developed an online digital backpack to keep academic credentials and school records safe and private. The Article 26 Backpack references the 1948 Universal Declaration of Human Rights, and the right to an education. At the moment, the Backpack is for people 18 and over, with a high school diploma or baccalaureate, whose education has been affected by war, conflict or economic conditions.
On the good news front, the IEEE RAS Women in Engineering (WIE) Committee recently completed a several year study of gender representation in conference leading roles at RAS-supported conferences. Individuals who hold these roles select organizing committees, choose speakers, and make final decisions on paper acceptances. In this video, the authors lead a discussion about the findings and the story behind the study. In addition to presenting detailed data and releasing anonymized datasets for further study, the authors provided suggestions on changes to help ensure a more diverse and representative robotics community where anyone can thrive. The paper “Gender Diversity of Conference Leadership” by Laura Graesser, Aleksandra Faust, Hadas Kress-Gazit, Lydia Tapia, and Risa Ulinskiby was in the June 2021 IEEE Robotics and Automation Magazine, with a follow up “Retrospective on a Watershed Moment for IEEE Robotics and Automation Society Gender Diversity [Women in Engineering]” in Sep 2021 by Lydia Tapia reporting on gender diversity initiatives undertaken by the Robotics and Automation Society.
We publish this list because the lack of visibility of women in robotics leads to the unconscious perception that women aren’t making newsworthy contributions. We encourage you to use our lists to help find women for keynotes, panels, interviews and to cite their research and include them in curricula. Tulane University published a guide to help you calculate how much of your reading list includes female authors and a citation guide, similar to the CiteHer campaign from BlackComputeher.org.
And Women in Robotics have just launched a Photo Challenge! We got so tired of seeing literally hundreds of images of female robots showing up whenever we searched for images of women building robots, or images of men building robots while women watched. Let’s push Sophia out of the top search results and showcase real women building real robots instead!
We hope you are inspired by these profiles, and if you want to work in robotics too, please join us at Women in Robotics. We are now a 501(c)(3) non-profit organization, but even so, this post wouldn’t be possible if not for the hard work of volunteers; Andra Keay, Fatemeh Pahlevan Aghababa, Jeana diNatale and Daniel Carrillo Zapata. Tweet this
And we encourage #womeninrobotics and women who’d like to work in robotics to join our professional network at http://womeninrobotics.org Want to keep reading? There are more than 200 other stories on our 2013 to 2020 lists (and their updates):
How can women feel as if they belong in robotics if we can’t see any pictures of women building or programming robots? The Civil Rights Activist Marian Wright Edelson aptly said, “You can’t be what you can’t see.” We’d like you all to take photos of women building and coding robots and share them with us!
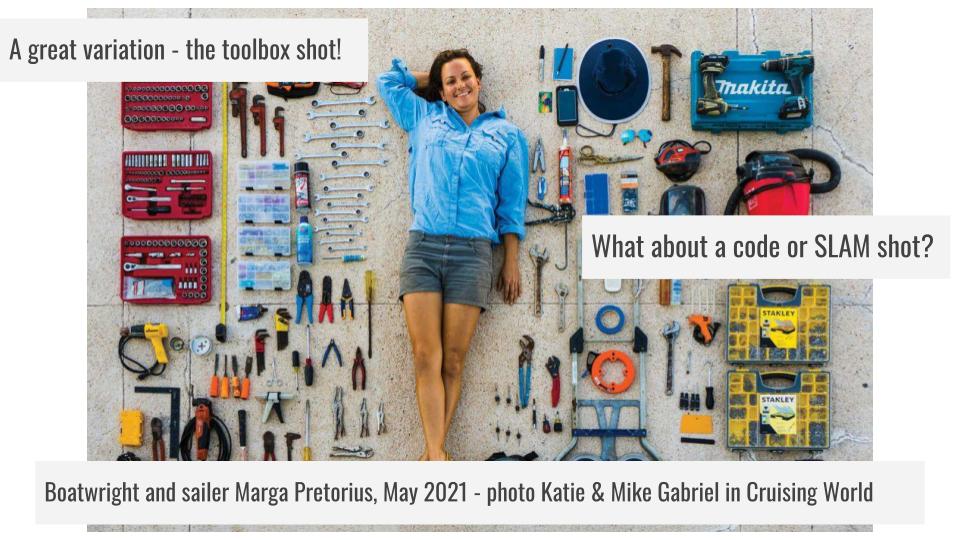
Here’s the handy guide to what a great photo looks like with some awesome examples. This is a great opportunity for research labs and robotics companies to showcase their talented women and other underrepresented groups.
How can women feel as if they belong in robotics if we can’t see any pictures of women building or programming robots? The Civil Rights Activist Marian Wright Edelson aptly said, “You can’t be what you can’t see.” We’d like you all to take photos of women building and coding robots and share them with us!
Here’s the handy guide to what a great photo looks like with some awesome examples. This is a great opportunity for research labs and robotics companies to showcase their talented women and other underrepresented groups.
In recent years, roboticists have created a variety of systems that could eventually operate in real-world environments. As most real-world settings, particularly public spaces, are dynamic and unpredictable, to efficiently navigate these environments robots should be able to gain a good understanding of their surroundings.
Advances in technology over the years have led to a wide range of innovations for people with disabilities. These include quality of life inventions for people with mobility issues as well as speech impairments and even common color blindness.
In this episode, Audrow Nash speaks with Melonee Wise, former CEO of Fetch Robotics and current VP of Robotics Automation at Zebra Technologies. Melonee speaks about the origin of Fetch Robotics, her experience at Willow Garage, her experience being acquired by Zebra Technologies, challenges in the warehouse setting, on autonomous cars, and on the future of robotics.
In this episode, Audrow Nash speaks with Melonee Wise, former CEO of Fetch Robotics and current VP of Robotics Automation at Zebra Technologies. Melonee speaks about the origin of Fetch Robotics, her experience at Willow Garage, her experience being acquired by Zebra Technologies, challenges in the warehouse setting, on autonomous cars, and on the future of robotics.
On the 12th of October, the world will celebrate Ada Lovelace Day to honor the achievements of women in science, technology, engineering and maths (STEM). After a successful worldwide online celebration of Ada Lovelace Day last year, this year’s celebration returns with a stronger commitment to online inclusion. In Finding Ada (the main network supporting Ada Lovelace Day), there will be three free webinars that you can enjoy in the comfort of your own home. There will also be loads of events happening around the world, so you have a wide range of content to celebrate Ada Lovelace Day 2021!
Engineering is the science of problem solving, and we have some pretty big problems in front of us. So how are engineers tackling the COVID-19 pandemic and climate change? And how do they stay focused on the impact of their engineering solutions on people and communities?
In partnership with STEM Wana Trust, we invite you to join Renée Young, associate mechanical engineer at Beca, Victoria Clark, senior environmental engineer at Beca, Natasha Mudaliar, operations manager at Reliance Reinforcing, and Sujata Roy, system planning engineer at Transpower, for a fascinating conversation about the challenges and opportunities of engineering.
13:00 NZST, 12 Oct: Perfect for people in New Zealand, Australia, and the Americas. (Note for American audiences: This panel will be on Monday for you.)
Register here, and find out about the speakers here.
The Technical Artist is a new kind of role in the games industry, but the possibilities for those who create and merge art and technology is endless. So what is tech art? And how are tech artists pushing the boundaries and creating new experiences for players?
Ada Lovelace Day and Ukie’s #RaiseTheGame invite you to join tech artist Kristrun Fridriksdottir, Jodie Azhar, technical art director at Silver Rain Games, Emma Roseburgh from Avalanche Studios, and Laurène Hurlin from Pixel Toys for our tech art webinar.
13:00 BST, 12 Oct: Perfect for people in the UK, Europe, Africa, Middle East, India, for early birds in the Americas and night owls in AsiaPacific.
Register here, and find out about the speakers here.
Hypersleep is a common theme in science fiction, but what does science have to say about putting humans into suspended animation? What can we learn from hibernating animals? What’s the difference between hibernation and sleep? What health impacts would extended hypersleep have?
Ada Lovelace Day and the Arthur C. Clarke Award invite you to join science fiction author Anne Charnock, Prof Gina Poe, an expert on the relationship between sleep and memory, Dr Anusha Shankar, who studies torpor in hummingbirds, and Prof Kelly Drew, who studies hibernation in squirrels, for a discussion of whether hypersleep in humans is possible.
19:00 BST, 12 Oct: Perfect for people in the UK, Europe, Africa, and the Americas.
Register here, and find out about the speakers here.
For a full overview of international events, check out this website.
We also hope that you enjoy reading our annual list of women in robotics that you need to know that will be released on the day. Happy Ada Lovelace Day 2021!
On the 12th of October, the world will celebrate Ada Lovelace Day to honor the achievements of women in science, technology, engineering and maths (STEM). After a successful worldwide online celebration of Ada Lovelace Day last year, this year’s celebration returns with a stronger commitment to online inclusion. In Finding Ada (the main network supporting Ada Lovelace Day), there will be three free webinars that you can enjoy in the comfort of your own home. There will also be loads of events happening around the world, so you have a wide range of content to celebrate Ada Lovelace Day 2021!
Engineering is the science of problem solving, and we have some pretty big problems in front of us. So how are engineers tackling the COVID-19 pandemic and climate change? And how do they stay focused on the impact of their engineering solutions on people and communities?
In partnership with STEM Wana Trust, we invite you to join Renée Young, associate mechanical engineer at Beca, Victoria Clark, senior environmental engineer at Beca, Natasha Mudaliar, operations manager at Reliance Reinforcing, and Sujata Roy, system planning engineer at Transpower, for a fascinating conversation about the challenges and opportunities of engineering.
13:00 NZST, 12 Oct: Perfect for people in New Zealand, Australia, and the Americas. (Note for American audiences: This panel will be on Monday for you.)
Register here, and find out about the speakers here.
The Technical Artist is a new kind of role in the games industry, but the possibilities for those who create and merge art and technology is endless. So what is tech art? And how are tech artists pushing the boundaries and creating new experiences for players?
Ada Lovelace Day and Ukie’s #RaiseTheGame invite you to join tech artist Kristrun Fridriksdottir, Jodie Azhar, technical art director at Silver Rain Games, Emma Roseburgh from Avalanche Studios, and Laurène Hurlin from Pixel Toys for our tech art webinar.
13:00 BST, 12 Oct: Perfect for people in the UK, Europe, Africa, Middle East, India, for early birds in the Americas and night owls in AsiaPacific.
Register here, and find out about the speakers here.
Hypersleep is a common theme in science fiction, but what does science have to say about putting humans into suspended animation? What can we learn from hibernating animals? What’s the difference between hibernation and sleep? What health impacts would extended hypersleep have?
Ada Lovelace Day and the Arthur C. Clarke Award invite you to join science fiction author Anne Charnock, Prof Gina Poe, an expert on the relationship between sleep and memory, Dr Anusha Shankar, who studies torpor in hummingbirds, and Prof Kelly Drew, who studies hibernation in squirrels, for a discussion of whether hypersleep in humans is possible.
19:00 BST, 12 Oct: Perfect for people in the UK, Europe, Africa, and the Americas.
Register here, and find out about the speakers here.
For a full overview of international events, check out this website.
We also hope that you enjoy reading our annual list of women in robotics that you need to know that will be released on the day. Happy Ada Lovelace Day 2021!
ROEQ has launched two new top modules and accompanying accessories designed to boost the payload and lifting capabilities of autonomous mobile robots from Mobile Industrial Robots (MiR). The new ROEQ TMS-C1500 allows MiR AMRs to transport up to 1500 kg for the first time.