by Helen Massy-Beresford
Low birth rates and higher life expectancies mean that those over 65 years old now will account for 28.7 % of Europe’s population by 2080, according to Eurostat, the EU’s statistics arm.
It means the age-dependency ratio – the proportion of the elderly compared with the number of workers – will almost double from 28.8 % in 2015 to 51 % in 2080, straining healthcare systems and national budgets.
Yet there’s hope marching over the horizon, in the form of robots.
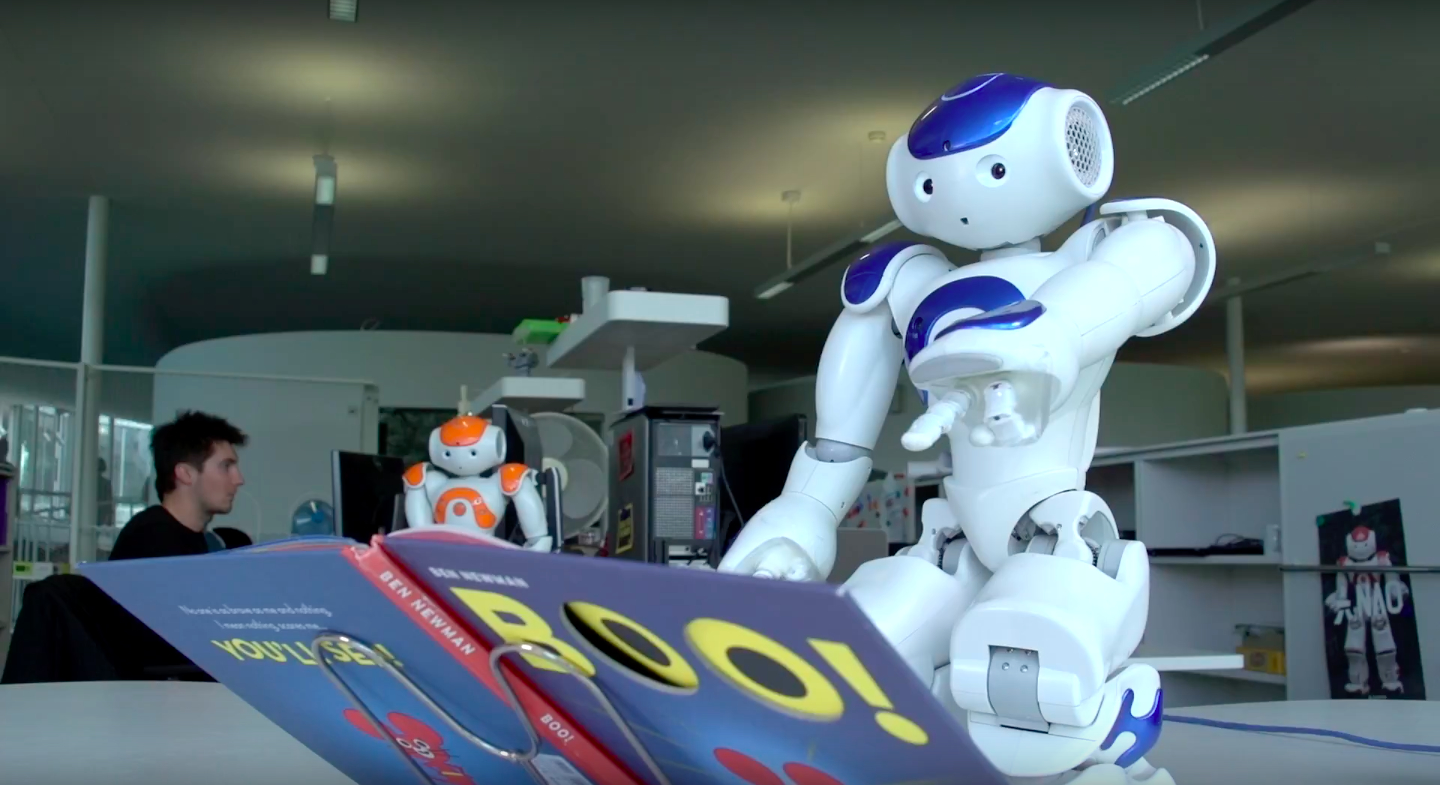
The creators of one humanoid robot under development for the elderly say it can understand people’s actions and learn new behaviours in response, even though it is devoid of arms.
Robots can be programmed to understand an elderly person’s preferences and habits to detect changes in behaviour: for example if a yoga devotee misses a class, it will ask why, while if an elderly person falls it will automatically alert caregivers or emergency services.
Yet there’s still a way to go before these devices will be able to bring out a tray of tea and biscuits when visitors drop by, according to its creator.
At the moment there are things the robot can perform perfectly in the lab but that still present challenges, says Dr Luís Santos from the University of Coimbra in Portugal, who has been developing the technology as part of an EU-funded research project known as GrowMeUp.

‘There is a mismatch between what elderly people want and what science and technology can provide – some of them are expecting robots to do all types of household activities, engage them in everyday gossip or physically interact with them as another human would do,’ says Dr Santos.
The team is working on making the robot’s dialogue as natural and as intuitive as possible and improving its ability to safely navigate an older person’s home, using a low-cost laser and a camera, and a second prototype will be tested with elderly people in the coming months. Yet, Dr Santos foresees that these devices are still four to six years away from commercialisation, at least.
Revolution
He sees robotics as just a part of a wider revolution underway in how societies care for the elderly, with connectivity and augmented reality also playing a role.
‘In the future, elderly care will also be very focused on information and communications technologies – for example virtual access to doctors or care institutions and 24/7 monitoring in a non-invasive way are likely to become standard,’ he said.
Yet researchers believe that keeping the technology unobtrusive is key – no wearable devices or cumbersome cameras cluttering up people’s homes.
Dr Maria Dagioglou from the National Centre of Scientific Research ‘Demokritos’ in Greece, said: ‘We wanted to avoid a Big Brother scenario, so data privacy is important but also dignity.’
She is looking at ways to integrate robotics technology into a smart home equipped with connected devices, automation and sensors, as part of the EU-funded RADIO project.

Dr Stasinos Konstantopoulos, the scientific manager of the RADIO project, added: ‘All monitoring happens as the user interacts with the system to control the house, for example, to regulate the temperature, and to ask the robot to run errands, like finding misplaced items.’
Using a tablet or smartphone to interact, the equipment, which should only take a day to install, can monitor elements of an elderly person’s day-to-day life, efficiently processing and managing data to allow medical professionals to keep track of and assess their level of independence via smartphone notifications.
‘It’s a constant safety net in case something starts to be worrying,’ said Dr Dagioglou.
The goal of innovations like this is to allow people to live independently for longer.
A crucial element of this is finding ways for older people to keep up their activity levels, and this is an area where robots could really come into their own.
Dr Luigi Palopoli at the University of Trento in Italy said ‘our robot pushes them to do their exercise, to go out and about; it extracts information on their interests and on their fears and makes them part of a network.’
Barriers
‘We want to tear down the emotional barriers that make them stay at home and degrade the quality of their life,’ he said.
As part of the EU-funded Acanto project, he is developing a robot called FriWalk, following on from the progress made during a previous EU-funded project, the DALi project.
The team has worked hard to make the FriWalk robot look energetic and appealing and to ensure it offers useful services like carrying small items or giving directions.
With prototypes made, in the next few months, the researchers will start clinical trials in Spain as well as public demonstrations of the FriWalk in museums and other public spaces.

Further ahead, Dr Palopoli hopes for interest from established manufacturers and start-ups to bring the FriWalk technology to the market.
If you liked this article, you may also want to read:
- Choreographing automated cars could save time, money and lives
- 3D-printed houses and cars on the horizon as manufacturing goes large
- Keeping a robotic eye on pollution
- Grow a house with plant-robot hybrids
See all the latest robotics news on Robohub, or sign up for our weekly newsletter.








 The second panel featured talks on sector based solutions starting with the International Federation of the Red Cross (IFRC). The Federation (Aarathi) spoke about their joint project with WeRobotics; looking at cross-sectoral needs for various robotics solutions in the South Pacific. IFRC is exploring at the possibility of launching a South Pacific Flying Labs with a strong focus on women and girls. Pix4D (Lorenzo) addressed the role of aerial robotics in agriculture, giving concrete examples of successful applications while providing guidance to our Flying Labs Coordinators.
The second panel featured talks on sector based solutions starting with the International Federation of the Red Cross (IFRC). The Federation (Aarathi) spoke about their joint project with WeRobotics; looking at cross-sectoral needs for various robotics solutions in the South Pacific. IFRC is exploring at the possibility of launching a South Pacific Flying Labs with a strong focus on women and girls. Pix4D (Lorenzo) addressed the role of aerial robotics in agriculture, giving concrete examples of successful applications while providing guidance to our Flying Labs Coordinators. Panel number three addressed the transformation of transportation. UNICEF (Judith) highlighted the field tests they have been carrying out in Malawi; using cargo robotics to transport HIV samples in order to accelerate HIV testing and thus treatment. UNICEF has also launched an air corridor in Malawi to enable further field-testing of flying robots. MSF (Oriol) shared their approach to cargo delivery using aerial robotics. They shared examples from Papua New Guinea
Panel number three addressed the transformation of transportation. UNICEF (Judith) highlighted the field tests they have been carrying out in Malawi; using cargo robotics to transport HIV samples in order to accelerate HIV testing and thus treatment. UNICEF has also launched an air corridor in Malawi to enable further field-testing of flying robots. MSF (Oriol) shared their approach to cargo delivery using aerial robotics. They shared examples from Papua New Guinea









 I enjoyed talking at the Visual Localization session (another packed out session with standing room only) on our paper, “
I enjoyed talking at the Visual Localization session (another packed out session with standing room only) on our paper, “ The social functions were good and the conference hotel was incredible, especially the infinity pool at the top of the hotel, 57 floors up, looking over the Marina. The night safari was fun too.
The social functions were good and the conference hotel was incredible, especially the infinity pool at the top of the hotel, 57 floors up, looking over the Marina. The night safari was fun too. Overall, a great week and always great to reconnect with hundreds of colleagues and collaborators from around the world. See you next year in Brisbane!
Overall, a great week and always great to reconnect with hundreds of colleagues and collaborators from around the world. See you next year in Brisbane!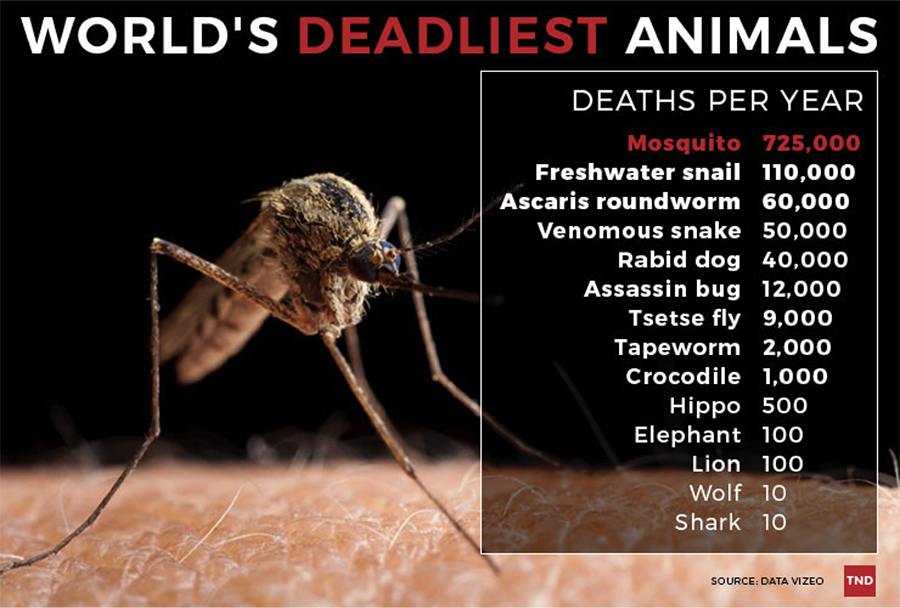 Mosquitos kill more humans every year than any other animal on the planet and conventional methods to reduce mosquito-borne illnesses haven’t worked as well as many hoped. So we’ve been hard at work since receiving this USAID grant six months ago to reduce Zika incidence and related threats to public health.
Mosquitos kill more humans every year than any other animal on the planet and conventional methods to reduce mosquito-borne illnesses haven’t worked as well as many hoped. So we’ve been hard at work since receiving this USAID grant six months ago to reduce Zika incidence and related threats to public health.
 Our approach seeks to complement and extend (not replace) these existing delivery methods. The challenge with manned aircraft is that they are expensive to operate and maintain. They may also not be able to target areas with great accuracy given the altitudes they have to fly at.
Our approach seeks to complement and extend (not replace) these existing delivery methods. The challenge with manned aircraft is that they are expensive to operate and maintain. They may also not be able to target areas with great accuracy given the altitudes they have to fly at. Cars are less expensive, but they rely on ground infrastructure. This can be a challenge in some corners of the world when roads become unusable due to rainy seasons or natural disasters. What’s more, not everyone lives on or even close to a road.
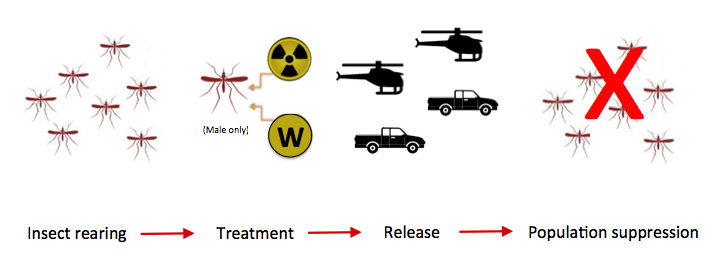
Cars are less expensive, but they rely on ground infrastructure. This can be a challenge in some corners of the world when roads become unusable due to rainy seasons or natural disasters. What’s more, not everyone lives on or even close to a road. Our IAEA colleagues thus envision establishing small mosquito breeding labs in strategic regions in order to release sterilized male mosquitos and reduce the overall mosquito population in select hotspots. The idea would be to use both ground and aerial release methods with cars and flying robots.
Our IAEA colleagues thus envision establishing small mosquito breeding labs in strategic regions in order to release sterilized male mosquitos and reduce the overall mosquito population in select hotspots. The idea would be to use both ground and aerial release methods with cars and flying robots.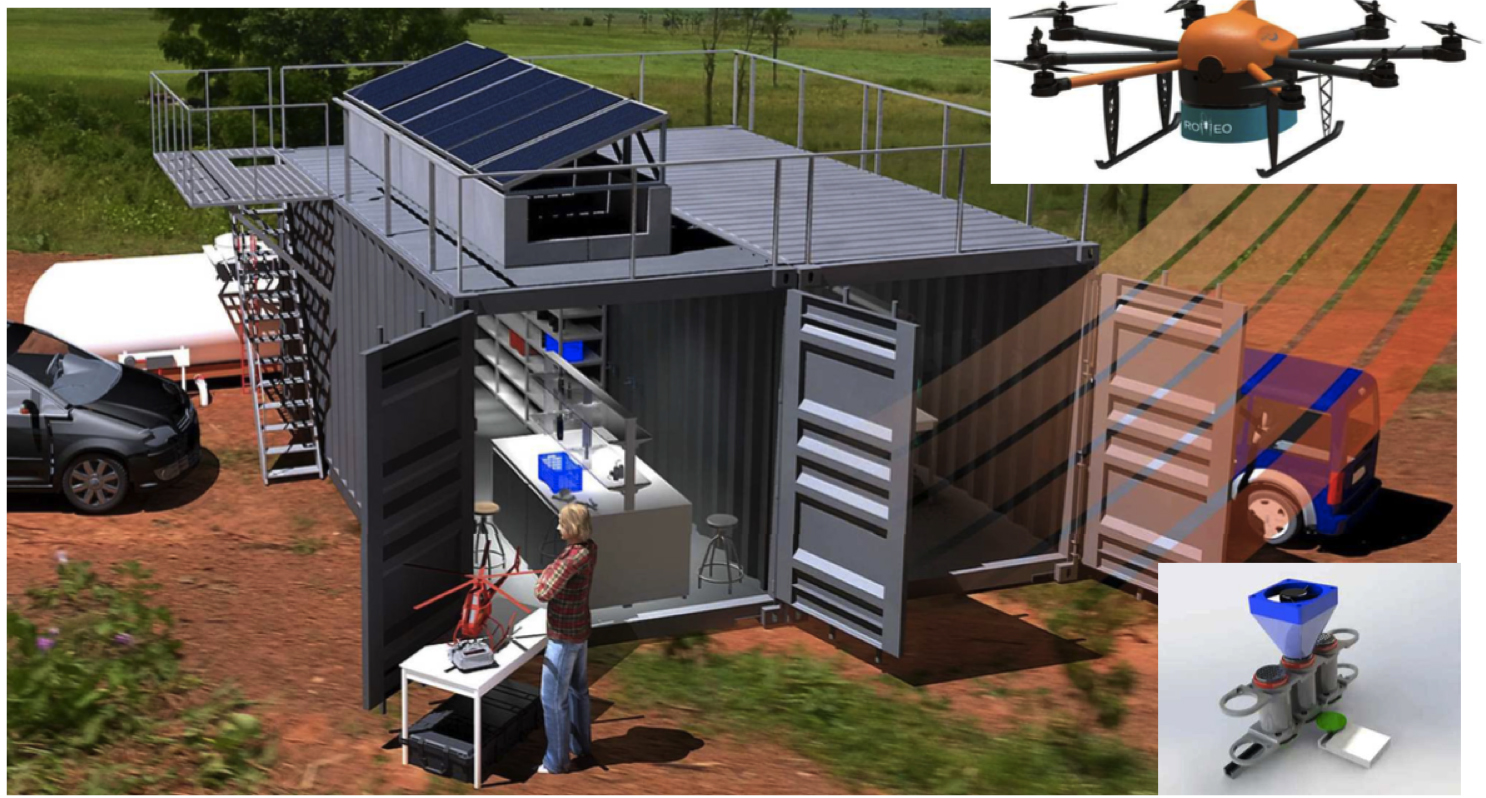 The real technical challenge here, besides breeding millions of sterilized mosquitos, is actually not the flying robot (drone/UAV) but rather the engineering that needs to go into developing a release mechanism that attaches to the flying robot. In fact, we’re more interested in developing a release mechanism that will work with any number of flying robots, rather than having a mechanism work with one and only one drone/UAV. Aerial robotics is evolving quickly and it is inevitable that drones/UAVs available in 6-12 months will have greater range and payload capacity than today. So we don’t want to lock our release mechanism into a platform that may be obsolete by the end of the year. So for now we’re just using a DJI Matrice M600 Pro so we can focus on engineering the release mechanism.
The real technical challenge here, besides breeding millions of sterilized mosquitos, is actually not the flying robot (drone/UAV) but rather the engineering that needs to go into developing a release mechanism that attaches to the flying robot. In fact, we’re more interested in developing a release mechanism that will work with any number of flying robots, rather than having a mechanism work with one and only one drone/UAV. Aerial robotics is evolving quickly and it is inevitable that drones/UAVs available in 6-12 months will have greater range and payload capacity than today. So we don’t want to lock our release mechanism into a platform that may be obsolete by the end of the year. So for now we’re just using a DJI Matrice M600 Pro so we can focus on engineering the release mechanism.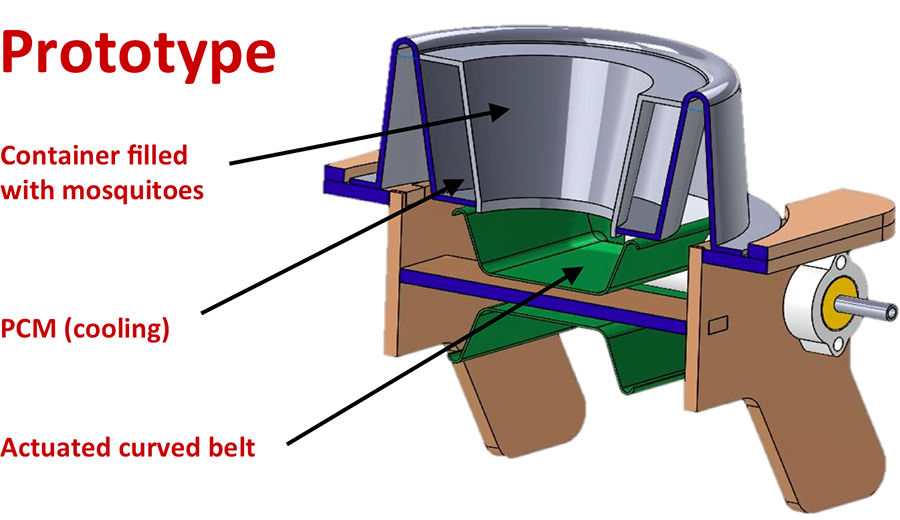 Developing this release mechanism is anything but trivial. Ironically, mosquitos are particularly fragile. So if they get damaged while being released, game over. What’s more, in order to pack one million mosquitos (about 2.5kg in weight) into a particularly confined space, they need to be chilled or else they’ll get into a brawl and damage each other, i.e., game over. (Recall the last time you were stuck in the middle seat in Economy class on a transcontinental flight). This means that the release mechanism has to include a reliable cooling system. But wait, there’s more. We also need to control the rate of release, i.e., to control how many thousands mosquitos are released per unit of space and time in order to drop said mosquitos in a targeted and homogenous manner. Adding to the challenge is the fact that mosquitos need time to unfreeze during free fall so they can fly away and do their thing, i.e., before they hit the ground or else, game over.
Developing this release mechanism is anything but trivial. Ironically, mosquitos are particularly fragile. So if they get damaged while being released, game over. What’s more, in order to pack one million mosquitos (about 2.5kg in weight) into a particularly confined space, they need to be chilled or else they’ll get into a brawl and damage each other, i.e., game over. (Recall the last time you were stuck in the middle seat in Economy class on a transcontinental flight). This means that the release mechanism has to include a reliable cooling system. But wait, there’s more. We also need to control the rate of release, i.e., to control how many thousands mosquitos are released per unit of space and time in order to drop said mosquitos in a targeted and homogenous manner. Adding to the challenge is the fact that mosquitos need time to unfreeze during free fall so they can fly away and do their thing, i.e., before they hit the ground or else, game over. We’ve already started testing our early prototype using “mosquito substitutes” like cumin and anise as the latter came recommended by mosquito experts. Next month, we’ll be at the FAO/IAEA Pest Control Lab in Vienna to test the release mechanism indoors using dead and live mosquitos. We’ll then have 3 months to develop a second version of the prototype before heading to Latin America to field test the release mechanism with our Peru Flying Labs. One of these tests will involve the the integration of the flying robot and the release mechanism in terms of both hardware and software. In other words, we’ll be testing the integrated system over different types of terrain and weather conditions in Peru specifically.
We’ve already started testing our early prototype using “mosquito substitutes” like cumin and anise as the latter came recommended by mosquito experts. Next month, we’ll be at the FAO/IAEA Pest Control Lab in Vienna to test the release mechanism indoors using dead and live mosquitos. We’ll then have 3 months to develop a second version of the prototype before heading to Latin America to field test the release mechanism with our Peru Flying Labs. One of these tests will involve the the integration of the flying robot and the release mechanism in terms of both hardware and software. In other words, we’ll be testing the integrated system over different types of terrain and weather conditions in Peru specifically.
 For now, though, our WeRobotics Engineering Team (below) is busy developing the prototype out of our Zurich office. So if you happen to be passing through, definitely let us know, we’d love to show you the latest and give you a demo. We’ll also be reaching out the Technical University of Peru who are members of our Peru Flying Labs to engage with their engineers as we get closer to the field tests in country.
For now, though, our WeRobotics Engineering Team (below) is busy developing the prototype out of our Zurich office. So if you happen to be passing through, definitely let us know, we’d love to show you the latest and give you a demo. We’ll also be reaching out the Technical University of Peru who are members of our Peru Flying Labs to engage with their engineers as we get closer to the field tests in country. As an aside, our USAID colleagues recently encouraged us to consider an entirely separate, follow up project totally independently of IAEA whereby we’d be giving rides to Wolbachia treated mosquitos. Wolbachia is the name of bacteria that is used to infect male mosquitos so they can’t reproduce. IAEA does not focus on Wolbachia at all, but other USAID grantees do. Point being, the release mechanism could have multiple applications. For example, instead of releasing mosquitos, the mechanism could scatter seeds. Sound far-fetched?
As an aside, our USAID colleagues recently encouraged us to consider an entirely separate, follow up project totally independently of IAEA whereby we’d be giving rides to Wolbachia treated mosquitos. Wolbachia is the name of bacteria that is used to infect male mosquitos so they can’t reproduce. IAEA does not focus on Wolbachia at all, but other USAID grantees do. Point being, the release mechanism could have multiple applications. For example, instead of releasing mosquitos, the mechanism could scatter seeds. Sound far-fetched?