Automated Managed Services roll out their upgraded automated ball return system, which handles ball washing and transportation back to the dispenser of golf balls
Established in late 2013, Automated Managed Services (AMS) have been offering driving range robots as an outfield maintenance solution to golf facilities. Their increasing success continues to reshape the idea of what golf maintenance should look and be like, as they rollout their newly redesigned ball return system across new and previous AMS locations.
The automated ball return system is responsible for the washing and transportation back to the dispenser of golf balls. It works in conjunction with the robot ballpicker that goes out and collects the balls out on the outfield. Once the robot is full it returns to its base and drops them into the return system. This process is fully automatic, from the time the balls are collected to being transported back to the dispenser, no human interaction is involved.
The design itself consists of a stainless steel ball drop zone that is shaped like half a diamond. This is installed into the ground and it is what the robot drops the balls into. The half diamond shape allows the balls to be funnelled towards the centre, at the base of the drop zone container is a slider that moves back and forth. With each back and forth motion the balls drop into u-bend shaped cage, this allows any debris such as small stones to fall away. Leaving the balls to roll into a connected green transportation pipe, where compressed air pushes the balls along back to the ball dispenser. During this transportation process water is introduced and the balls are cleaned. The return system is controlled via control panel that is usually located alongside the ball dispenser unit as well as the air compressor for the transportation pipe.
The design and development of the new system was undertaken by the owner of AMS Philip Sear and his technical director Sam Daybell. Philip had this to say about the ball return system:
“Research and development are a key component of our technology infrastructure, so we always strive to improve our products and services. With this in mind the new design is definitely more efficient in processing the balls and returning them to the dispenser. An example of this can be seen in the modification on how we use water in the system, we decided to only introduce water into transportation pipe. After previously also having it in the ball drop zone itself, this ensures water is used more resourcefully along with the balls being cleaned effectively. Overall we are very pleased with the new design as it continues our sustainability in offering a solution that streamlines resources and is cost-effective for our clients”
The new return system is currently being installed at FourAshes Golf Centre based in Solihull, who have been utilising robot technology at their facility for the past 4 years. It is also part of a new installation being undertaken at Grimsby Golf Club and was installed at High Legh Golf Club based in Knutsford.
About AMS Robot Technology Automated Managed Services provides golf ball and grass management for driving range facilities, designed to help to streamline resources, reduce costs and improve the overall health of golf driving range outfields.If you would like more information about the AMS’s Outfield Robots, please contact:
Just in time for Halloween, a research team from the MIT Media Lab’s Scalable Cooperation group has introduced Shelley: the world’s first artificial intelligence-human horror story collaboration.
Shelley, named for English writer Mary Shelley — best known as the author of “Frankenstein: or, the Modern Prometheus” — is a deep-learning powered artificial intelligence (AI) system that was trained on over 140,000 horror stories on Reddit’s infamous r/nosleep subreddit. She lives on Twitter, where every hour, @shelley_ai tweets out the beginning of a new horror story and the hashtag #yourturn to invite a human collaborator. Anyone is welcome to reply to the tweet with the next part of the story, then Shelley will reply again with the next part, and so on. The results are weird, fun, and unpredictable horror stories that represent both creativity and collaboration — traits that explore the limits of artificial intelligence and machine learning.
“Shelley is a combination of a multi-layer recurrent neural network and an online learning algorithm that learns from crowd’s feedback over time,” explains Pinar Yanardhag, the project’s lead researcher. “The more collaboration Shelley gets from people, the more and scarier stories she will write.”
Shelley starts stories based on the AI’s own learning dataset, but she responds directly to additions to the story from human contributors — which, in turn, adds to her knowledge base. Each completed story is then collected on the Shelley project website.
“Shelley’s creative mind has no boundaries,” the research team says. “She writes stories about a pregnant man who woke up in a hospital, a mouth on the floor with a calm smile, an entire haunted town, a faceless man on the mirror anything is possible!”
One final note on Shelley: The AI was trained on a subreddit filled with adult content, and the researchers have limited control over her — so parents beware.
In this episode, Jack Rasiel interviews Vijay Kumar, Professor and Dean of Engineering at the University of Pennsylvania. Kumar discusses the guiding ideas behind his research on micro unmanned aerial vehicles, gives his thoughts on the future of robotics in the lab and field, and speaks about setting realistic expectations for robotics technology.
Vijay Kumar
Vijay Kumar is the Nemirovsky Family Dean of Penn Engineering with appointments in the Departments of Mechanical Engineering and Applied Mechanics, Computer and Information Science, and Electrical and Systems Engineering at the University of Pennsylvania.
Dr. Kumar received his Bachelor of Technology degree from the Indian Institute of Technology, Kanpur and his Ph.D. from The Ohio State University in 1987. He has been on the Faculty in the Department of Mechanical Engineering and Applied Mechanics with a secondary appointment in the Department of Computer and Information Science at the University of Pennsylvania since 1987. In his time at the university, Dr. Kumar has held numerous positions including director of the GRASP Laboratory, Chairman of the Department of Mechanical Engineering and Applied Mechanics, and Deputy Dean for Education in the School of Engineering and Applied Science. From 2012 to 2013, he served as the assistant director of robotics and cyber physical systems at the White House Office of Science and Technology Policy.
Bills being considered by Congress deserve our attention—but not our full attention. To wit: When it comes to safety-related regulation of automated driving, existing law is at least as important as the bills currently in Congress (HB 3388 and SB 1885). Understanding why involves examining all the ways that the developer of an automated driving system might deploy its system in accordance with federal law as well as all the ways that governments might regulate that system. And this examination reveals some critical surprises.
As automated driving systems get closer to public deployment, their developers are closely evaluating how the full set of Federal Motor Vehicle Safety Standards (FMVSS) will apply to these systems and to the vehicles on which they are installed. Rather than specifying a comprehensive regulatory framework, these standards impose requirements on only some automotive features and functions. Furthermore, manufacturers of vehicles and of components thereof self-certify that their products comply with these standards. In other words, unlike its European counterparts (and a small number of federal agencies overseeing products deemed more dangerous than motor vehicles), the National Highway Traffic Safety Administration (NHTSA) does not prospectively approve most of the products it regulates.
There are at least seven (!) ways that the developer of an automated driving system could conceivably navigate this regulatory regime.
First, the developer might design its automated driving system to comply with a restrictive interpretation of the FMVSS. The attendant vehicle would likely have conventional braking and steering mechanisms as well as other accoutrements for an ordinary human driver. (These conventional mechanisms could be usable, as on a vehicle with only part-time automation, or they might be provided solely for compliance.) NHTSA implied this approach in its 2016 correspondence with Google, while another part of the US Department of Transportation even highlighted those specific FMVSS provisions that a developer would need to design around. Once the developer self-certifies that its system in fact complies with the FMVSS, it can market it.
Second, the developer might ask NHTSA to clarify the agency’s understanding of these provisions with a view toward obtaining a more accommodating interpretation. Previously—and, more to the point, under the previous administration—NHTSA was somewhat restrictive in its interpretation, but a new chief counsel might reach a different conclusion about whether and how the existing standards apply to automated driving. In that case, the developer could again simply self-certify that its system indeed complies with the FMVSS.
Third, the developer might petition NHTSA to amend the FMVSS to more clearly address (or expressly abstain from addressing) automated driving systems. This rulemaking process would be lengthy (measured in years rather than months), but a favorable result would give the developer even more confidence in self-certifying its system.
Fourth, the developer could lobby Congress to shorten this process—or preordain the result—by expressly accommodating automated driving systems in a statute rather than in an agency rule. This is not, by the way, what the bills currently in Congress would do.
Fifth, the developer could request that NHTSA exempt some of its vehicles from portions of the FMVSS. This exemption process, which is prospective approval by another name, requires the applicant to demonstrate that the safety level of its feature or vehicle “at least equals the safety level of the standard.” Under existing law, the developer could exempt no more than 2,500 new vehicles per year. Notably, however, this could include heavy trucks as well as passenger cars.
Sixth, the developer could initially deploy its vehicles “solely for purposes of testing or evaluation” without self-certifying that those vehicles comply with the FMVSS. Although this exception is available only to established automotive manufacturers, a new or recent entrant could partner with or outright buy one of the companies in that category. Many kinds of large-scale pilot and demonstration projects could be plausibly described as “testing or evaluation,” particularly by companies that are comfortable losing money (or comfortable describing their services as “beta”) for years on end.
Seventh, the developer could ignore the FMVSS altogether. Under federal law, “a person may not manufacture for sale, sell, offer for sale, introduce or deliver for introduction in interstate commerce, or import into the United States, any [noncomplying] motor vehicle or motor vehicle equipment.” But under the plain meaning of this provision (and a related definition of “interstate commerce”), a developer could operate a fleet of vehicles equipped with its own automated driving system within a state without certifying that those vehicles comply with the FMVSS.
This is the background law against which Congress might legislate—and against which its bills should be evaluated.
Both bills would dramatically expand the number of exemptions that NHTSA could grant to each manufacturer, eventually reaching 100,000 per year in the House version. Some critics of the bills have suggested that this would give free rein to manufactures to deploy tens of thousands of automated vehicles without any prior approval.
But considering this provision in context provides two key insights. First, automated driving developers may already be able to lawfully deploy tens of thousands of their vehicles without any prior approval—by designing them to comply with the FMVSS, by claiming testing or evaluation, or by deploying an in-state service. Second, the exemption process gives NHTSA far more power than it otherwise has: The applicant must convince the agency to affirmatively permit it to market its system.
Both bills would also require the manufacturer of an automated driving system to submit a “safety evaluation report” to NHTSA that “describes how the manufacturer is addressing the safety of such vehicle or system.” This requirement would formalize the safety assessment letters that NHTSA encouraged in its 2016 and 2017 automated vehicle policies. These three frameworks all evoke my earlier proposal for what I call the “public safety case,” wherein an automated driving developer tells the rest of us what they are doing, why they think it is reasonably safe, and why we should believe them.
Unsurprisingly, I think this is a fine idea. It encourages innovation in safety assurance and regulation, informs regulators, and—if disclosure is meaningful—helps educate the public at large. Congress could strengthen these provisions as currently drafted, and it could give NHTSA the resources needed to effectively engage with these reports. Regardless, in evaluating the bills, it is important to understand that these provisions increase rather than decrease what an automated driving system developer must do under federal law. They are an addition rather than an alternative to each of the seven pathways described above.
Both bills would also exclude heavy trucks and buses from their definitions of automated vehicle. This exclusion, added at the behest of labor groups concerned about the eventual implications of commercial truck automation, means that NHTSA cannot exempt tens of thousands of heavy vehicles per manufacturer from a safety standard. But each truck manufacturer can still seek to exempt up to 2,500 vehicles per year—if such an exemption is even required. And, depending on how language relating to the safety evaluation reports is interpreted, this exemption might even relieve automated truck manufacturers of the obligation to submit these reports.
Finally, these bills largely preserve NHTSA’s existing regulatory authority—and that authority involves much more than making rules and granting exemptions to those rules. Crucially, the agency can conduct investigations and pursue recalls—even if a vehicle fully complies with the applicable FMVSS. This is because ensuring motor vehicle safety requires more than satisfying specific safety standards. And this broader definition of safety—“the performance of a motor vehicle or motor vehicle equipment in a way that protects the public against unreasonable risk of accidents occurring because of the design, construction, or performance of a motor vehicle, and against unreasonable risk of death or injury in an accident, and includes nonoperational safety of a motor vehicle”—gives NHTSA great power.
States and the municipalities within them also play an important role in regulating road safety—and my next post considers the effect of the Senate bill in particular on this state and local authority.
New, hybrid RoboBee can fly, dive into water, swim, propel itself back out of water, and safely land. The RoboBee is retrofitted with four buoyant and a central gas collection chamber. Once the RoboBee swims to the surface, an electrolytic plate in the chamber converts water into oxyhydrogen, a combustible gas fuel. Credit: Wyss Institute at Harvard University By Leah Burrows
We’ve seen RoboBees that can fly, stick to walls, and dive into water. Now, get ready for a hybrid RoboBee that can fly, dive into water, swim, propel itself back out of water, and safely land.
New floating devices allow this multipurpose air-water microrobot to stabilize on the water’s surface before an internal combustion system ignites to propel it back into the air.
This latest-generation RoboBee, which is 1,000 times lighter than any previous aerial-to-aquatic robot, could be used for numerous applications, from search-and-rescue operations to environmental monitoring and biological studies.
The research is described in Science Robotics. It was led by a team of scientists from the Wyss Institute for Biologically Inspired Engineering at Harvard University and the Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS).
“This is the first microrobot capable of repeatedly moving in and through complex environments,” says Yufeng Chen, Ph.D., currently a Postdoctoral Fellow at the Wyss Institute who was a graduate student in the Microrobotics Lab at SEAS when the research was conducted and is the first author of the paper. “We designed new mechanisms that allow the vehicle to directly transition from water to air, something that is beyond what nature can achieve in the insect world.”
Designing a millimeter-sized robot that moves in and out of water has numerous challenges. First, water is 1,000 times denser than air, so the robot’s wing flapping speed will vary widely between the two mediums. If the flapping frequency is too low, the RoboBee can’t fly. If it’s too high, the wing will snap off in the water.
By combining theoretical modeling and experimental data, the researchers found the Goldilocks combination of wing size and flapping rate, scaling the design to allow the bee to operate repeatedly in both air and water. Using this multimodal locomotive strategy, the robot to flaps its wings at 220 to 300 hertz in air and nine to 13 hertz in water.
Another major challenge the team had to address: at the millimeter scale, the water’s surface might as well be a brick wall. Surface tension is more than 10 times the weight of the RoboBee and three times its maximum lift. Previous research demonstrated how impact and sharp edges can break the surface tension of water to facilitate the RoboBee’s entry, but the question remained: How does it get back out again?
To solve that problem, the researchers retrofitted the RoboBee with four buoyant outriggers — essentially robotic floaties — and a central gas collection chamber. Once the RoboBee swims to the surface, an electrolytic plate in the chamber converts water into oxyhydrogen, a combustible gas fuel.
“Because the RoboBee has a limited payload capacity, it cannot carry its own fuel, so we had to come up with a creative solution to exploit resources from the environment,” says Elizabeth Farrell Helbling, graduate student in the Microrobotics Lab and co-author of the paper. “Surface tension is something that we have to overcome to get out of the water, but is also a tool that we can utilize during the gas collection process.”
The gas increases the robot’s buoyancy, pushing the wings out of the water, and the floaties stabilize the RoboBee on the water’s surface. From there, a tiny, novel sparker inside the chamber ignites the gas, propelling the RoboBee out of the water. The robot is designed to passively stabilize in air, so that it always lands on its feet.
“By modifying the vehicle design, we are now able to lift more than three times the payload of the previous RoboBee,” says Chen. “This additional payload capacity allowed us to carry the additional devices including the gas chamber, the electrolytic plates, sparker, and buoyant outriggers, bringing the total weight of the hybrid robot to 175 miligrams, about 90mg heavier than previous designs. We hope that our work investigating tradeoffs like weight and surface tension can inspire future multi-functional microrobots – ones that can move on complex terrains and perform a variety of tasks.”
Because of the lack of onboard sensors and limitations in the current motion-tracking system, the RoboBee cannot yet fly immediately upon propulsion out of water but the team hopes to change that in future research.
“The RoboBee represents a platform where forces are different than what we – at human scale – are used to experiencing,” says Wyss Core Faculty Member Robert Wood, Ph.D., who is also the Charles River Professor of Engineering and Applied Sciences at Harvard and senior author of the paper. “While flying the robot feels as if it is treading water; while swimming it feels like it is surrounded by molasses. The force from surface tension feels like an impenetrable wall. These small robots give us the opportunity to explore these non-intuitive phenomena in a very rich way.”
The paper was co-authored by Hongqiang Wang, Ph.D., Postdoctoral Fellow at the Wyss Institute and SEAS; Noah Jafferis, Ph.D., Postdoctoral Fellow at the Wyss Institute; Raphael Zufferey, Postgraduate Researcher at Imperial College, London; Aaron Ong, Mechanical Engineer at the University of California, San Diego and former member of the Microrobotics Lab; Kevin Ma, Ph.D., Postdoctoral Fellow at the Wyss Institute; Nicholas Gravish, Ph.D., Assistant Professor at the University of California, San Diego and former member of the Microrobotics Lab; Pakpong Chirarattananon, Ph.D., Assistant Professor at the City University of Hong Kong and former member of the Microrobotics Lab; and Mirko Kovac, Ph.D., Senior Lecturer at Imperial College, London and former member of the Microrobotics Lab and Wyss Institute. It was supported by the National Science Foundation and the Wyss Institute for Biologically Inspired Engineering.
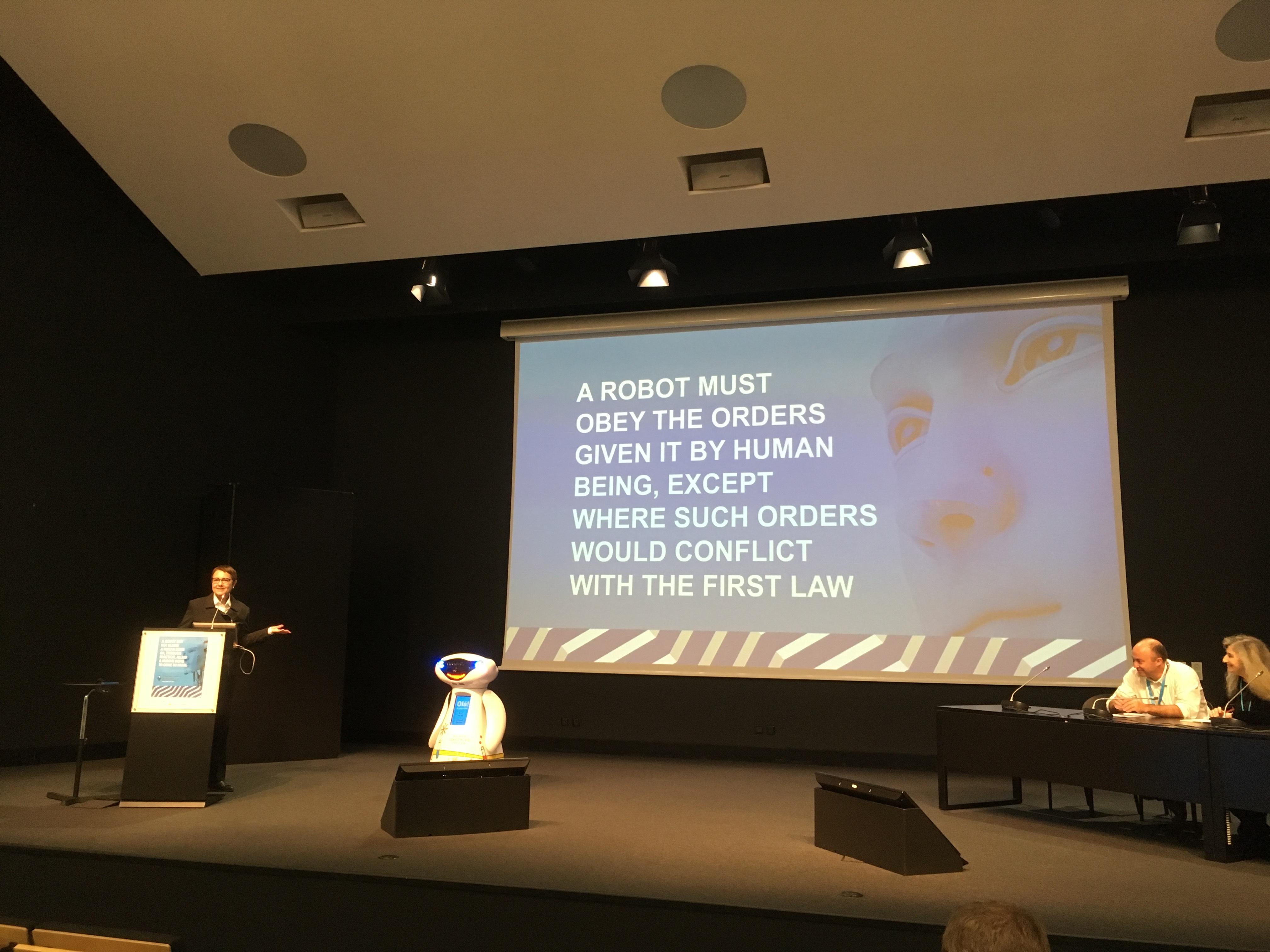
The International Conference on Robot Ethics and Safety Standards (ICRESS-2017) took place in Lisbon, Portugal, from 20th to 21st October 2017. Maria Isabel Aldinhas Ferreira and João Silva Sequeira coordinated the conference with the aim to create a vibrant multidisciplinary discussion around pressing safety, ethical, legal and societal issues of the rapid introduction of robotic technology in many environments.
There were several fascinating keynote presentations. Mathias Scheutz’ inaugural speech highlighted the need for robots to act in a way that would be perceived as using moral principles and judgement. It was refreshing to see that we could potentially have autonomous robots that arrive at appropriate decisions that would be seen as “right” or “wrong” by an external observer.
On the other hand, Rodolphe Gélin provided the perspective of robot manufacturers, and how difficult the issues of safety have become. The expectations of the public regarding robots seem to go beyond other conventional machines. The discussion was very diverse, and some suggested schemes similar to licensing would be required to qualify humans to operate robots (as they re-train them or re-program them). Other schemes for insurance and liabilities were suggested.
Professional bodies, experts and standards were discussed by the other two keynote presentations. Raja Chatila from the IEEE Global AI Ethics Initiative perspective, and Gurvinder Singh Virk from that of several ISO robot standardisation groups.
The conference also hosted a panel discussion, where interesting issues were debated like the challenges posed by the proliferation of drones in the general public. Such a topic has characteristics different from many other problems societies have faced with the introduction of new technologies. Drones can be 3D printed from many designs with potentially no liability to the designer, they can be operated with virtually no complex training, and they can be controlled from sufficient long distances that recuperating the drone would be insufficient to track the operator/owner. Their cameras and data recording can potentially be used to what some would consider privacy breaches, and they could compete for the space of already operating commercial aviation. It seems unclear what regulations and what bodies are to intervene and even so, how to enforce them. Would something similar happen when the public acquires pet-robots or artificial companions?
The presentations of accepted papers raised many issues, including the difficulties to create legal foundations for liability schemes and the responsibilities attributed to machines and operators. Particular aspects included the fact that for specific tasks, computers do significantly better than the average person (examples are driving a car and negotiation a curve). Other challenges are that humans will be in the proximity of robots on a regular basis in manufacturing or office environments with many new potential risks.
The vibrant nature of the conference concluded that the challenges are emerging much more rapidly than the answers.
We’ve also just launched a survey on software behaviours that an autonomous car should have when faced with difficult decisions. Just click here. Participants may win a prize, participation is completely voluntary and anonymous.
Many websites paint a very positive picture of the robocar future. And it is positive, but far from perfect. One problem I worry about in the short term is the way robocars are going to make traffic worse before they get a chance to make it better.
The goal of all robocars is to make car travel more pleasant and convenient, and eventually cheaper. You can’t make something better and cheaper without increasing demand for it, and that means more traffic.
This is particularly true for the early-generation pre-robocar vehicles in the plans of many major automakers. One of the first products these companies have released is sometimes called the “traffic jam assist.” This is a self-driving system that only works at low speed in a traffic jam.
Turns out that’s easy to do, effectively a solved problem. Low speed is inherently easier, and the highway is a simple driving environment without pedestrians, cyclists, intersections or cars going the other way. When you are boxed in with other cars in a jam, all you have to do is go with the flow. The other cars tell you where you need to go. Sometimes it can be complex when you get to whatever is blocking the road to cause the jam, but handoff to a human at low speeds is also fairly doable.
These products will be widely available soon, and they will make traffic jams much more pleasant. Which means there might be more of them.
I don’t have a 9 to 5 job, so I avoid travel in rush hour when I can. If somebody suggests we meet somewhere at 9am, I try to push it to 9:30 or 10. If I had a traffic jam assist car, I would be more willing to take the meeting at 9. When on the way, if I encountered a traffic jam, I would just think, “Ah, I can get some email done.”
After the traffic jam assist systems, come the highway systems which allow you to take your eyes off the road for an extended time. They arrive pretty soon, too. These will encourage slightly longer commutes. That means more traffic, and also changes to real estate values. The corporate-run commuter buses from Google, Yahoo and many other tech companies in the SF Bay Area have already done that, making people decide they want to live in San Francisco and work an hour’s bus ride away in Silicon Valley. The buses don’t make traffic worse, but those doing this in private cars will.
Is it all doom?
Fortunately, some factors will counter a general trend to worse traffic, particularly as full real robocars arrive, the ones that can come unmanned to pick you up and drop you off.
As robocars reduce accident levels, that will reduce one of the major causes of traffic congestion.
Robocars don’t need to slow down and stare at accidents or other unusual things on the road, which also causes congestion.
Robocars won’t overcompensate on “sags” (dips) in the road. This overcompensation on sags is the cause of almost half the traffic congestion on Japanese highways
Robocars look like they’ll be mainly electric. That doesn’t do much about traffic, but it does help with emissions.
Short-haul “last mile” robocars can actually make the use of trains, buses and carpools vastly more convenient.
Having only a few cars which drive more regularly, even something as simple as a good quality adaptive cruise control, actually does a lot to reduce congestion.
The rise of single person half-width vehicles promises a capacity increase, since when two find one another on the road, they can share the lane.
While it won’t happen in the early days, eventually robocars will follow the car in front of them with a shorter gap if they have a faster reaction time. This increases highway capacity.
Early robocars won’t generate a lot of carpooling, but it will pick up fairly soon (see below.)
What not to worry about
There are a few nightmare situations people have talked about that probably won’t happen. Today, a lot of urban driving involves hunting for parking. If we do things right, robocars won’t ever hunt for parking. They (and you) will be able to make an online query for available space at the best price and go directly do it. But they’ll do that after they drop you off, and they don’t need to park super close to your destination the way you need to. To incorporate city spaces into this market, a technology upgrade will be needed, and that may take some time, but private spaces can get in the game quickly.
What also won’t happen is people telling their car to drive around rather than park, to save money. Operating a car today costs about $20/hour, which is vastly more than any hourly priced parking, so nobody is going to do that to save money unless there is literally no parking for many miles. (Yes, there are parking lots that cost more than $20, but that’s because they sell you many hours or a whole day and don’t want a lot of in and out traffic. Robocars will be the most polite parking customers around, hiding valet-style at the back of the lot and leaving when you tell them.)
Another common worry is that people will send their cars on long errands unmanned. That mom might take the car downtown, and send it all the way back for dad to do a later commute, then back to pickup the kids at school. While that’s not impossible, it’s actually not going to be the cheap or efficient thing to do. Thanks to robotaxis, we’re going to start thinking of cars as devices that wear out by the mile, not by the year, and all their costs will be by the mile except parking and $2 of financing per day. All this unmanned operation will almost double the cost of the car, and the use of robotic taxi services (Robocar Uber) will be a much better deal.
There will be empty car moves, of course. But it should not amount to more than 15% of total miles. In New York, taxis are vacant of a passenger for 38% of miles, but that’s because they cruise around all day looking for fares. When you only move when summoned, the rate is much better.
And then it gets better
After this “winter” of increased traffic congestion, the outlook gets better. Aside from the factors listed above, in the long term we get the potential for several big things to increase road capacity.
The earliest is dynamic carpooling, as you see with services like UberPool and LyftLines. After all, if you look at a rush-hour highway, you see that most of the seats going by are empty. Tools which can fill these seats can increase the capacity of the roads close to three times just with the cars that are moving today.
The next is advanced robocar transit. The ability to make an ad-hoc, on-demand transit system that combines vans and buses with last mile single person vehicles in theory allows almost arbitrary capacity on the roads. At peak hours, heavy use of vans and buses to carry people on the common segments of their routes could result in a 10-fold (or even more) increase in capacity, which is more than enough to handle our needs for decades to come.
Next after that is dynamic adaptation of roads. In a system where cities can change the direction of roads on demand, you can get more than a doubling of capacity when you combine it with repurposing of street parking. On key routes, street parking can be reserved only for robocars prior to rush hour, and then those cars can be told they must leave when rush hour begins. (Chances are they want to leave to serve passengers anyway.) Now your road has seriously increased capacity, and if it’s also converted to one-way in the peak direction, you could almost quadruple it.
The final step does not directly involve robocars, since all cars must have a smartphone and participate for it to work. This is the use of smart, internet based road metering. With complete metering, you never get more cars trying to use a road segment than it has capacity to handle, and so you very rarely get traffic congestion. You also don’t get induced demand that is greater than the capacity, solving the bane of transportation planners.
For the first time, Humanoids 2017 is hosting a photo contest. We received 39 photos from robotics laboratories and institutes all over the world, showing humanoids in serious or funny contexts.
A jury composed of Erico Guizzo (IEEE Spectrum), Sabine Hauert (Robohub) and Giorgio Metta (Humanoids 2017 Awards Chair) will select the winning photos among those that will receive the more likes on social media.
The idea of using these media is to increase awareness and interest for humanoids and robotics among the public, as these photos can be easily shared and reach people outside the research and robotics field.
You can see and vote for all the photos on Facebook or below by liking the photos (make sure you look at all of them!). More information about the competition can be found here.
In recent years, self-driving cars have become a priority for automotive companies. BMW, Bosch, Google, Baidu, Toyota, GE, Tesla, Ford, Uber and Volvo are investing in autonomous driving research. Also, many new companies have appeared in the autonomous cars industry: Drive.ai, Cruise, nuTonomy, Waymo to name a few (read this post for a list of 260 companies involved in the self-driving industry).
The rapid development of this field has prompted a large demand for autonomous cars engineers. Among the skills required, knowing how to program with ROS is becoming an important one. You just have to visit the robotics-worldwide list to see the large amount of job offers for working/researching in autonomous cars, which demand knowledge of ROS.
Why ROS is interesting for autonomous cars
Robot Operating System (ROS) is a mature and flexible framework for robotics programming. ROS provides the required tools to easily access sensors data, process that data, and generate an appropriate response for the motors and other actuators of the robot. The whole ROS system has been designed to be fully distributed in terms of computation, so different computers can take part in the control processes, and act together as a single entity (the robot).
Due to these characteristics, ROS is a perfect tool for self-driving cars. After all, an autonomous vehicle can be considered as just another type of robot, so the same types of programs can be used to control them. ROS is interesting because:
1. There is a lot of code for autonomous cars already created. Autonomous cars require the creation of algorithms that are able to build a map, localize the robot using lidars or GPS, plan paths along maps, avoid obstacles, process pointclouds or cameras data to extract information, etc… Many algorithms designed for the navigation of wheeled robots are almost directly applicable to autonomous cars. Since those algorithms are already available in ROS, self-driving cars can just make use of them off-the-shelf.
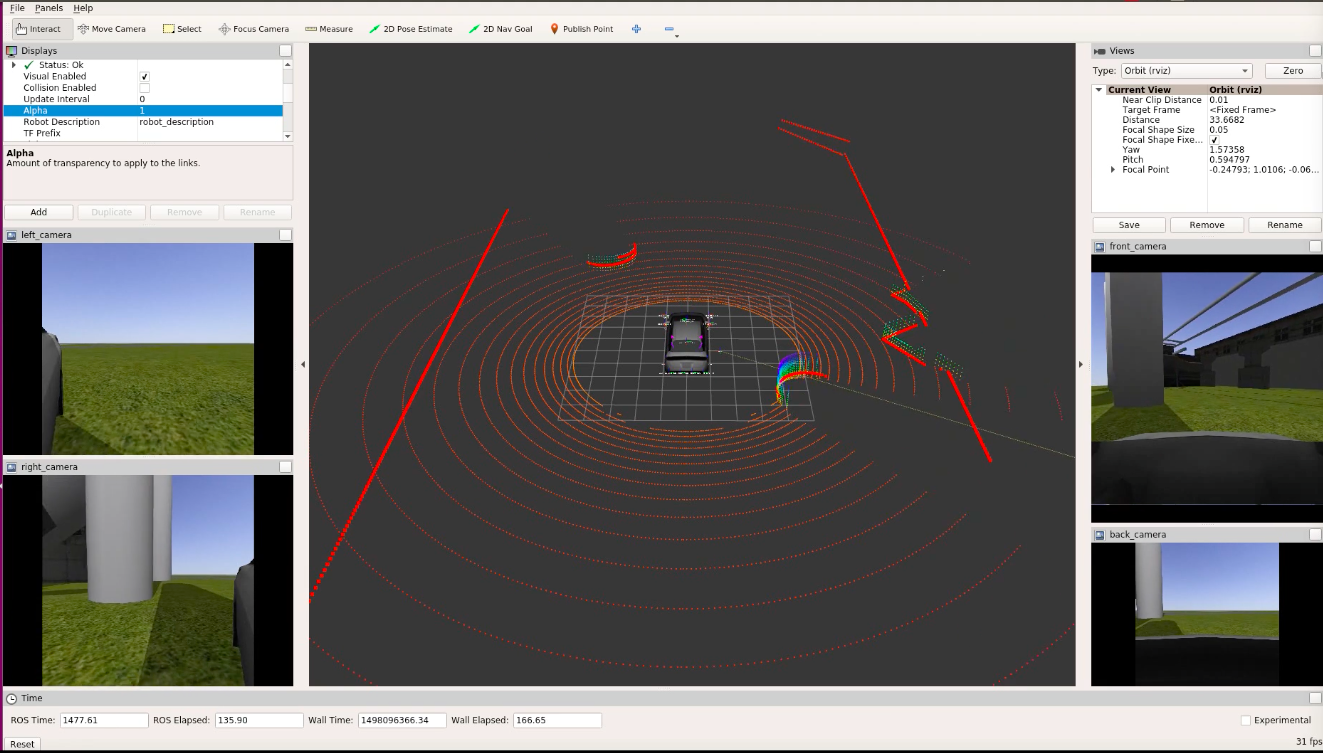
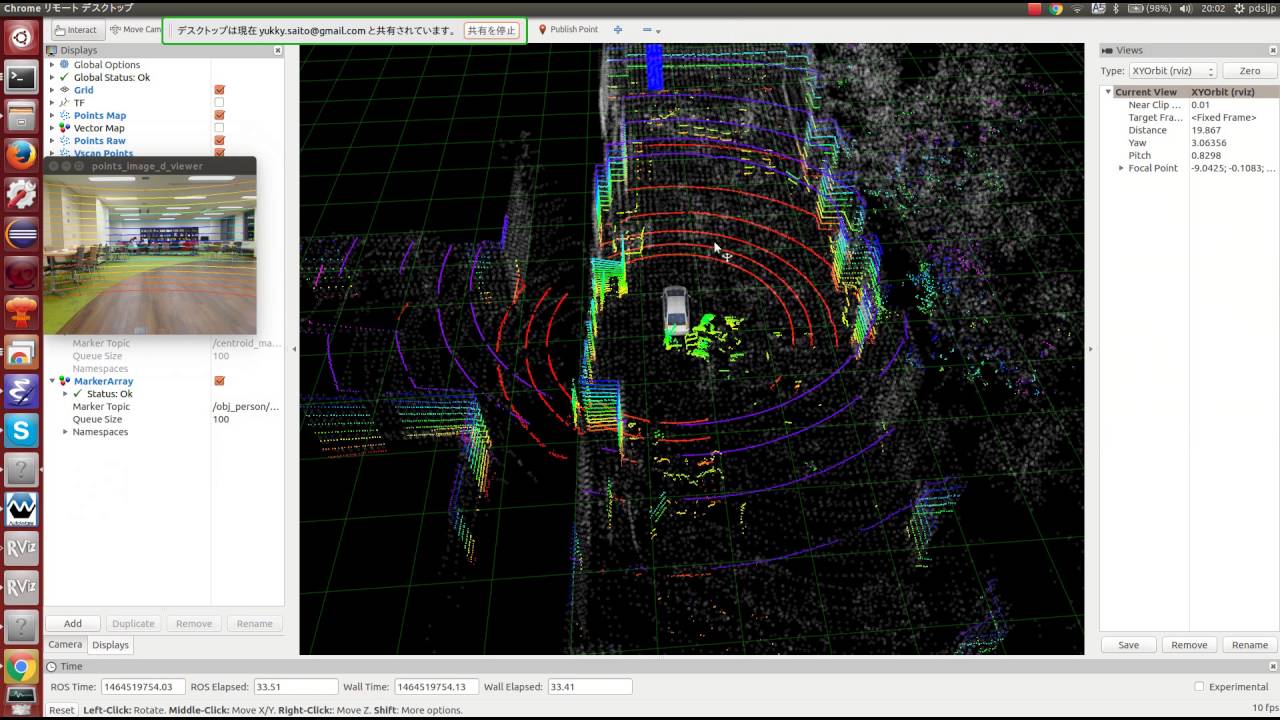
2. Visualization tools are already available. ROS has created a suite of graphical tools that allow the easy recording and visualization of data captured by the sensors, and representation of the status of the vehicle in a comprehensive manner. Also, it provides a simple way to create additional visualizations required for particular needs. This is tremendously useful when developing the control software and trying to debug the code.
3. It is relatively simple to start an autonomous car project with ROS onboard. You can start right now with a simple wheeled robot equipped with a pair of wheels, a camera, a laser scanner, and the ROS navigation stack. You’re set up in a few hours. That could serve as a basis to understand how the whole thing works. Then you can move to more professional setups, like for example buying a car that is already prepared for autonomous car experiments, with full ROS support (like the Dataspeed Inc. Lincoln MKZ DBW kit).
Self-driving car companies have identified those advantages and have started to use ROS in their developments. Examples of companies using ROS include BMW (watch their presentation at ROSCON 2015), Bosch or nuTonomy.
Weak points of using ROS
ROS is not all nice and good. At present, ROS presents two important drawbacks for autonomous vehicles:
1. Single point of failure. All ROS applications rely on a software component called the roscore. That component, provided by ROS itself, is in charge of handling all coordination between the different parts of the ROS application. If the component fails, then the whole ROS system goes down. This implies that it does not matter how well your ROS application has been constructed. If roscore dies, your application dies.
2. ROS is not secure. The current version of ROS does not implement any security mechanism for preventing third parties from getting into the ROS network and reading the communication between nodes. This implies that anybody with access to the network of the car can get to the ROS messaging and kidnap the car behavior.
All those drawbacks are expected to be solved in the newest version of ROS, ROS 2. Open Robotics, the creators of ROS have recently released a second beta of ROS 2 which can be tested here. It is expected there will be a release version by the end of 2017.
In any case, we believe that the ROS-based path to self-driving vehicles is the way to go. That is why, we propose a low budget learning path for becoming a self-driving cars engineer, based on the ROS framework.
Our low cost solution to become a self-driving car engineer
Step 1
First thing you need is to learn ROS. ROS is quite a complex framework to learn and requires dedication and effort. Watch the following video for a list of the 5 best methods to learn ROS. Learning basic ROS will help you understand how to create programs with that framework, and how to reuse programs made by others.
Step 2
Next, you need to get familiar with the basic concepts of robot navigation with ROS. Learning how the ROS navigation stack works will provide you the knowledge of basic concepts in navigation like mapping, path planning or sensor fusion. There is no better way to learn this than taking the ROS Navigation in 5 days course developed by Robot Ignite Academy (disclaimer – this is provided by my company The Construct).
Step 3
Third step would be to learn the basic ROS application to autonomous cars: how to use the sensors available in any standard of autonomous car, how to navigate using a GPS, how to generate an algorithm for obstacle detection based on the sensors data, how to interface ROS with the Can-bus protocol used in all the cars used in the industry…
The following video tutorial is ideal to start learning ROS applied to Autonomous Vehicles from zero. The course teaches how to program a car with ROS for autonomous navigation by using an autonomous car simulation. The video is available for free, but if you want to get the most of it, we recommend you to do the exercises at the same time by enrolling into the Robot Ignite Academy.
Step 4
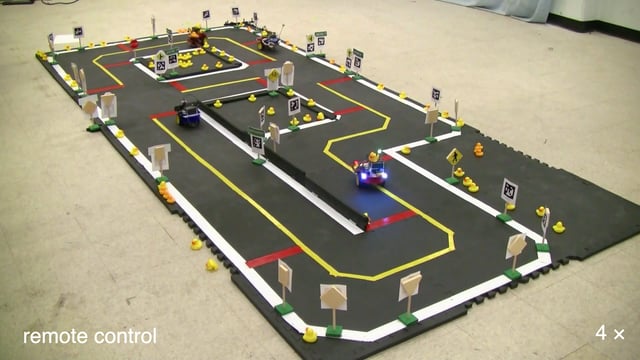
After the basic ROS for Autonomous Cars course, you should learn more advanced subjects like obstacles and traffic signals identification, road following, as well as coordination of vehicles in cross roads. For that purpose, our recommendation would be to use the Duckietown project at MIT. The project provides complete instructions to physically build a small size town, with lanes, traffic lights and traffic signals, to practice algorithms in the real world (even if at a small scale). It also provides instructions to build the autonomous cars that should populate the town. Cars are based on differential drives and a single camera for sensors. That is why they achieve a very low cost (around 100$ per each car). Image by Duckietown project
Due to the low monetary requirements, and to the good experience it offers for testing real stuff, the Duckietown project is ideal to start practicing autonomous cars concepts like line following based on vision, detecting other cars, traffic signal-based behavior. Still, if your budget is below that cost, you can use a Gazebo simulation of the Duckietown, and still practice most of the content.
Step 5
Then if you really want to go pro, you need to practice with real life data. For that purpose we propose you install and learn from the Autoware project. This project provides real data obtained from real cars on real streets, by means of ROS bags. ROS bags are logs containing data captured from sensors which can be used in ROS programs as if the programs were connected to the real car. By using those bags, you will be able to test algorithms as if you had an autonomous car to practice with (the only limitation is that the data is always the same and restricted to the situation that happened when it was recorded).
Image by the Autoware project
The Autoware project is an amazing huge project that, apart from the ROS bags, provides multiple state-of-the-art algorithms for localization, mapping, obstacles detection and identification using deep learning. It is a little bit complex and huge, but definitely worth studying for a deeper understanding of ROS with autonomous vehicles. I recommend you to watch the Autoware ROSCON2017 presentation for an overview of the system (will be available in October 2017).
Step 6
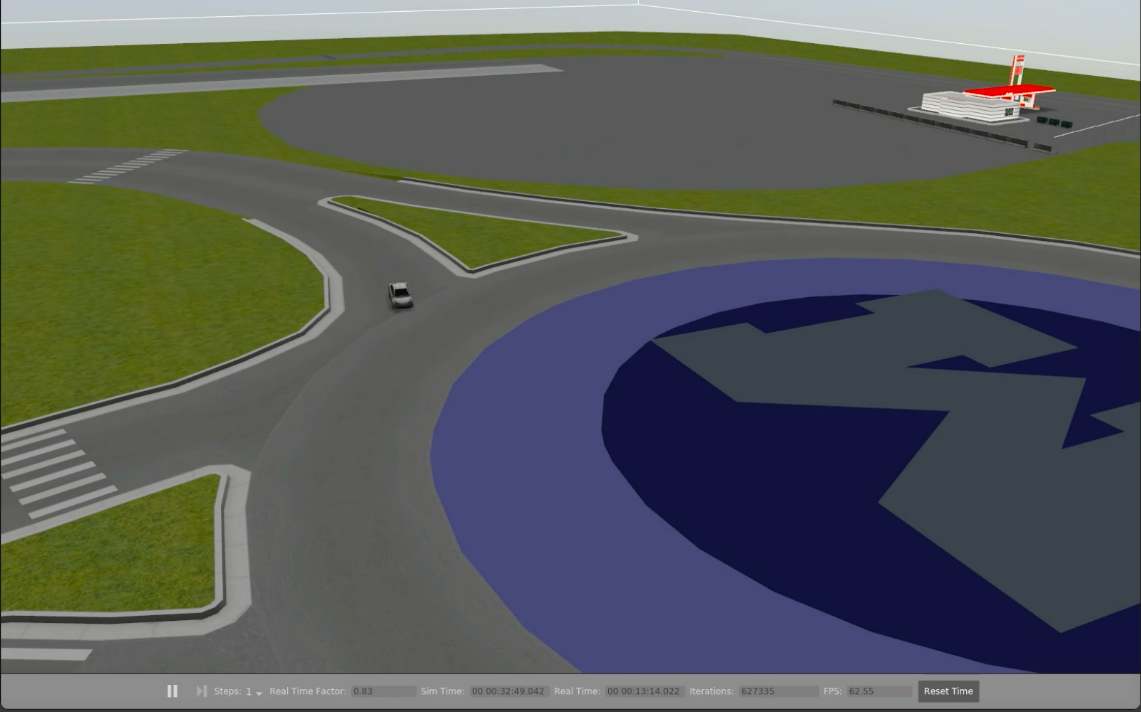
Final step would be to start implementing your own ROS algorithms for autonomous cars and testing them in different, realistic situations. Previous steps provided you with real-life situations, the bags were limited to the situations where they were recorded. Now it is time to test your algorithms in different situations. You can use already existing algorithms in a mix of all the steps above, but at some point, you will see that all those implementations lack some things required for your goals. You will have to start developing your own algorithms, and you will need lots of tests. For this purpose, one of the best options is to use a Gazebo simulation of an autonomous car as a testbed for your ROS algorithms. Recently, Open Robotics has released a simulation of cars for Gazebo 8 simulator. Image by Open Robotics
That simulation based on ROS contains a Prius car model, together with 16 beam lidar on the roof, 8 ultrasonic sensors, 4 cameras, and 2 planar lidar, which you can use to practice and create your own self-driving car algorithms. By using that simulation, you will be able to put the car in as many different situations as you want, checking if your algorithm works on those situations, and repeating as many times as you want until it works.
Conclusion
Autonomous driving is an exciting subject with demand for experienced engineers increasing year after year. ROS is one of the best options to quickly jump into the subject. So learning ROS for self-driving vehicles is becoming an important skill for engineers. We have presented here a full path to learn ROS for autonomous vehicles while keeping the budget low. Now it is your turn to make the effort and learn. Money is not an excuse anymore. Go for it!
As you know, Robohub is a non-profit dedicated to connecting the robotics community to the public. Over nearly a decade we’ve produced more than 200 podcasts and helped thousands of roboticists communicate about their work through videos and blog posts.
Our website Robohub.org provides free high-quality information, and is seen as a top blog in robotics with nearly 1.5M pageviews every year and 20k followers on social media (facebook, twitter).
If you have a story you would like to share (news, tutorials, papers, conference summaries), please send it to editors@robohub.org and we’ll do our best to help you reach a wide audience.
In addition, we’re currently growing our community of volunteers. If you’re interested in blogging, video/podcasting, moderating discussions, curating news, covering conferences, or helping with sustainability of our non-profit, we would love to hear from you!
By joining the community, you’ll be part of a grassroots international organisation. You’ll learn about robotics from the top people in the field, travel to conferences, and will improve your communication skills. More important, you’ll be helping us make sure robotics is portrayed in a high-quality manner to the public.
And thanks to all those who have already joined the community, supported us, or sent us their news!
Healthy humans take for granted their five senses. In order to mold metal into perceiving machines, it requires a significant amount of engineers and capital. Already, we have handed over many of our faculties to embedded devices in our cars, homes, workplaces, hospitals, and governments. Even automation skeptics unwillingly trust the smart gadgets in their pockets with their lives.
Last week, General Motors stepped up its autonomous car effort by augmenting its artificial intelligence unit, Cruise Automation, with greater perception capabilities through the acquisition of LIDAR (Light Imaging, Detection, And Ranging) technology company Strobe. Cruise was purchased with great fanfare last year by GM for a billion dollars. Strobe’s unique value proposition is shrinking its optical arrays to the size of a microchip, thereby substantially reducing costs of a traditionally expensive sensor that is critical for autonomous vehicles measuring the distances of objects on the road. Cruise CEO Kyle Vogt wrote last week on Medium that “Strobe’s new chip-scale LIDAR technology will significantly enhance the capabilities of our self-driving cars. But perhaps more importantly, by collapsing the entire sensor down to a single chip, we’ll reduce the cost of each LIDAR on our self-driving cars by 99%.”
GM is not the first Detroit automaker aiming to reduce the costs of sensors on the road; last year Ford invested $150 million in Velodyne, the leading LIDAR company on the market. Velodyne is best known for its rotation sensor that is often mistaken for a siren on top of the car. In describing the transaction, Raj Nair, Ford’s Executive Vice President, Product Development and Chief Technical Officer, said “From the very beginning of our autonomous vehicle program, we saw LIDAR as a key enabler due to its sensing capabilities and how it complements radar and cameras. Ford has a long-standing relationship with Velodyne and our investment is a clear sign of our commitment to making autonomous vehicles available for consumers around the world.” As the race heats up for competing perception technologies, LIDAR startups is already a crowded field with eight other companies (below) competing to become the standard vision for autonomous driving.
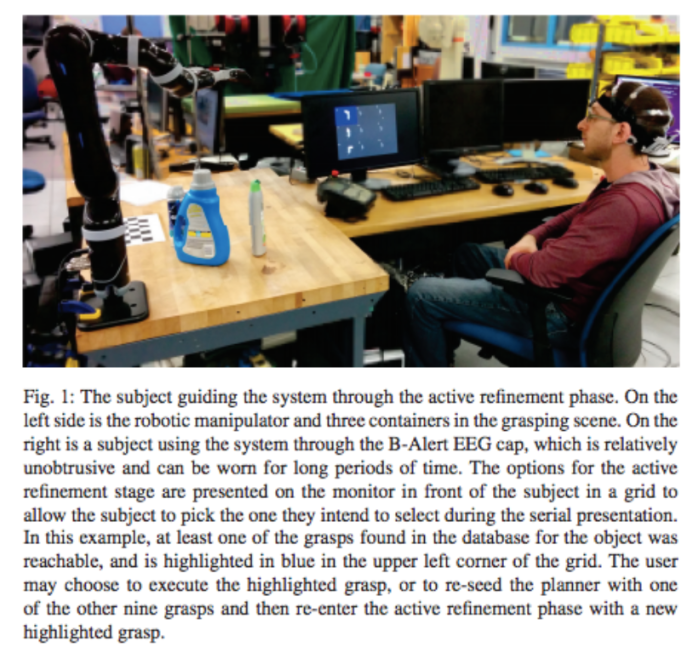
Walking the halls of Columbia University’s engineering school last week, I visited a number of the robotic labs working on the next generation of sensing technology. Dr. Peter Allen, Professor of Computer Science, is the founder of the Columbia Grasp Database, whimsically called GraspIt!, that enables robots to better recognize and pickup everyday objects. GraspIt! provides “an architecture to enable robotic grasp planning via shape completion.” The open source GraspIt! database has over 440,000 3D representations of household articles from varying viewpoints, which are used to train its “3D convolutional neural network (CNN).” According to the Lab’s IEEE paper published earlier this year, the CNN is able to serve up “a 2.5D pointcloud” capture of “a single point of view” of each item, which then “fills in the occluded regions of the scene, allowing grasps to be planned and executed on the completed object” (see diagram below). As Dr. Allen demonstrated last week, the CNN is able to perform as successfully in live scenarios with a robots “seeing” an object for the first time, as it does in computer simulations.
Taking a novel approach in utilizing their cloud-based data platform, Allen’s team now aims to help quadriplegics better navigate their world with assistive robots. Typically, a quadriplegic is reliant on human aids to perform even the most basic functions like eating and drinking, however Brain-Computer Interfaces (BCI) offer the promise of independence with a robot. Wearing a BCI helmet, Dr. Allen’s grad student was able to move a robot around the room by just looking at objects on screen. The object on the screen triggers electroencephalogram (EGG) waves that are admitted to the robot which translates the signals into pointcloud images on the database. According to their research, “Noninvasive BCI’s, which are very desirable from a medical and therapeutic perspective, are only able to deliver noisy, low-bandwidth signals, making their use in complex tasks difficult. To this end, we present a shared control online grasp planning framework using an advanced EEG-based interface…This online planning framework allows the user to direct the planner towards grasps that reflect their intent for using the grasped object by successively selecting grasps that approach the desired approach direction of the hand. The planner divides the grasping task into phases, and generates images that reflect the choices that the planner can make at each phase. The EEG interface is used to recognize the user’s preference among a set of options presented by the planner.”
While technologies like LIDAR and GraspIt! enable robots to better perceive the human world, in the basement of the SEAS Engineering Building at Columbia University, Dr. Matei Ciocarlie is developing an array of affordable tactile sensors for machines to touch & feel their environments. Humans have very complex multi-modal systems that are built through trial & error knowledge gained since birth. Dr. Ciocarlie ultimately aims to build a robotic gripper that has the capability of a human hand. Using light signals, Dr. Ciocarlie has demonstrated “sub-millimeter contact localization accuracy” of the mass object to determine the force applied to picking it up. At Columbia’s Robotic Manipulation and Mobility Lab (ROAM), Ciocarlie is tackling “one of the key challenges in robotic manipulation” by figuring out how “you reduce the complexity of the problem without losing versatility.” While demonstrating a variety of new grippers and force sensors which are being deployed in such hostile environments as the International Space Station and a human’s cluttered home, the most immediately promising innovation is Ciocarlie’s therapeutic robotic hand (shown below).
According to Ciocarlie’s paper: “Fully wearable hand rehabilitation and assistive devices could extend training and improve quality of life for patients affected by hand impairments. However, such devices must deliver meaningful manipulation capabilities in a small and lightweight package In experiments with stroke survivors, we measured the force levels needed to overcome various levels of spasticity and open the hand for grasping using the first of these configurations, and qualitatively demonstrated the ability to execute fingertip grasps using the second. Our results support the feasibility of developing future wearable devices able to assist a range of manipulation tasks.”
Across the ocean, Dr. Hossam Haick of Technion-Israel Institute of Technology has built an intelligent olfactory system that can diagnose cancer. Dr. Haick explains, “My college roommate had leukemia, and it made me want to see whether a sensor could be used for treatment. But then I realized early diagnosis could be as important as treatment itself.” Using an array of sensors composed of “gold nanoparticles or carbon nanotube” patients breath into a tube that detects cancer biomarkers through smell. “We send all the signals to a computer, and it will translate the odor into a signature that connects it to the disease we exposed to it,” says Dr. Haick. Last December, Haick’s AI reported an 86% accuracy in predicting cancers in more than 1,400 subjects in 17 countries. The accuracy increased with use of its neural network in specific disease cases. Haick’s machine could one day have better olfactory senses than canines, which have been proven to be able sniff out cancer.
When writing this post on robotic senses, I had several conversations with Alexa and I am always impressed with her auditory processing skills. It seems that the only area in which humans will exceed robots will be taste; however I am reminded of Dr. Hod Lipson’s food printer. As I watched Lipson’s concept video of the machine squirting, layering, pasting and even cooking something that resembled Willie Wonka’s “Everlasting Gobstopper,” I sat back in his Creative Machines Lab realizing that Sci-Fi is no longer fiction.
Want to know more about LIDAR technology and self-driving systems? Join RobotLab’s next forum on “The Future of Autonomous Cars” with Steve Girsky formerly of General Motors – November 29th @ 6pm, WeWork Grand Central NYC, RSVP.
Despite recent attempts to tease the robotics projects incubating at its Google X skunkworks, industry observers say that Google has done more to stifle than advance innovation in robotics.
A bit of history
On December 4th, 2013, John Markoff, a technology reporter for The New York Times, broke the story that Google had acquired seven robotic companies and that Andy Rubin, of Android fame, would be heading the group. Schaft, a Japanese start-up developing a humanoid robot; Industrial Perception, a Silicon Valley start-up that developed a computer vision system for loading and unloading trucks; Meka Robotics, a robot developer for academia; Redwood Robotics, a start-up intended to compete with the Baxter robot (and others) entering the small and medium-sized shop and factory marketplace; Bot & Dolly, a maker of robotic camera systems used for special effects such as in the movie “Gravity;” Autofuss, a design and marketing firm and a partner in Bot & Dolly; and Holomni, a maker of powered caster modules for omnidirectional vehicles.
On December 14th, 2013, Markoff followed up with the news that Google had added to its new stable of robotic companies by acquiring Boston Dynamics, a 20-year old developer of mobile and off-road robotics and human simulation technology mostly for DARPA and the Department of Defense.
Thus some of the leading startups in the industry and the whole 80+ talent pool from Boston Dynamics became part of Google. According to Markoff quoting Rubin,
“The company’s initial market will be in manufacturing, e.g., electronics assembly which is mostly done by hand. Manufacturing and logistics markets not being served by today’s robotic technologies are clear opportunity markets and the new Google robots will be able to automate any or all of the processes from the supply chain to the distribution channels to the consumer’s front door thereby creating a massive opportunity.”
The eight acquisitions were the talk of the business news but one piece from SFGate Tech Chronicles quoting Brian Gerkey described the positive sentiment best:
“Google’s move into robotics is likely to draw renewed attention and money into the space. It’s a pretty exciting day for robotics when someone like Google makes an investment like that in robots, others are likely to follow suit. It can only spur investment and innovation.”
Sales, vesting, transfers and departures
From 2014 to 2016 there were rumors and some media attention to the difficulties Google was having coordinating the talents within their robotic acquisitions, particularly after Rubin left and Google let it be known that they wanted to sell off Boston Dynamics because “their two- and four-legged robots were too far from being marketable.” Commercial projects were discussed but none came to fruition. People started to leave or move over to other parts of Google and GoogleX. Of the people that came from the 2013 acquisitions, some have left saying that the lack of direction and management had thwarted their desire to stay and contribute. Others have stayed but let it be known they’ll be available after their four-year sign-on stock options vest which will happen later this year.
In 2015 and 2016 the news of dissent continued as the name and group managers changed. No products emerged. James Kuffner led the robotics group until he left in January, 2016 to become the CTO of the Toyota Research Institute. Aaron Edsinger followed, but then he too left.
In June of 2017 Google finally found a buyer for Boston Dynamics – SoftBank. SoftBank also bought Schaft, a Japan-based startup whose walking robots never integrated into Google and, like Boston Dynamics, operated separately from the rest of Google’s robotics acquisitions.
For SoftBank, which acquired Aldebaran in 2012 and helped them make the humanoid robot Pepper, the two acquisitions offer mobility and robotics talent as SoftBank grows its SoftBank Robotics joint venture with Alibaba and Foxconn.
“None of the acquired companies have robots in use beyond the offices of Google’s now-parent company, Alphabet Inc. At least three key robotics chiefs who joined in that 2013 wave left the company in the last few months, and, because four years is the typical vesting period for Google stock options, they probably won’t be the last. At this point, the exodus counts as a win for robotics, since many of the brightest minds in the field have essentially spent the past few years trapped in a time capsule. Ultimately, Google’s run on roboticists held the industry back more than moving it forward.”
Google today
Google hasn’t entirely receded from robotics. There is Waymo, Alphabet’s autonomous-car division, and Titan (renamed Project Loon), Google’s drone development project. In fact, Project Loon balloons are being used today in Puerto Rico to provide stationary platforms from which emergency Internet and web services are available. Additionally, GoogleX has operated their “arm farm,” a room full of robotic arms that are learning to grasp and manipulate random objects and teach the other robots in the room how to do the same. In a recent GoogleX blog, Hans Peter Brondmo, who now heads up Google’s remaining robotics team, said:
We’re working with the Google Brain team to explore how to teach robots new skills by learning from their shared experience, and we’re even simulating robots in the cloud so they can train fast, and then we’re transferring this learning onto real robots. By having virtual robots we can gather lots of data for training in the cloud. Then we transfer what the virtual robots learn to the real-world robots so they can quickly learn to perform new tasks. This is all critical research that will pave the (long) path toward building machines that can learn new skills quickly and operate safely and cost effectively in the world we live in.”
Bottom line
Rumors abound about the value of Google’s ant farm (the room where a dozen or more robot arms are using machine learning and swarm control to pick and place random objects which Brondmo described in his blog). But so far, except for those that have left or moved over to Waymo, nothing but research has come from the 3-1/2 years Google has had a robotics group. Unless you count the years of anxiety, secrecy and disappointment for all those super-smart entrepreneurs that initially had hoped for so much of their new association with Google.
But as Brian Gerkey said, “…when someone like Google makes an investment like that in robots, others are likely to follow suit. It can only spur investment and innovation.” That has happened in spades! 2015, 2016 and 2017 have all shown exponential growth in investments and strategic acquisitions for the robotics industry.
NEDO, Japan’s New Energy and Industrial Technology Development Organization, is a regular funder of robotic technology, has an office in Silicon Valley, and participates in various regional events to promote its work and future programs. One such event was Robots on the Rise: The Future of Robotics in Japan and the US held October 16th in Mountain View, CA and jointly sponsored by Silicon Valley Forum.
Over 400 people attended the all-day series of panels with well-known speakers and relevant subject matter. Panels covered mobility, agricultural robotics, search and rescue, and the retail and manufacturing revolutions. Henrick Christensen from UC San Diego gave an overview of robotics in Japan and the US as a keynote. He described the key drivers propelling the robotics industry forward and the digitization of manufacturing: mass customization, unmanned vehicles, the aging society (particularly in Japan), and the continuing need for application-specific integrators.
He was followed by Atsushi Yasuda from METI, Japan’s Ministry of Economy, Trade and Industry (the agency that funds NEDO) who emphasized Japan’s need to focus on technologies that can safely assist their aging population. Manufacturing, agriculture, nursing and medical care, plus disaster relief were points he detailed.
I was the moderator of a panel on The Manufacturing Revolution: Automated Factories with speakers from Yaskawa (Chetan Kapoor), Yamaha (Hiro Sauou), OMRON/Adept (Edwardo De Robbio), GE (Steve Taub) and VEO Robotics (Patrick Sobalvarro). Trends in this arena are being driven by the global movement toward mass customization and the need for flexibility in automation and robotics. For the next while that flexibility will use humans in the loop to collaborate with their robot counterparts.
There was also an exhibition with around 25 companies and agencies participating in a pop-up type of trade show. It was noisy, fun and informative.
Best line from the investment panel: “Invest in missionaries; not mercenaries.”
Second best line came from Henrik Christensen regarding measuring the successfulness of home robots by their “time to boredom.”
Most interesting question and answer about the future came from James Kuffner, the CTO of Toyota Research Institute who said that Toyota asked the Institute what the company should to do after self-driving reduces the size of the car industry. Kuffner said that Toyota decided to “pivot to robotics and particularly to assistance robots for health, elder and home care.”
In the panel on unmanned vehicles, the consensus was that mapping, proprietary driving data, regulation and weather were all holdups thwarting fully autonomous vehicles (Level 5 vehicles (without pedals or a steering wheel)). Because of those problems, it was their opinion that only Level 4 would be achieved in the next decade.
NEDO’s 2017 fundings total $1.17 billion and include $99.1 million for robot technology seed and mid-term fundings for practical robotic solutions. Current projects include infrastructure inspection and maintenance, disaster response robots, elder care robots, and next-generation technologies in industrial and service robots and AI.
In episode ten of season three we talk about the rate of change (prompted by Tim Harford), take a listener question about the power of kernels, and talk with Peter Donnelly in his capacity with the Royal Society’s Machine Learning Working Group about the work they’ve done on the public’s views on AI and ML.
If you enjoyed this episode, you may also want to listen to:
The face of the father of quantum physics, Max Planck, emerges from a flat disk. In each state, the colors show the growth factors of the top (left) and bottom (right) layer, and the thin black lines indicate the direction of growth. The top layer is viewed from the front, and the bottom layer is viewed from the back, to highlight the complexity of the geometries. Credit: Harvard SEAS By Leah Burrows
Nature has a way of making complex shapes from a set of simple growth rules. The curve of a petal, the swoop of a branch, even the contours of our face are shaped by these processes. What if we could unlock those rules and reverse engineer nature’s ability to grow an infinitely diverse array of shapes?
Scientists from Harvard’s Wyss Institute for Biologically Inspired Engineering and the Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) have done just that. In a paper published in the Proceedings of the National Academy of Sciences, the team demonstrates a technique to grow any target shape from any starting shape.
“Architect Louis Sullivan once said that ‘form ever follows function’,” said L. Mahadevan, Ph.D., Associate Faculty member at the Wyss Institute and the Lola England de Valpine Professor of Applied Mathematics, of Organismic and Evolutionary Biology and of Physics and senior author of the study. “But if one took the opposite perspective, that perhaps function should follow form, how can we inverse design form?”
In previous research, the Mahadevan group used experiments and theory to explain how naturally morphing structures — such as Venus flytraps, pine cones and flowers — changed their shape in the hopes of one day being able to control and mimic these natural processes. And indeed, experimentalists have begun to harness the power of simple, bioinspired growth patterns. For example, in 2016, in a collaboration with the group of Jennifer Lewis, a Wyss Institute Core Faculty member and the Hansjörg Wyss Professor of Biologically Inspired Engineering at SEAS, the team printed a range of structures that changed its shape over time in response to environmental stimuli.
“The challenge was how to do the inverse problem,” said Wim van Rees, Ph.D., a postdoctoral fellow at SEAS and first author of the paper. “There’s a lot of research on the experimental side but there’s not enough on the theoretical side to explain what’s actually happening. The question is, if I want to end with a specific shape, how do I design my initial structure?”
Inspired by the growth of leaves, the researchers developed a theory for how to pattern the growth orientations and magnitudes of a bilayer, two different layers of elastic materials glued together that respond differently to the same stimuli. By programming one layer to swell more and/or in a different direction than the other, the overall shape and curvature of the bilayer can be fully controlled. In principle, the bilayer can be made of any material, in any shape, and respond to any stimuli from heat to light, swelling, or even biological growth.
The team unraveled the mathematical connection between the behavior of the bilayer and that of a single layer.
“We found a very elegant relationship in a material that consists of these two layers,” said van Rees. “You can take the growth of a bilayer and write its energy directly in terms of a curved monolayer.”
That means that if you know the curvatures of any shape you can reverse engineer the energy and growth patterns needed to grow that shape using a bilayer.
“This kind of reverse engineering problem is notoriously difficult to solve, even using days of computation on a supercomputer,” said Etienne Vouga, Ph.D., former postdoctoral fellow in the group and now an Assistant Professor of Computer Science at the University of Texas at Austin. “By elucidating how the physics and geometry of bilayers are intimately coupled, we were able to construct an algorithm that solves the needed growth pattern in seconds, even on a laptop, no matter how complicated the target shape.”
A snapdragon flower petal starting from a cylinder. In each state, the colors show the growth factors of the top (left) and bottom (right) layer, and the thin black lines indicate the direction of growth. The top layer is viewed from the front, and the bottom layer is viewed from the back, to highlight the complexity of the geometries. Credit: Harvard SEAS
The researchers demonstrated the system by modeling the growth of a snapdragon flower petal from a cylinder, a topographical map of the Colorado river basin from a flat sheet and, most strikingly, the face of Max Planck, one of the founders of quantum physics, from a disk.
“Overall, our research combines our knowledge of the geometry and physics of slender shells with new mathematical algorithms and computations to create design rules for engineering shape,” said Mahadevan. “It paves the way for manufacturing advances in 4-D printing of shape-shifting optical and mechanical elements, soft robotics as well as tissue engineering.”
The researchers are already collaborating with experimentalists to try out some of these ideas.
This research was funded in part by the Swiss National Science Foundation and the US National Science Foundation.


 Bills being considered by Congress deserve our attention—but not our full attention. To wit: When it comes to safety-related regulation of automated driving, existing law is at least as important as the bills currently in Congress (
Bills being considered by Congress deserve our attention—but not our full attention. To wit: When it comes to safety-related regulation of automated driving, existing law is at least as important as the bills currently in Congress (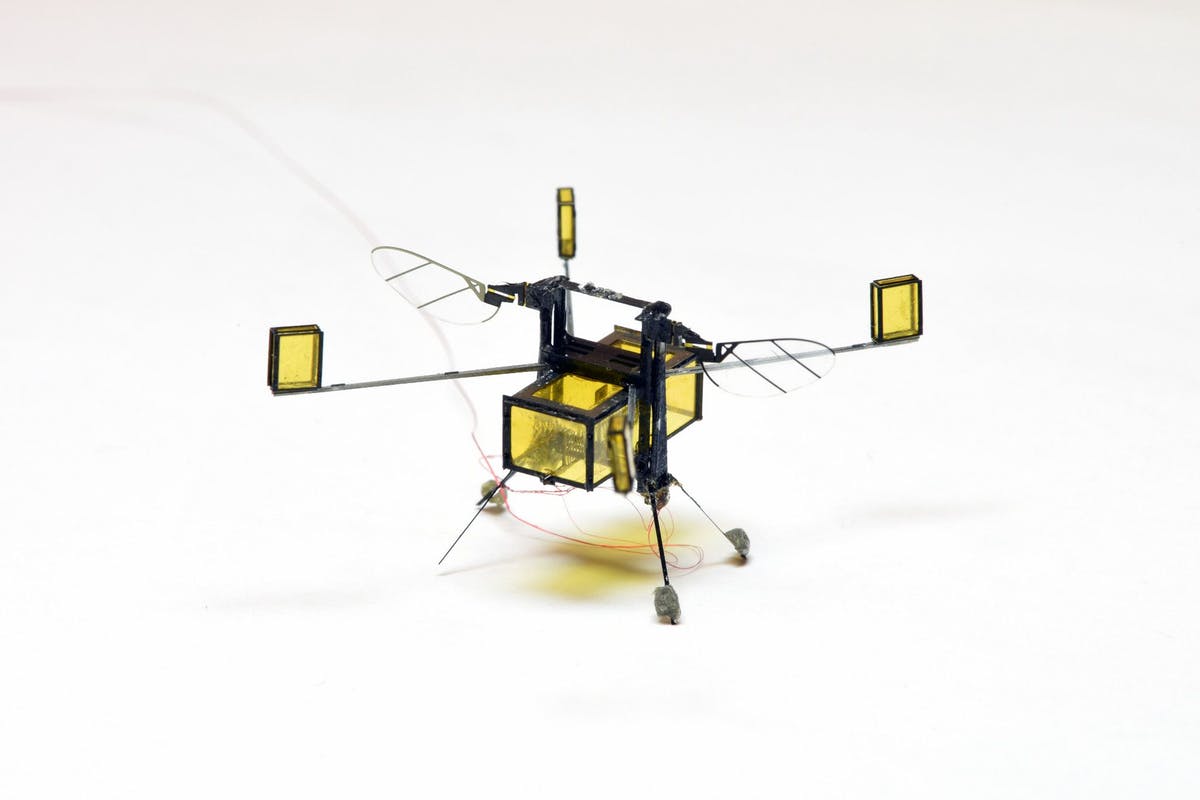
 The International Conference on Robot Ethics and Safety Standards (
The International Conference on Robot Ethics and Safety Standards (
 For the first time,
For the first time, 
 As you know, Robohub is a non-profit dedicated to connecting the robotics community to the public. Over nearly a decade we’ve produced more than
As you know, Robohub is a non-profit dedicated to connecting the robotics community to the public. Over nearly a decade we’ve produced more than