ChatGPT-Generated Exam Answers Dupe Profs
Looks like college take-home tests are destined to suffer the same fate as the Dodo bird.
Instructors at a U.K. university learned as much after a slew of take-home exams featuring answers generated by ChatGPT passed with flying colors — all while evading virtually any suspicions of cheating.
Observes writer Richard Adams: “Researchers at the University of Reading fooled their own professors by secretly submitting AI-generated exam answers that went undetected and got better grades than real students.
“The university’s markers – who were not told about the project – flagged only one of the 33 entries.”
Observes Karen Yeung, a professor at the University of Birmingham: “The publication of this real-world quality assurance test demonstrates very clearly that the generative AI tools — freely and openly available — enable students to cheat take-home examinations without difficulty.”
In other news and analysis on AI writing:
*In-Depth Guide: Lovo AI Text-to-Voice: Writers looking for a reliable text-to-voice solution may want to give Lovo AI a whirl, according to Sharqa Hameed.
Hameed’s guide on the product is extremely valuable in that it offers scores of step-by-step screenshots that truly give you a detailed look at how Lovo AI works.
Hameed’s verdict on the app: “Overall, I’d rate it 4 out of 5.
“It offers various valuable features, including Genny, Auto Subtitle Generator, Text to Speech, Online Video Editor, AI Art Generator, AI Writer and more.
“However, its free version limits you to convert up to 20 minutes of text to audio.”
*Free-for-All: Open Source Promises Wide Array of AI Writing Tools: Facebook founder Mark Zuckerberg predicts that writers and others will continue to have a number of AI choices as the tech grows ever–more sophisticated.
A key player in AI writing/chat tech, Zuckerberg has released his AI code as open-source — available to any and all to use and alter.
Observes Zuckerberg: “I don’t think that AI technology is a thing that should be kind of hoarded and — that one company gets to use it to build whatever central, single product that they’re building.”
*Grand Claims, Meh Results: Google’s AI Falls Short: Apparently, Google’s Gemini — the AI that powers its direct competition to ChatGPT — is not all it’s cracked up to be.
Observes writer Kyle Wiggers: “In press briefings and demos, Google has repeatedly claimed that the models can accomplish previously impossible tasks thanks to their ‘long context.'”
Those tasks include summarizing multiple hundred-page documents or searching across scenes in film footage.
“But new research suggests that the models aren’t, in fact, very good at those things,” Wiggers adds.
*Freelance Writing Dreams Disappearing in a Puff of Code: Add freelancers to the growing list of workers discovering that AI is less a ‘helpful buddy’ and more a ruthless job stealer.
Case in point: Since the advent of ChatGPT, job opportunities in freelance writing have declined 21%, according to a newly updated study.
Observes writer Laura Bratton: “Research shows that easily-automated writing and (computer) coding jobs are being replaced by AI.”
*Privacy Ninja: New AI Email Promises to Guard Your Secrets: Proton, an email provider long-prized for its heavy emphasis on privacy, has added AI to its mix.
Specifically, its newly released AI writing assistant ‘Proton Scribe’ is designed to help users auto-write and proofread their emails.
Observes writer Paul Sawers: “Proton Scribe can be deployed entirely at the local device level — meaning user data doesn’t leave the device.
“Moreover, Proton promises that its AI assistant won’t learn from user data — a particularly important feature for enterprise use cases, where privacy is paramount.”
*Forget Solitaire: Claude Turns AI Writing into a Collaborative Party Game: ChatGPT competitor Claude has a new feature that enables users to publish, share and remix the AI writing and other content that they generate with one another.
Observes writer Eric Hal Schwartz: “Essentially, you can open published ‘Artifacts’ created by others and modify or build upon them through conversations with Claude.
“Anthropic is pitching it as a way to foster a collaborative environment.”
*Robo Lawyer: For Many Attorneys, AI Still a Boogeyman: Despite its considerable benefits to the legal community, AI is viewed warily by many lawyers and pros.
Specifically, 77% of professionals recently surveyed by Thomson Reuters saw AI as a threat to lawyers.
Observes Artificial Lawyer: “While some very innovative lawyers are comfortable with AI and have few worries about the legal world’s imminent demise, there are plenty of lawyers out there who still feel very uncertain about what this all means for them, the profession, and their firms.”
*ChatGPT Mind-Meld: New Hope For the Paralyzed: A man slowly succumbing to paralysis has been given new hope with ChatGPT, which is enabling him to text using his brain waves.
Using a brain implant, the man is able to translate his thoughts into text commands — generated by ChatGPT — which he uses to operate computerized communication devices.
Observes the patient: “You get choices of how you might respond in several different ways.
“So rather than me typing single words, I’m hitting one or two buttons or clicks, if you will, and I’ve got the majority of a sentence done.”
*AI Big Picture: AI Gold Rush Still Runs Hot: Nearly 20 months after ChatGPT introduced a stunned world to the potential of AI, businesses across the world are still clamoring to bring the newly commercialized tech onboard.
Observes writer Ben Dickson: “Most organizations are spending hefty amounts to either explore generative AI use cases or have already implemented them in production,” according to a new survey of 200 IT leaders.
“Nearly three-fourths (73%) of respondents plan to spend more than $500,000 on generative AI in the next 12 months, with almost half (46%) allocating more than $1 million,” Dickson adds.
Share a Link: Please consider sharing a link to https://RobotWritersAI.com from your blog, social media post, publication or emails. More links leading to RobotWritersAI.com helps everyone interested in AI-generated writing.
–Joe Dysart is editor of RobotWritersAI.com and a tech journalist with 20+ years experience. His work has appeared in 150+ publications, including The New York Times and the Financial Times of London.
The post Won’t Get Fooled Again appeared first on Robot Writers AI.


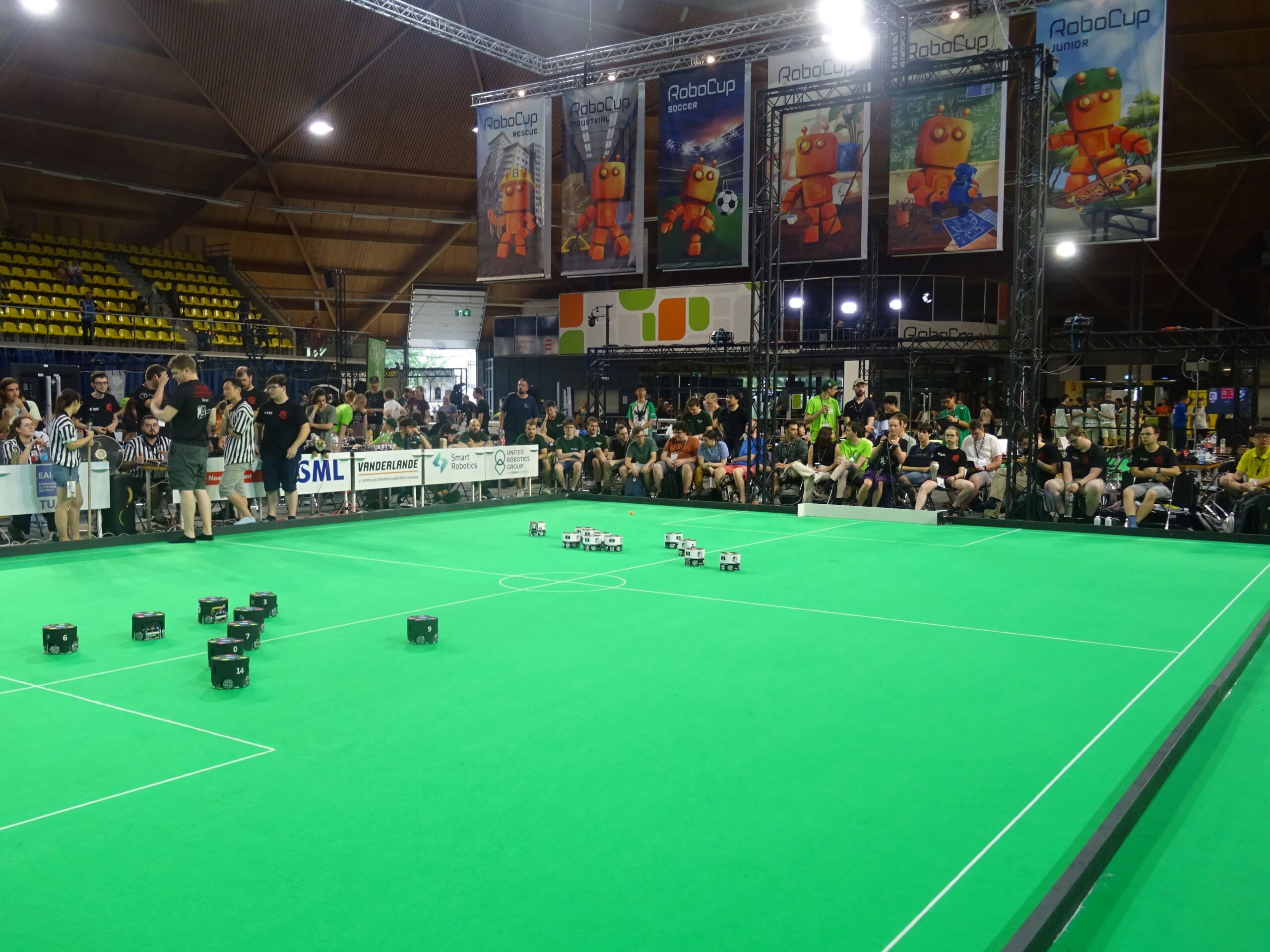 A break in play during a Small Size League match.
A break in play during a Small Size League match. The RedbackBots travelling team for 2024 (L-to-R: Murray Owens, Sam Griffiths, Tom Ellis, Dr Timothy Wiley, Mark Field, Jasper Avice Demay). Photo credit: Dr Timothy Wiley.
The RedbackBots travelling team for 2024 (L-to-R: Murray Owens, Sam Griffiths, Tom Ellis, Dr Timothy Wiley, Mark Field, Jasper Avice Demay). Photo credit: Dr Timothy Wiley.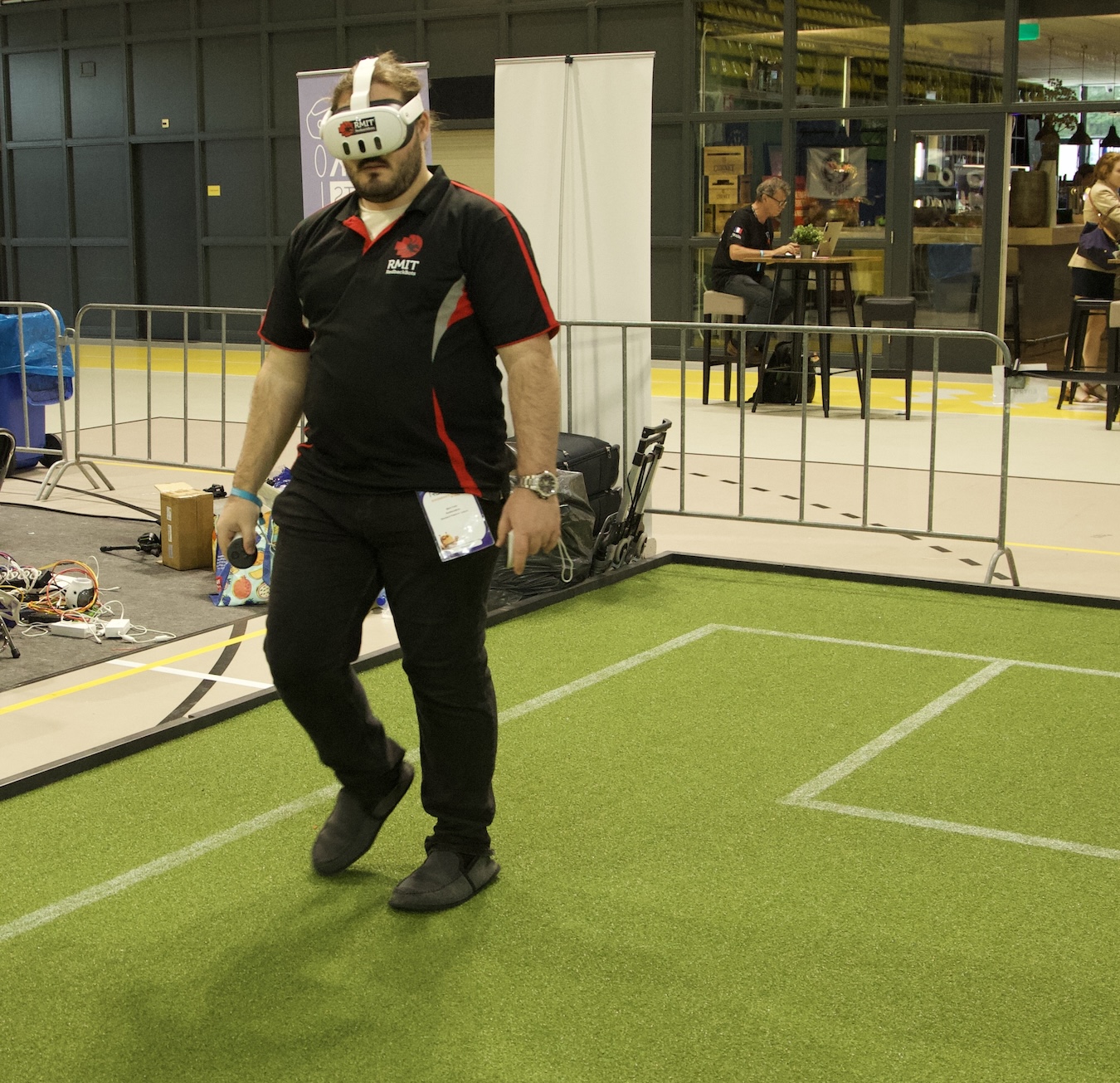 Mark Field setting up the MetaQuest3 to use the augmented reality system. Photo credit: Dr Timothy Wiley.
Mark Field setting up the MetaQuest3 to use the augmented reality system. Photo credit: Dr Timothy Wiley.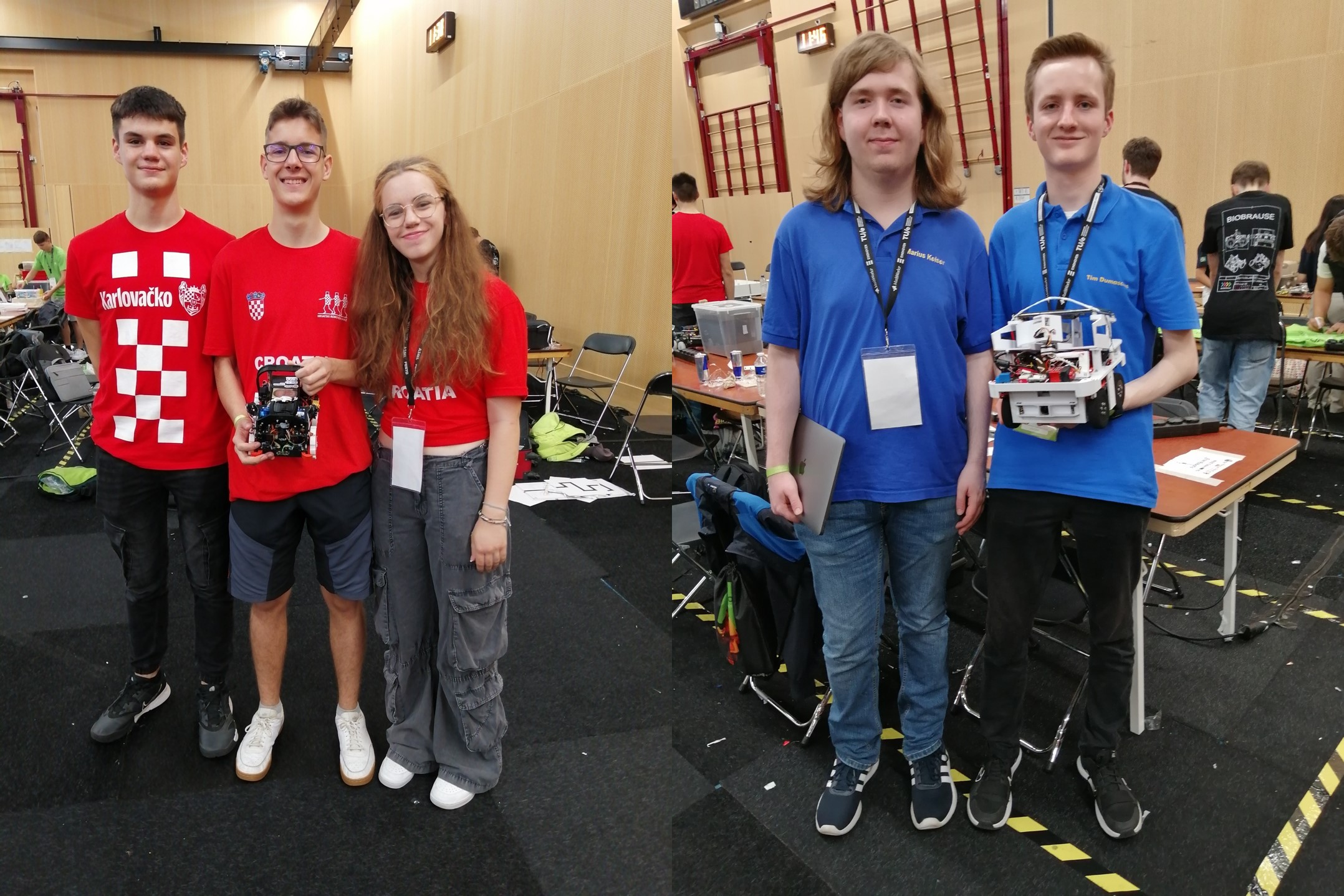 Left: Team Skollska Knijgia. Right: Team Overengeniering2.
Left: Team Skollska Knijgia. Right: Team Overengeniering2.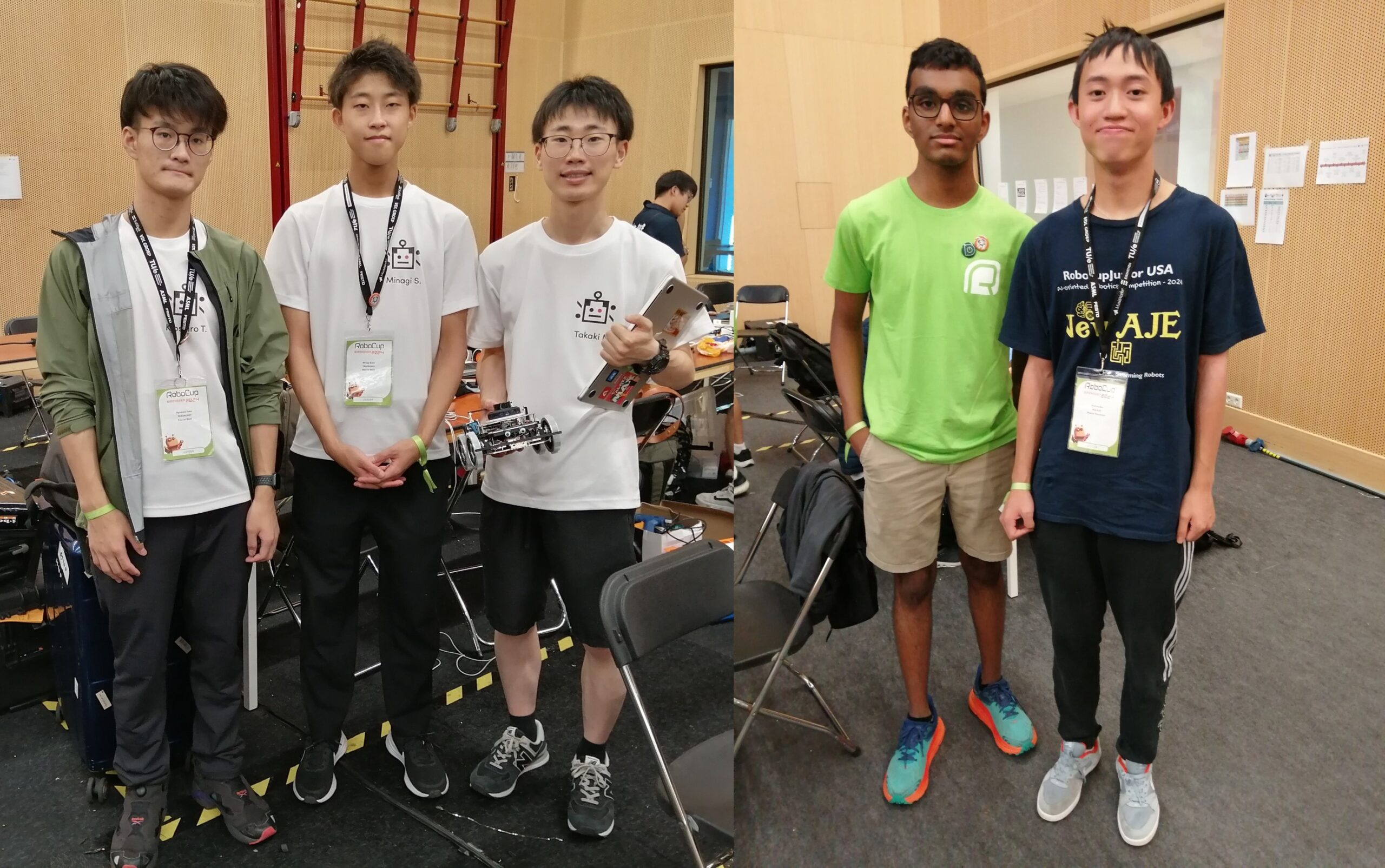 Left: Team Tanorobo! Right: Team New Aje.
Left: Team Tanorobo! Right: Team New Aje. Left: Team Medic Bot Right: Team Jam Session.
Left: Team Medic Bot Right: Team Jam Session. Standing room only to see the Adult Size Humanoids.
Standing room only to see the Adult Size Humanoids. The Standard Platform Soccer League in action.
The Standard Platform Soccer League in action. The RoboCup@Work arena just before competition start.
The RoboCup@Work arena just before competition start. Team MiRobot from UNSW.
Team MiRobot from UNSW. Team LAR@MSL
Team LAR@MSL The LAR@Home team.
The LAR@Home team.