Slender robotic finger senses buried items
Over the years, robots have gotten quite good at identifying objects—as long as they're out in the open.

Meet Maria Vittoria and Inés!
To celebrate Women’s Day 2021 and the 50th anniversary of women’s right to vote in Switzerland, the Swiss NCCRs (National Centres of Competence in Research) wanted to show you who our women researchers are and what a day in their job looks like. The videos are targeted at women and girls of school and undergraduate age to show what day to day life as a scientist is like and make it more accessible. Each NCCR hosted a week where they published several videos covering multiple scientific disciplines, and here we are bringing you what was produced by NCCR Digital Fabrication.
The videos cover a wide range of subjects, including (but not limited to) maths, physics, microbiology, psychology and planetary science, but here we have two women who work with robots.
Maria Vittoria Minniti is a robotics engineer and PhD student, she enhances mobile manipulation capabilities in under-actuated robots.
Inés Ariza is an architect, she uses a robot to 3D print custom metal joints for complex structures.
Head over to YouTube or Instagram (English, German or French) to see the women featured in the #NCCRWomen campaign.
As robot swarms leave the lab and enter our daily lives, it is important that we find ways by which we can effectively communicate with robot swarms, especially ones that contain a high number of robots. In our lab, we are thinking of ways to make swarms for people that are easy and intuitive to interact with. By making robots expressive, we will be able to understand their state and therefore, we will be able to make decisions accordingly. To that extent, we have created a system where humans can build a canvas with robots and create shapes with up to 300 real robots and up to 1000 simulated robots.
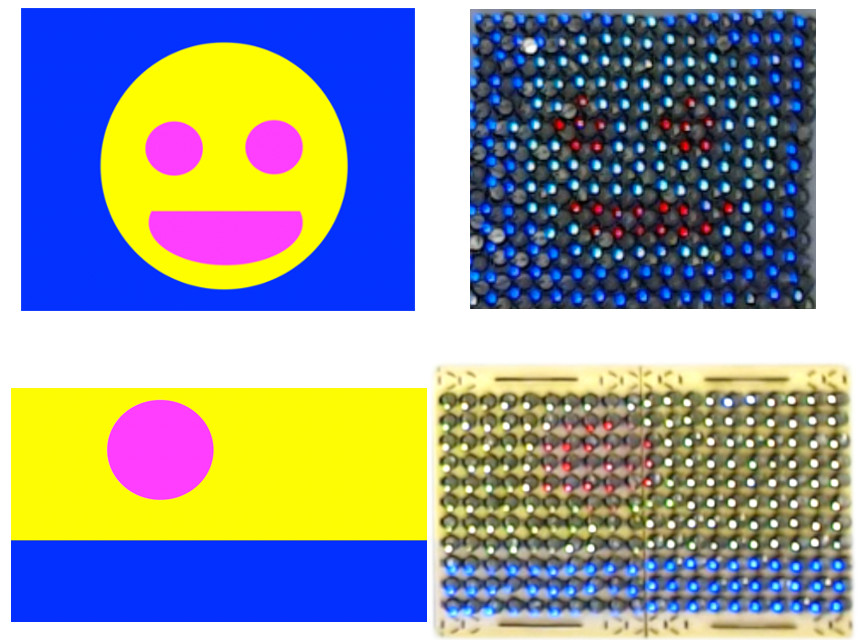
In a system we created called Robotic Canvas, we project an image onto a robot swarm via an overhead projector, and the swarm replicates the image using their LEDs by sensing the colour of light projected. Each robot, therefore, acts as a pixel on the canvas. The humans can then interact with the robot pixels by copying/pasting pixels (LED colour) onto different parts on the canvas, erasing them (turning off LEDs), changing their colour, or saving/retrieving paintings (by saving/retrieving the state of the LED). If a GIF or a video is projected onto the robots, the robots appear to be showing a video. The robots are also decentralised, which means they have no central controller telling them what to do, avoiding a single point of failure of the system. This enables the system to carry on if one robot fails, enabling humans to still interact and create paintings with the rest of the robots. The robots have to resort to talking to their neighbours and sensing their environment in order to obtain information on how to act next. Consequently, robot pixels use only local interactions (i.e. communications with their neighbouring robots) and environmental interactions (i.e. sensing the colour of light and shadows) to be able to tell which interaction is taking place. Here are some images showing the robots recreating images projected onto them.
Here is a performance we did with the robots. This is a story of day and night; the sun sets on the ocean permitting night to arrive. Then, start begin to show in the night sky, and clouds form as well. Finally, the sun rises again.
In Robotic Canvas, the robots were stationary, and they needed to fill out the whole shape to be able to represent the image projected onto them properly. However, we were able to reduce the number of robots used by enabling them to move and aggregate around edges of images projected onto them. This way, a smaller number of robots can be used to represent an image while still preserving clear image representation. We were also able to produce videos with the robots by projecting a video onto them. We used up to 300 real robots (as can be seen from the line, circle and arrow shapes below) and up to 1000 simulated robots (as can be seen in the letters F, T and the blinking eye video).
The way the robots are able to aggregate around edges is again done only through local and environmental interactions. Robots share with their neighbours the light colour they sense. They then combine their neighbours’ opinions with their own to reach a final decision on what colour is being projected. Robots move randomly as long as their opinions match their neighbours’ opinions. If there is a high conflict of opinions, that means robots are standing on an edge, and they stop moving. They then broadcast a message to their neighbours to aggregate around them to represent the edge. We can increase the distance by which neighbours respond to the edge robots, giving us the ability to have thicker or thinner lines of robots on the edges.
The robots do not need to have the image the user wishes for them to represent stored in their memory. That gives the system an important feature: adaptability. The user can change the image projected at any time and the robots will re-configure themselves to represent the new image.
Our research was inspired by the fact that robot swarms and human-swarm interaction are exciting hot topics in today’s world of robotics. Searching for ways by which to interact with swarm robots that neither break their decentralisation nature of not needing a central controller, nor humans needing to interact with each robot separately (as there could potentially be thousands of robots and hence would be unfeasible to update them separately) is an interesting and challenging problem to solve. Therefore, we created the Robotic Canvas to experiment with methods by which a user can relay messages to, and influence the behaviour of, 100’s of robots without needing to communicate with each separately. We researched how we can do such a task only using environmental and/or local interactions only. Furthermore, we decided to add mobility to the robots, which results in using a smaller number of robots for image representation.
While creating paintings and shapes look interesting and fun, the road to creating this system was not without obstacles! Going from working in simulation to working with real-life robots deemed challenging. This was due to noise from robot motion in real robots and also errors in sensor readings. Using a circular arena helped with preventing robots getting stuck at the boundaries of the arena. As for sensing errors, filtering noisy readings before broadcasting opinions to neighbours helped with reducing error in edge detection.
The size of the robots is directly proportional to the resolution of the image, similar to how pixels work. The smaller the robots (and their LEDs), the clearer the picture representation will be. Therefore, there is a limitation on how clearly very complex images could be represented with the current robots used (the Kilobots).
The emergent shape-formation behaviour of robot swarms has many potential applications in the real world. Its expressive nature serves it well as an artistic and interactive visual display. Also, the robots could be used as functional materials which respond to light projections by depositing themselves onto image edges, which could have applications in architecture and electronics. The system could also have applications in ocean clean-ups, where robot swarms could detect and surround pollutants in oceans such as oil spills.
Robotics is both an exciting and intimidating field because it takes so many different capabilities and disciplines to spin up a robot. This goes all the way from mechatronic design and hardware engineering to some of the more philosophical parts of software engineering.
Those who know me also know I’m a total “high-level guy”. I’m fascinated by how complex a modern robotic system is and how all the pieces come together to make something that’s truly impressive. I don’t have particularly deep knowledge in any specific area of robotics, but I appreciate the work of countless brilliant people that give folks like me the ability to piece things together.
In this post, I will go through what it takes to put together a robot that is highly capable by today’s standards. This is very much an opinion article that tries to slice robotic skills along various dimensions. I found it challenging to find a single “correct” taxonomy, so I look forward to hearing from you about anything you might disagree with or have done differently.
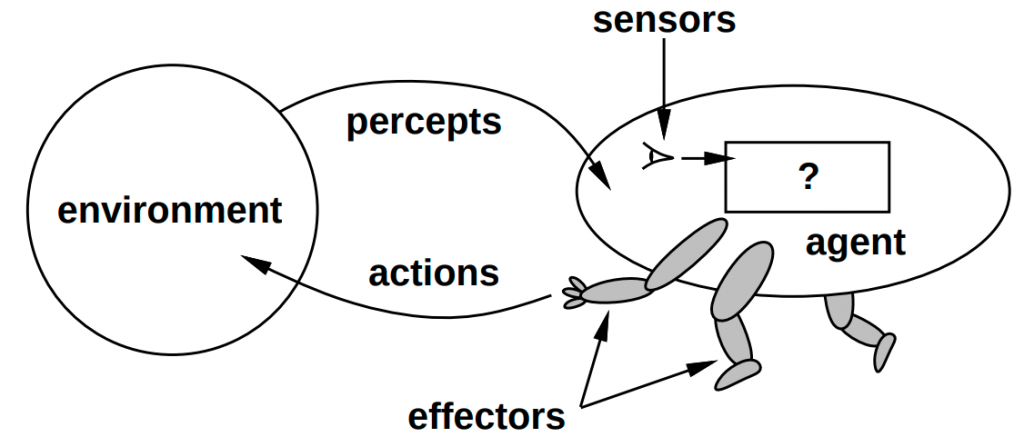
Roughly speaking, a robot is a machine with sensors, actuators, and some computing device that has been programmed to perform some level of autonomous behavior. Below is the essential “getting started” diagram that anyone in AI should recognize.
This opens up the ever present “robot vs. machine” debate that I don’t want to spent too much time on, but my personal distinction between a robot vs. a machine includes a couple of specifications.
Robots are not created equal. Not to say that simpler robots don’t have their purpose — knowing how simple or complex (technology- and budget-wise) to build a robot given the problem at hand is a true engineering challenge. To say it a different way: overengineering is not always necessary.
I will now categorize the capabilities of a robot into three bins: Automatic, Autonomous, and Aware. This roughly corresponds to how low- or high-level a robot’s skills have been developed, but it’s not an exact mapping as you will see.
Automatic: The robot is controllable and it can execute motion commands provided by a human in a constrained environment. Think, for example, of industrial robots in an assembly line. You don’t need to program very complicated intelligence for a robot to put together a piece of an airplane from a fixed set of instructions. What you need is fast, reliable, and sustained operation. The motion trajectories of these robots are often trained and calibrated by a technician for a very specific task, and the surroundings are tailored for robots and humans to work with minimal or no conflict.
Autonomous: The robot can now execute tasks in an uncertain environment with minimal human supervision. One of the most pervasive example of this is self-driving cars (which I absolutely label as robots). Today’s autonomous vehicles can detect and avoid other cars and pedestrians, perform lane-change maneuvers, and navigate the rules of traffic with fairly high success rates despite the negative media coverage they may get for not being 100% perfect.
Aware: This gets a little bit into the “sci-fi” camp of robots, but rest assured that research is bringing this closer to reality day by day. You could tag a robot as aware when it can establish two-way communication with humans. An aware robot, unlike the previous two categories, is not only a tool that receives commands and makes mundane tasks easier, but one that is perhaps more collaborative. In theory, aware robots can understand the world at a higher level of abstraction than their more primitive counterparts, and process humans’ intentions from verbal or nonverbal cues, still under the general goal of solving a real-life problem.
A good example is a robot that can help humans assemble furniture. It operates in the same physical and task space as us humans, so it should adapt to where we choose to position ourselves or what part of the furniture we are working on without getting in the way. It can listen to our commands or requests, learn from our demonstrations, and tell us what it sees or what it might do next in language we understand so we can also take an active part in ensuring the robot is being used effectively.
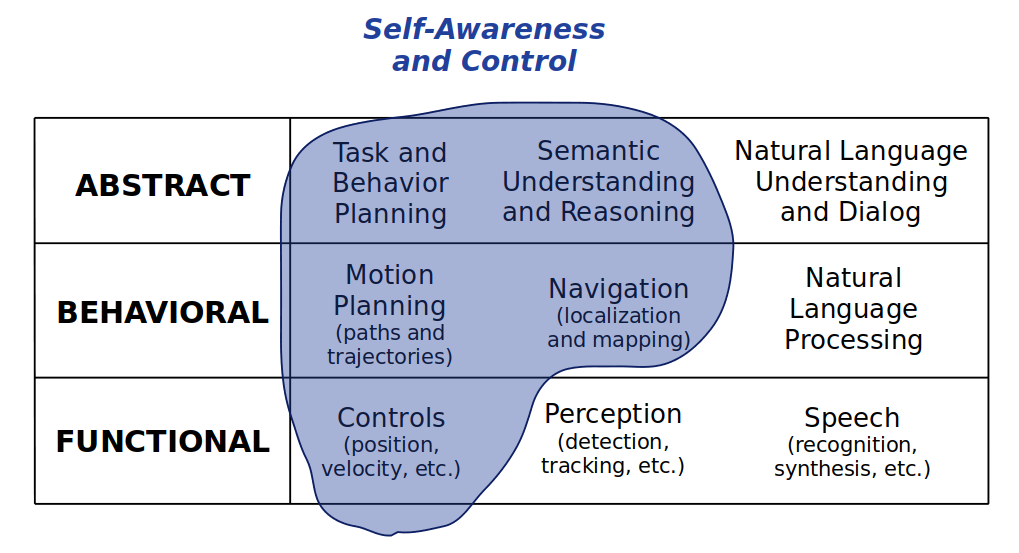
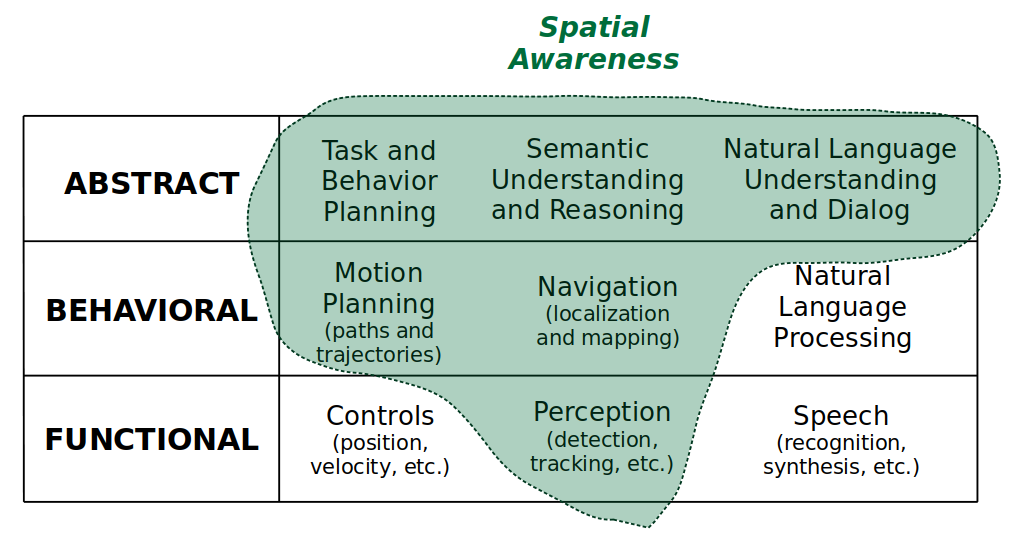
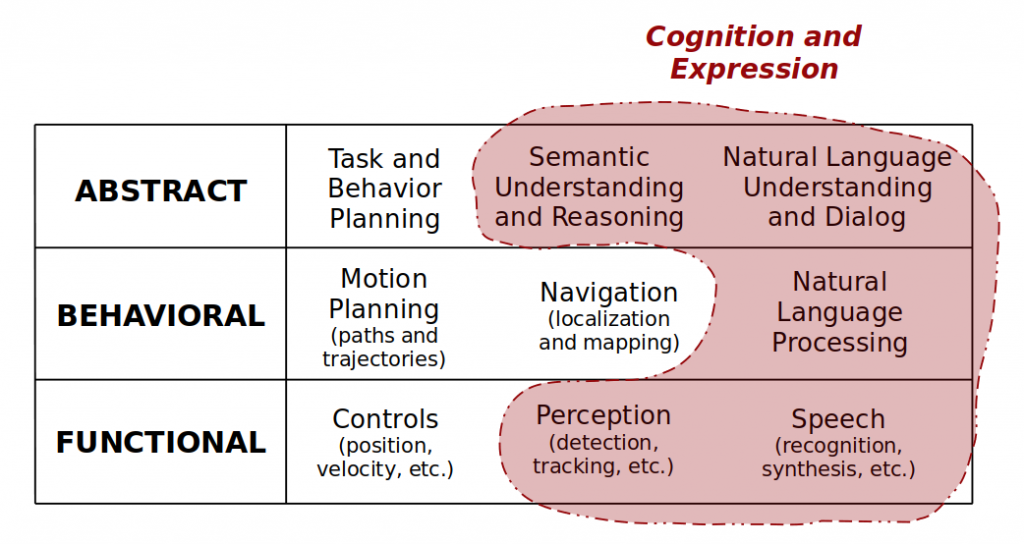
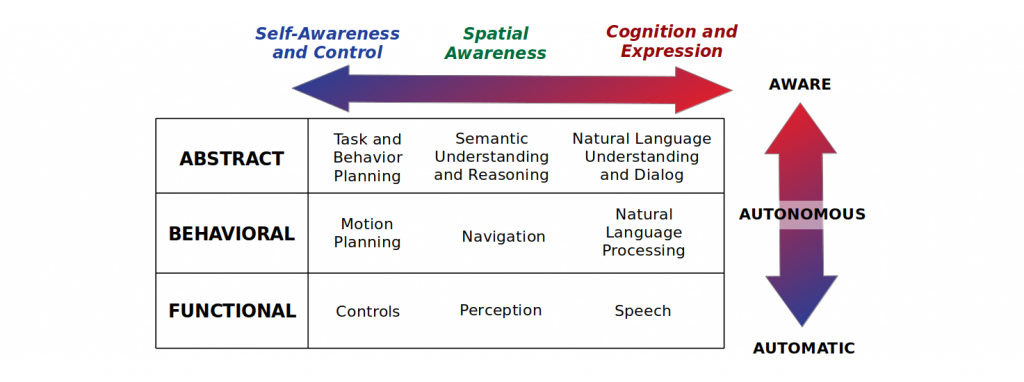
Above you can see a perpendicular axis of categorizing robot awareness. Each highlighted area represents the subset of skills it may require for a robot to achieve awareness on that particular dimension. Notice how forming abstractions — i.e., semantic understanding and reasoning — is crucial for all forms of awareness. That is no coincidence.
The most important takeaway as we move from automatic to aware is the increasing ability for robots to operate “in the wild”. Whereas an industrial robot may be designed to perform repetitive tasks with superhuman speed and strength, a home service robot will often sacrifice this kind of task-specific performance with more generalized skills needed for human interaction and navigating uncertain and/or unknown environments.
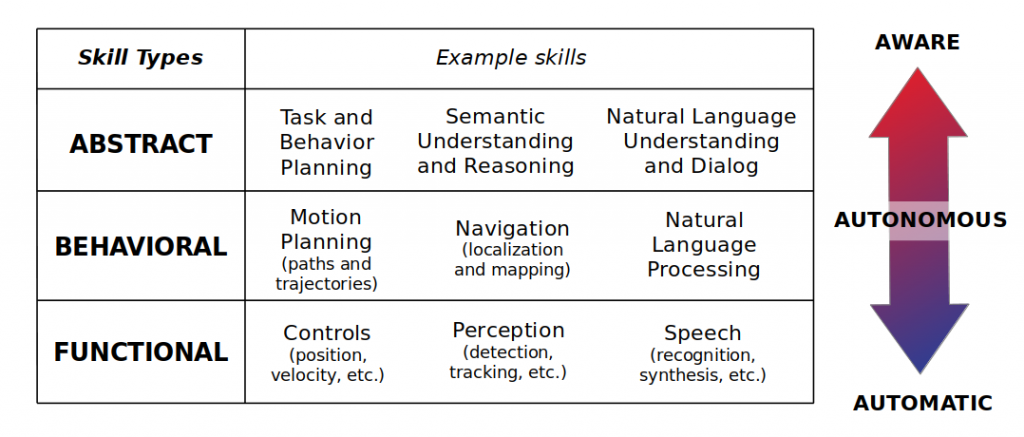
Spinning up a robot requires a combination of skills at different levels of abstraction. These skills are all important aspects of a robot’s software stack and require vastly different areas of expertise. This goes back to the central point of this blog post: it’s not easy to build a highly capable robot, and it’s certainly not easy to do it alone!

This denotes the low-level foundational skills of a robot. Without a robust set of functional skills, you would have a hard time getting your robot to be successful at anything else higher up the skill chain.
Being at the lowest level of abstraction, functional skills are closely tied to direct interaction with the actuators and sensor of the robot. Indeed, these skills can be discussed along the acting and sensing modalities.
Acting
Sensing

Behavioral skills are a step above the more “raw” sensor-to-actuator processing loops that we explored in the Functional Skills section. Creating a solid set of behavioral skills simplifies our interactions with robots both as users and programmers.
At the functional level, we have perhaps demonstrated capabilities for the robot to respond to very concrete, mathematical goals. For example,
At the behavioral level, commands may take the form of:
Abstracting away these motion planning and navigation tasks requires a combination of models of the robot and/or world, and of course, our set of functional skills like perception and control.
If this hasn’t yet got across, behavioral skills and functional skills definitely do not work in isolation. Motion planning in a space with obstacles requires perception and navigation. Navigating in a world requires controls and motion planning.
On the language side, Natural Language Processing (NLP) is what takes us from raw text input — whether it came from speech or directly typed in — to something more actionable for the robot. For instance, if a robot is given the command “bring me a snack from the kitchen”, the NLP engine needs to interpret this at the appropriate level to perform the task. Putting it all together,

Simply put, abstract skills are the bridge between humans and robot behaviors. All the skills in the row above perform some transformation that lets humans more easily express their commands to robots, and similarly lets robots more easily express themselves to humans.
Task and Behavior Planning operates on the key principles of abstraction and composition. A command like “get me a snack from the kitchen” can be broken down into a set of fundamental behaviors (navigation, motion planning, perception, etc.) that can be parameterized and thus generalized to other types of commands such as “put the bottle of water in the garbage”. Having a common language like this makes it useful for programmers to add capabilities to robots, and for users to leverage their robot companions to solve a wider set of problems. Modeling tools such as finite-state machines and behavior trees have been integral in implementing such modular systems.
Semantic Understanding and Reasoning is bringing abstract knowledge to a robot’s internal model of the world. For example, in navigation we saw that a map can be represented as “occupied vs. unoccupied”. In reality, there are more semantics that can enrich the task space of the robot besides “move here, avoid there”. Does the environment have separate rooms? Is some of the “occupied space” movable if needed? Are there elements in the world where objects can be stored and retrieved? Where are certain objects typically found such that the robot can perform a more targeted search? This recent paper from Luca Carlone’s group is a neat exploration into maps with rich semantic information, and a huge portal of future work that could build on this.
Natural Language Understanding and Dialog is effectively two-way communication of semantic understanding between humans and robots. After all, the point of abstracting away our world model was so we humans could work with it more easily. Here are examples of both directions of communication:
This is all a bit of a pipe dream — Can a robot really be programmed to work with humans at such a high level of interaction? It’s not easy, but research tries to tackle problems like these every day. I believe a good measure of effective human-robot interaction is whether the human and robot jointly learn not to run into the same problem over and over, thus improving the user experience.
Thanks for reading, even if you just skimmed through the pictures. I hope this was a useful guide to navigating robotic systems that was somewhat worth its length. As I mentioned earlier, no categorization is perfect and I invite you to share your thoughts.
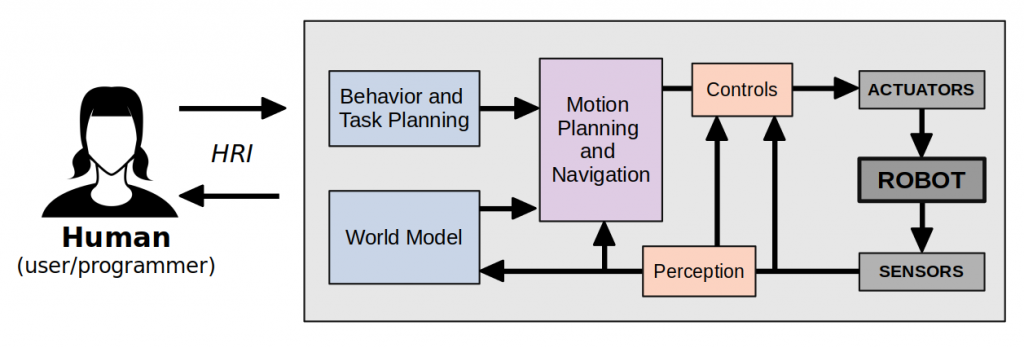
Going back to one of my specifications: A robot has at least one closed feedback loop between sensing and actuation that does not require human input. Let’s try put our taxonomy in an example set of feedback loops below. Note that I’ve condensed the natural language pipeline into the “HRI” arrows connecting to the human.
Because no post today can evade machine learning, I also want to take some time make readers aware of machine learning’s massive role in modern robotics.
The truth is, our human knowledge is being outperformed by machine learning for processing such high-dimensional data. Always remember that machine learning shouldn’t be a crutch due to its biggest pitfall: We can’t (yet) explain why learned systems behave the way they do, which means we can’t (yet) formulate the kinds guarantees than we can with traditional methods. The hope is to eventually refine our collective scientific knowledge so we’re not relying on data-driven black-box approaches. After all, knowing how and why robots learn will only make them more capable in the future.
On that note, you have earned yourself a break from reading. Until next time!

By Clara Marc
There is strength in numbers. That’s true not only for humans, but for drones too. By flying in a swarm, they can cover larger areas and collect a wider range of data, since each drone can be equipped with different sensors.
Preventing drones from bumping into each other
One reason why drone swarms haven’t been used more widely is the risk of gridlock within the swarm. Studies on the collective movement of animals show that each agent tends to coordinate its movements with the others, adjusting its trajectory so as to keep a safe inter-agent distance or to travel in alignment, for example.
“In a drone swarm, when one drone changes its trajectory to avoid an obstacle, its neighbors automatically synchronize their movements accordingly,” says Dario Floreano, a professor at EPFL’s School of Engineering and head of the Laboratory of Intelligent Systems (LIS). “But that often causes the swarm to slow down, generates gridlock within the swarm or even leads to collisions.”
Not just reacting, but also predicting
Enrica Soria, a PhD student at LIS, has come up with a new method for getting around that problem. She has developed a predictive control model that allows drones to not just react to others in a swarm, but also to anticipate their own movements and predict those of their neighbors. “Our model gives drones the ability to determine when a neighbor is about to slow down, meaning the slowdown has less of an effect on their own flight,” says Soria. The model works by programing in locally controlled, simple rules, such as a minimum inter-agent distance to maintain, a set velocity to keep, or a specific direction to follow. Soria’s work has just been published in Nature Machine Intelligence.
With Soria’s model, drones are much less dependent on commands issued by a central computer. Drones in aerial light shows, for example, get their instructions from a computer that calculates each one’s trajectory to avoid a collision. “But with our model, drones are commanded using local information and can modify their trajectories autonomously,” says Soria.
A model inspired by nature
Tests run at LIS show that Soria’s system improves the speed, order and safety of drone swarms in areas with a lot of obstacles. “We don’t yet know if, or to what extent, animals are able to predict the movements of those around them,” says Floreano. “But biologists have recently suggested that the synchronized direction changes observed in some large groups would require a more sophisticated cognitive ability than what has been believed until now.”